一种无人直升机桨叶的制作方法
本发明涉及无人机,具体涉及一种无人直升机桨叶。
背景技术:
1、随着无人机技术的发展,其被广泛应用在航拍、远程空中监控、监测、侦察、植保、消防等领域。按照无人机气动布局方式的不同,无人机可划分为无人固定翼、无人直升机、无人多旋翼等。
2、无人固定翼飞行效率最高,续航时间长,巡航速度高,但需要跑道,无法定点悬停,机动性最差;无人多旋翼结构最简单,操作简单,容错能力强,成本低廉,垂直起降,定点悬停,但目前航时和载重较小;无人直升机垂直起降,定点悬停,机动性最好,航时和载重较大,但成本较高。
3、在植保、消防等领域,对无人机的航时和载重具有较高要求,因此采用无人直升机为主。例如,在农业上,无人机可以携带药箱为染上病虫害的区域喷洒药,不但比人工打药速度高出许多,使用的药量、水量也比人工打药要少很多,且能高效地适应各种作业环境,可以减免对人带来的例如中暑等的危害。
4、无人直升机在使用过程中其桨叶部分容易与地面或障碍物磕碰而损坏,现有的桨叶与驱动电机组装过程以及拆卸过程,均需要使用工具,具有费时费力的问题,大大影响了工作效率,同时也增加相关零配件的额外磨损,为此,我们提供了一种无人直升机桨叶解决以上问题。
技术实现思路
1、本发明的目的就是为了弥补现有技术的不足,提供了一种无人直升机桨叶,解决了桨叶与驱动电机组装过程以及拆卸过程,均需要使用工具,具有费时费力的问题,大大影响了工作效率的问题。
2、本发明为解决上述技术问题,提供如下技术方案:
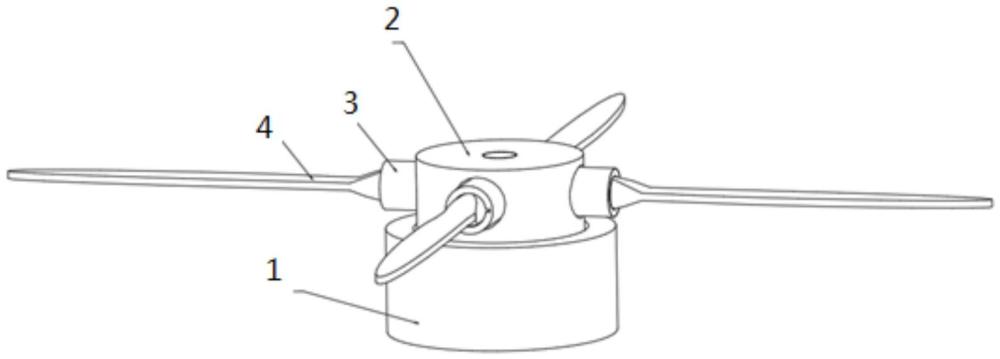
3、一种无人直升机桨叶,包括无人机本体1、固定单元2、桨夹3和桨叶本体4,其中:
4、固定单元2设置在无人机本体1的表面,桨夹3固定在固定单元2表面,桨叶本体4固定在桨夹3表面;桨夹3和桨叶本体4均有至少两组,且呈环形均匀排布在固定组件表面;通过桨夹3和桨叶本体4的相互配合,快速将桨叶本体4从桨夹3表面安装和拆卸;
5、无人机本体1包括安装座101以及开设在安装座101表面的固定槽102和第一限位槽103;
6、固定单元2包括桨毂201以及开设在桨毂201内部的活动仓202,活动仓202内部设置有转动轴203、螺纹管204、推动块206和限位杆207;
7、桨夹3包括连接块301以及开设在连接块301表面的伸缩槽302,伸缩槽302内部设置有伸缩杆303和卡块304,伸缩槽302表面还开设有转动槽307和第二限位槽306。
8、具体的,限位杆207穿设在活动仓202表面,限位杆207一端能够卡接在第一限位槽103中。
9、具体的,桨毂201与固定槽102相匹配,桨毂201卡接在固定槽102内部,转动轴203通过轴承穿设在活动仓202表面,转动轴203表面开设有螺纹,螺纹管204通过螺纹与转动轴203活动连接,转动轴203另一端固定有旋钮205,桨毂201表面开设有凹槽2011,旋钮205设置在凹槽2011内部,推动块206固定在螺纹管204一端。
10、具体的,限位杆207表面套接有第一弹簧208,限位杆207表面固定有挡块,限位杆207与推动块206相对应,伸缩杆303和第一弹簧208均有两个,且对称排布在推动块206两侧。
