一种分布式驱动无人机的协同控制方法与流程
本发明一种分布式驱动无人机的协同控制方法涉及无人机的电机控制方法。
背景技术:
1、为保障电力安全可靠供应,在电网的巡检中,无人机巡检技术得到了广泛的应用;考虑到传统无人机驱动功率不足的问题,分布式驱动系统逐渐成为无人机的优选动力解决方案。但由于各分布式驱动系统之间的相互影响和协调运动的复杂性,其控制方法对精度和效率的要求较高,为此,国内外学者提出了多种控制方案,如主令控制、主从控制等。其中,主令控制与主从控制作为初级的开环控制方式,控制系统简单,在一些精度要求较低的场合有着广泛的应用,但缺点在于对分布式驱动无人机这种对协同控制精度要求较高的系统并不适用。因此,对于分布式驱动电力巡检无人机的协同控制问题,需要一种更加合适的控制方法来解决上述问题。
技术实现思路
1、本发明的目的是为分布式驱动无人机提供一种协同控制的方法,用于解决传统主从控制精度较低协调性较差的问题,降低控制时间延迟,增强分布式驱动系统的鲁棒性。
2、为实现上述目的,本发明提供如下一种分布式驱动无人机的协同控制方法,包括如下步骤:
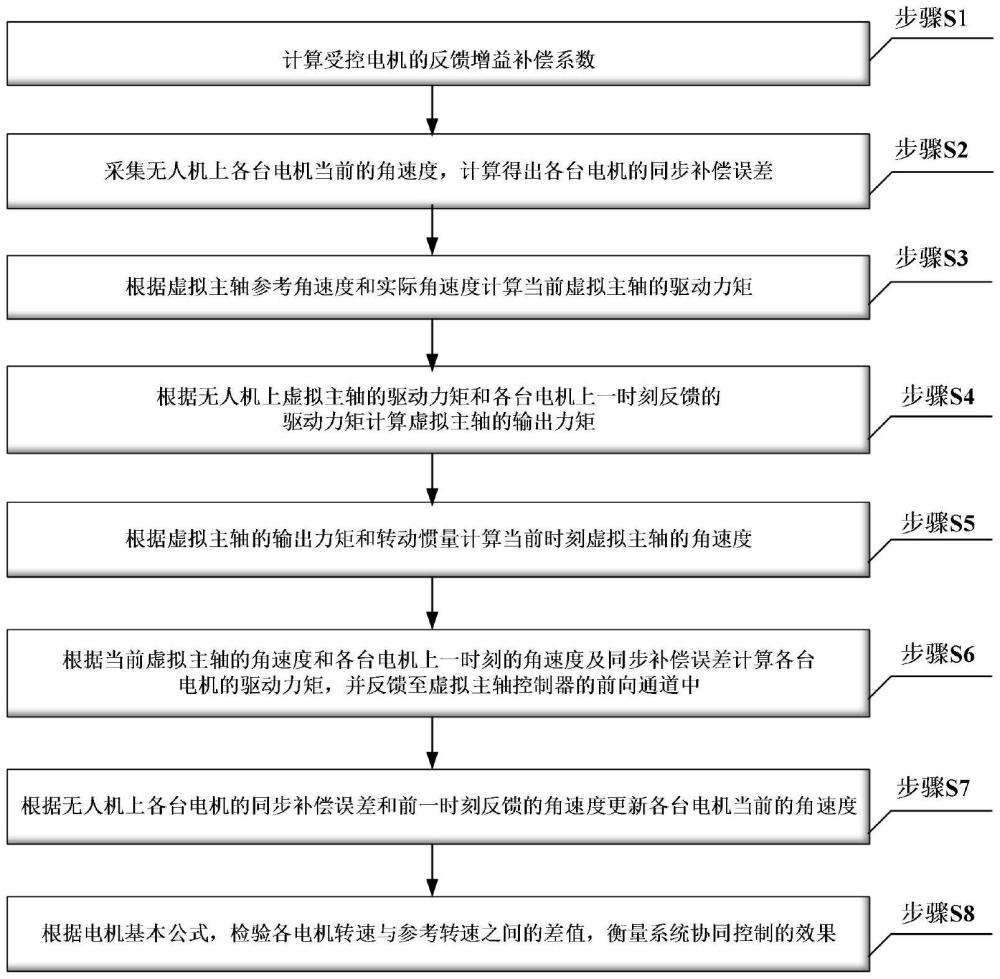
3、s1.计算受控电机的反馈增益补偿系数;
4、s2.采集无人机上各台电机当前的角速度,计算得出各台电机的同步补偿误差;
5、s3.根据虚拟主轴参考角速度和实际角速度计算当前虚拟主轴的驱动力矩;
6、s4.根据无人机上虚拟主轴的驱动力矩和各台电机上一时刻反馈的驱动力矩计算虚拟主轴的输出力矩;
7、s5.根据虚拟主轴的输出力矩和转动惯量计算当前时刻虚拟主轴的角速度;
8、s6.根据当前虚拟主轴的角速度和各台电机上一时刻的角速度及同步补偿误差计算各台电机的驱动力矩,并反馈至虚拟主轴控制器的前向通道中;
9、s7.根据无人机上各台电机的同步补偿误差和前一时刻反馈的角速度更新各台电机当前的角速度;
10、s8.根据电机基本公式,检验各电机转速与参考转速之间的差值,衡量系统协同控制的效果。
11、进一步地,s1中,计算受控电机的反馈增益补偿系数的具体方法为:
12、通过下式计算各受控电机i与其余电机j的反馈增益补偿系数kij:
13、
14、式中,ji为电机i的转动惯量。
15、进一步地,s2中,所述计算各台电机的同步补偿误差的具体方法为:
16、通过下式计算各台电机的同步补偿误差:
17、
18、式中,ei表示第i台电机的同步补偿误差,ωi表示第i台电机的角速度。
19、进一步地,s3中,所述根据虚拟主轴参考角速度和实际角速度计算当前虚拟主轴的驱动力矩的具体方法为:
20、通过下式计算计算虚拟主轴的驱动力矩t:
21、
22、式中,ωr表示虚拟主轴的参考角速度,ωm表示虚拟主轴的角速度,km表示虚拟主轴的弹性系数。
23、进一步地,若考虑主轴衰减系数,所述计算当前虚拟主轴的驱动力矩的具体方法为:
24、通过下式计算计算考虑主轴衰减系数的虚拟主轴的驱动力矩t:
25、
26、式中,bm表示虚拟主轴的衰减系数。
27、进一步地,s4中,所述根据无人机上虚拟主轴的驱动力矩和各台电机上一时刻反馈的驱动力矩计算虚拟主轴的输出力矩的具体方法为:
28、通过下式计算虚拟主轴的输出力矩:
29、
30、式中,ti表示各台电机反馈至虚拟主轴控制器的前向通道中的驱动力矩。
31、进一步地,s5中,所述根据虚拟主轴的输出力矩和转动惯量计算当前时刻虚拟主轴的角速度的具体方法为:
