一种大展弦比机翼颤振控制方法及其控制装置与流程
本申请涉及无人机,尤其涉及一种大展弦比机翼颤振控制方法及其控制装置。
背景技术:
1、机翼颤振作为一种潜在的动态不稳定性问题,一直是影响无人机性能与安全性的关键因素之一。颤振现象主要源于机翼在高速飞行过程中,由于气动力与结构弹性力之间的相互作用,导致机翼结构发生周期性振动。这种振动不仅可能引发结构疲劳,还可能迅速放大,最终导致结构破坏,因此,对颤振的有效控制是确保无人机安全飞行的重要前提。
2、大展弦比机翼设计是现代高空长航时无人机追求高效升阻比、增加飞行距离与滞空时间的常用手段。然而,由于机翼的刚度相对较低,飞行中容易产生较大的变形,尤其是在高速飞行条件下,机翼的弹性变形与气动力之间的相互作用更为剧烈,增加了颤振发生的风险。颤振速度为在不引起结构破坏的前提下,无人机所能达到的最大飞行速度,成为限制这类无人机性能提升的重要因素。
3、因此,如何提高颤振速度,使无人机在更高的速度下安全飞行,从而提高其飞行性能成为待解决的问题。
技术实现思路
1、在本申请实施例中,通过提供一种大展弦比机翼颤振控制方法,解决了如何提高颤振速度,使无人机在更高的速度下安全飞行,从而提高其飞行性能的问题。
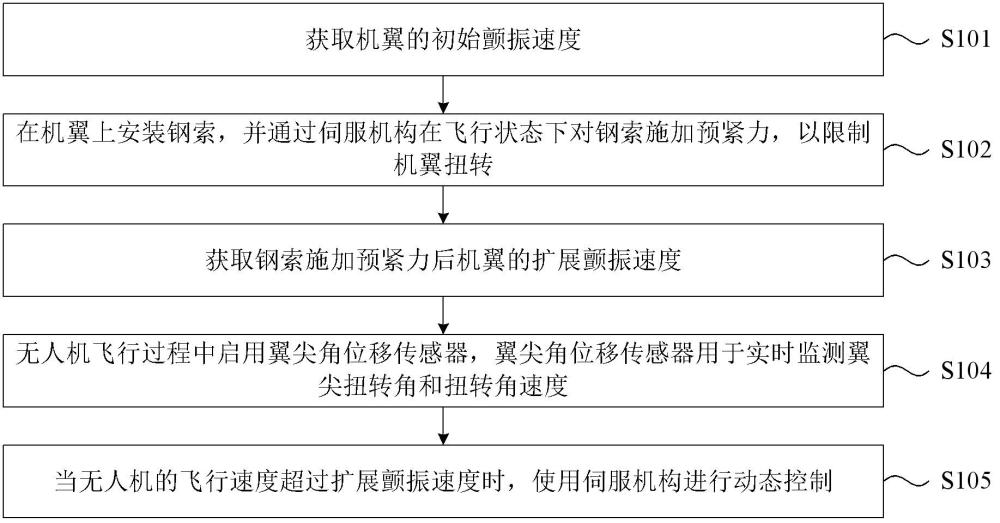
2、第一方面,本申请实施例提供了一种大展弦比机翼颤振控制方法,包括:获取机翼的初始颤振速度;在机翼上安装钢索,并通过伺服机构在飞行状态下对钢索施加预紧力,以限制机翼扭转;获取钢索施加预紧力后机翼的扩展颤振速度;无人机飞行过程中启用翼尖角位移传感器,翼尖角位移传感器用于实时监测翼尖扭转角和扭转角速度;当无人机的飞行速度超过扩展颤振速度时,使用伺服机构进行动态控制。
3、在一种可能的实现方式中,所述无人机飞行过程中启用翼尖角位移传感器,包括:当无人机的飞行速度位于初始颤振速度和扩展颤振速度之间时,开始启用翼尖角位移传感器。
4、在一种可能的实现方式中,当无人机的飞行速度低于扩展颤振速度时,基于翼尖角位移传感器监测的翼尖扭转角和扭转角速度判断所述翼尖角位移传感器是否故障。
5、在一种可能的实现方式中,若翼尖角位移传感器故障,限制无人机的飞行速度,使其始终不高于扩展颤振速度。
6、在一种可能的实现方式中,判定翼尖角位移传感器故障的方式为:当无人机的飞行速度低于扩展颤振速度时,若翼尖角位移超过无人机在静载荷下产生的机翼最大角位移,判定翼尖角位移传感器出现故障。
7、在一种可能的实现方式中,所述当无人机的飞行速度超过扩展颤振速度时,使用伺服机构进行动态控制,包括:当翼尖前缘向上时,下伺服电机牵拉钢索,施加第一牵拉力,所述第一牵拉力基于扭转角和扭转角速度获得;当翼尖前缘向下时,上伺服电机牵拉钢索,施加一个第二牵拉力,所述第二牵拉力基于扭转角和扭转角速度获得。
8、在一种可能的实现方式中,还包括:当翼尖角位移传感器监测到翼尖振动有发散趋势时,降低无人机的飞行速度。
9、在一种可能的实现方式中,判定翼尖角位移传感器监测到翼尖振动有发散趋势需满足以下任一条件:第一条件:翼尖角位移达到或超过无人机在静载荷下产生的机翼最大角位移的预设比例;第二条件:翼尖角位移在连续预设数量个振动周期中,首末周期的振幅比例超出预设比值。