11、具体的,桨毂201表面开设有第二连接槽,连接块301固定在第二连接槽内壁,伸缩杆303固定在伸缩槽302内壁,卡块304通过轴承固定在伸缩杆303一端,伸缩杆303表面套接有第二弹簧305。
12、具体的,伸缩槽302表面还开设有第一连接槽308,第一连接槽308与转动槽307相连通,第二限位槽306与转动槽307相连通。
13、具体的,桨叶本体4表面固定有固定块402,固定块402与第一连接槽308、转动槽307和第二限位槽306相匹配,桨叶本体4表面还开设有卡槽401,卡槽401与卡块304相对应。
14、具体的,首先将无人直升机桨叶放置在合适的位置,随后将桨叶本体4表面的固定块402与桨夹3表面的第一连接槽308对齐,然后推动桨叶本体4,使得固定块402能够在第一连接槽308中移动,同时使卡块304能够卡接在桨叶本体4表面的卡槽401中,当固定块402移动至转动槽307中,即可转动桨叶本体4,同时能够带动固定在桨叶本体4侧面的固定块402和通过轴承固定在伸缩杆303一端的卡块304同步转动,当桨叶本体4转动至指定的角度时,在第二弹簧305回弹力的作用下,推动固定块402至第二限位槽306中,完成对桨叶本体4的固定。
15、然后,将固定有桨叶本体4的桨毂201放置在固定槽102中,随后拧动旋钮205,带动转动轴203转动,在滑块2041和滑槽的配合下,转动轴203得以带动螺纹管204进行移动,从而带动固定在螺纹管204一端的推动块206同步移动,随后推动块206推动限位杆207向两侧移动,当限位杆207一端卡接在第一限位槽103中,即可停止拧动旋钮205,完成对桨毂201的固定。
16、与现有技术相比,该无人直升机桨叶具备如下有益效果:
17、一、本发明通过桨夹和桨叶本体的相互配合,能够快速将桨叶本体从桨夹表面安装和拆卸,可以在不使用螺栓从而完成桨叶本体与桨夹之间的固定,同样的桨叶本体与桨夹之间的拆分也不需要辅助工具,从而方便对桨夹与桨叶本体之间进行安装,同时配合固定组件,还能够方便对整个桨毂进行安装和拆卸,从而提高对装置的拆卸效率。
18、二、本发明通过伸缩槽、第二弹簧、卡块、第二限位槽和第一连接槽相结合的结构,使得安装桨叶时只需推动桨叶表面的固定块与第一连接槽对齐,并使卡块卡接在卡槽中,推动桨叶本体至转动槽中,将桨叶本体转动至指定角度,随后松开桨叶本体,通过第二弹簧将桨叶本体推动至第二限位槽中,无需附加其他动作,使其操作更加简单新颖,无借助任何工具,大幅度提高了安装或拆卸效率。
19、三、本发明通过固定组件,能够方便将桨毂从无人机本体表面拆卸下来,可拆卸桨毂使得更换受损或老化的桨叶变得更加容易,无需整个电机都要进行更换,节省了时间和成本,也方便进行定期维护和清洁,同时可拆卸桨毂设计可以允许使用者更换不同类型或尺寸的桨叶,以适应不同的飞行需求,进而提高飞行效率或增加飞行稳定性。
20、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。
技术特征:
1.一种无人直升机桨叶,其特征在于,包括无人机本体(1)、固定单元(2)、桨夹(3)和桨叶本体(4),其中:
2.根据权利要求1所述的无人直升机桨叶,其特征在于,限位杆(207)穿设在活动仓(202)表面,限位杆(207)一端能够卡接在第一限位槽(103)中。