32、
33、式中,jm表示主轴的转动惯量。
34、进一步地,s6中,所述根据当前虚拟主轴的角速度和各台电机上一时刻的角速度及同步补偿误差计算各台电机的驱动力矩的具体方法为:
35、通过下式计算各台电机的驱动力矩:
36、
37、式中,bs表示电机轴的衰减系数,ωi表示第i台电机上一时刻的角速度,ks表示电机轴的弹性系数。
38、进一步地,s7中,所述根据无人机上各台电机的同步补偿误差和前一时刻反馈的角速度更新各台电机当前的角速度的具体方法为:
39、通过下式计算各台电机当前的角速度:
40、
41、式中,j表示电机的转动惯量,b表示电机的阻尼系数。
42、进一步地,s8中,所述根据电机基本公式检验各电机转速与参考转速之间的差值,衡量系统协同控制的效果的具体方法为:
43、
44、式中,nr表示电机的参考转速,ωi表示各台电机的角速度。
45、所述的无人机为多轴旋翼无人机,所述的无人机为市售产品;进一步地为四轴旋翼无人机。
46、本发明提供一种分布式驱动无人机的协同控制方法,通过采用虚拟主轴—偏差耦合控制方法,解决了传统主从控制精度较低协调性较差的问题,增强分布式驱动系统的鲁棒性。
技术特征:
1.一种分布式驱动无人机的协同控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
3.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
4.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
5.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
6.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
7.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
8.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
9.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
10.根据权利要求1所述的一种分布式驱动无人机的协同控制方法,其特征在于:
技术总结
本发明一种分布式驱动无人机的协同控制方法涉及无人机的电机控制方法,其步骤为:S1.计算受控电机的反馈增益补偿系数;S2.计算得出各台电机的同步补偿误差;S3.计算当前虚拟主轴的驱动力矩;S4.计算虚拟主轴的输出力矩;S5.根据虚拟主轴的输出力矩和转动惯量计算当前时刻虚拟主轴的角速度;S6.根据当前虚拟主轴的角速度和各台电机上一时刻的角速度及同步补偿误差计算各台电机的驱动力矩,并反馈至虚拟主轴控制器的前向通道中;S7.根据无人机上各台电机的同步补偿误差和前一时刻反馈的角速度更新各台电机当前的角速度。S8.根据电机基本公式,检验各电机转速与参考转速之间的差值,衡量系统协同控制的效果。
技术研发人员:孙鄞,张翔,胡浩,孙畅,徐俊涵,龚一平,单光瑞,吴宁,袁帅,侯超
受保护的技术使用者:国网江苏省电力有限公司镇江供电分公司
技术研发日:
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!