3.根据权利要求1所述的无人直升机桨叶,其特征在于,桨毂(201)与固定槽(102)相匹配,桨毂(201)卡接在固定槽(102)内部,转动轴(203)通过轴承穿设在活动仓(202)表面,转动轴(203)表面开设有螺纹,螺纹管(204)通过螺纹与转动轴(203)活动连接,转动轴(203)另一端固定有旋钮(205),桨毂(201)表面开设有凹槽(2011),旋钮(205)设置在凹槽(2011)内部,推动块(206)固定在螺纹管(204)一端。
4.根据权利要求1所述的无人直升机桨叶,其特征在于,限位杆(207)表面套接有第一弹簧(208),限位杆(207)表面固定有挡块,限位杆(207)与推动块(206)相对应,伸缩杆(303)和第一弹簧(208)均有两个,且对称排布在推动块(206)两侧。
5.根据权利要求1所述的无人直升机桨叶,其特征在于,桨毂(201)表面开设有第二连接槽,连接块(301)固定在第二连接槽内壁,伸缩杆(303)固定在伸缩槽(302)内壁,卡块(304)通过轴承固定在伸缩杆(303)一端,伸缩杆303表面套接有第二弹簧(305)。
6.根据权利要求1所述的无人直升机桨叶,其特征在于,伸缩槽(302)表面还开设有第一连接槽(308),第一连接槽(308)与转动槽(307)相连通,第二限位槽(306)与转动槽(307)相连通。
7.根据权利要求1所述的无人直升机桨叶,其特征在于,桨叶本体(4)表面固定有固定块(402),固定块(402)与第一连接槽(308)、转动槽(307)和第二限位槽(306)相匹配,桨叶本体(4)表面还开设有卡槽(401),卡槽(401)与卡块(304)相对应。
8.根据权利要求1所述的无人直升机桨叶,其特征在于,首先将无人直升机桨叶放置在合适的位置,随后将桨叶本体(4)表面的固定块(402)与桨夹(3)表面的第一连接槽(308)对齐,然后推动桨叶本体(4),使得固定块(402)能够在第一连接槽(308)中移动,同时使卡块(304)能够卡接在桨叶本体(4)表面的卡槽(401)中,当固定块(402)移动至转动槽(307)中,即可转动桨叶本体(4),同时能够带动固定在桨叶本体(4)侧面的固定块(402)和通过轴承固定在伸缩杆(303)一端的卡块(304)同步转动,当桨叶本体(4)转动至指定的角度时,在第二弹簧(305)回弹力的作用下,推动固定块(402)至第二限位槽(306)中,完成对桨叶本体(4)的固定;
技术总结
本申请提供一种无人直升机桨叶,包括无人机本体1、固定单元2、桨夹3和桨叶本体4,其中:固定单元2设置在无人机本体1的表面,桨夹3固定在固定单元2表面,桨叶本体4固定在桨夹3表面;桨夹3和桨叶本体4均有至少两组,且呈环形均匀排布在固定组件表面;通过桨夹3和桨叶本体4的相互配合,快速将桨叶本体4从桨夹3表面安装和拆卸,在不使用螺栓从而完成桨叶本体4与桨夹3之间的固定,同样的桨叶本体4与桨夹3之间的拆分也不需要辅助工具,从而实现对桨夹3与桨叶本体4之间的安装,同时配合固定组件,还能够方便对整个桨毂201进行安装和拆卸,从而提高对装置的拆卸效率。
技术研发人员:祝辉林,段航航,刘颂华,李宏,帅京,张婧妍,刘志辉
受保护的技术使用者:昌河飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!