10、第二方面,本申请实施例提供了一种大展弦比机翼颤振控制方法的控制装置,包括翼梢小翼、耳环螺栓、翼尖角位移传感器和伺服机构;两个翼梢小翼分别设置于无人机两侧的机翼翼尖,沿垂直机翼水平基准面向上下延伸,用于减阻并提供后缘牵引钢索的安装结构;两个耳环螺栓分别设置于单侧翼梢小翼的后缘,用于连接并牵引钢索;每个机翼翼尖都安装有一个翼尖角位移传感器,用于实时监测翼尖扭转角和扭转角速度;伺服机构包括左上伺服机构、左下伺服机构、右上伺服机构和右下伺服机构,对称设置于无人机后机身,每个伺服机构均包括伺服电机和收索盒,用于牵引从耳环螺栓上牵出的钢索。
11、在一种可能的实现方式中,从左侧机翼翼尖上的耳环螺栓牵出的钢索固定于左上伺服机构的收索盒中,从左侧机翼翼尖下的耳环螺栓牵出的钢索固定于左下伺服机构的收索盒中;从右侧机翼翼尖上的耳环螺栓牵出的钢索固定于右上伺服机构的收索盒中,从右侧机翼翼尖下的耳环螺栓牵出的钢索固定于右下伺服机构的收索盒中。
12、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果:
13、本申请实施例提供了一种大展弦比机翼颤振控制方法,通过在机翼上安装钢索并施加预紧力,有效限制了机翼在飞行过程中的扭转,显著提升了机翼的结构刚性和动态稳定性。通过限制机翼扭转,提高了机翼的扭转振动频率,从而实现了扩展颤振速度的提升,意味着无人机可以在一个更宽广的速度范围内安全飞行,而不会触发颤振现象。启用翼尖角位移传感器,能够实时监测翼尖的扭转角和扭转角速度,提供了关键数据支持。一旦检测到异常扭转情况,可以立即采取措施进行调整。这种实时监控机制极大增强了飞行的安全性和可靠性。当无人机的飞行速度超过扩展颤振速度时,利用伺服机构进行动态控制,可以进一步调整机翼状态,保持飞行稳定。这种动态响应能力不仅提高了无人机的飞行性能,还增强了其在极端条件下的适应性和生存能力。解决了如何提高颤振速度,使无人机在更高的速度下安全飞行,从而提高其飞行性能的问题。
技术特征:
1.一种大展弦比机翼颤振控制方法,其特征在于,包括:
2.根据权利要求1所述的大展弦比机翼颤振控制方法,其特征在于,所述无人机飞行过程中启用翼尖角位移传感器,包括:
3.根据权利要求1所述的大展弦比机翼颤振控制方法,其特征在于,当无人机的飞行速度低于扩展颤振速度时,基于翼尖角位移传感器监测的翼尖扭转角和扭转角速度判断所述翼尖角位移传感器是否故障。
4.根据权利要求3所述的大展弦比机翼颤振控制方法,其特征在于,若翼尖角位移传感器故障,限制无人机的飞行速度,使其始终不高于扩展颤振速度。
5.根据权利要求3所述的大展弦比机翼颤振控制方法,其特征在于,判定翼尖角位移传感器故障的方式为:当无人机的飞行速度低于扩展颤振速度时,若翼尖角位移超过无人机在静载荷下产生的机翼最大角位移,判定翼尖角位移传感器出现故障。
6.根据权利要求1所述的大展弦比机翼颤振控制方法,其特征在于,所述当无人机的飞行速度超过扩展颤振速度时,使用伺服机构进行动态控制,包括:
7.根据权利要求1所述的大展弦比机翼颤振控制方法,其特征在于,还包括:当翼尖角位移传感器监测到翼尖振动有发散趋势时,降低无人机的飞行速度。
8.根据权利要求7所述的大展弦比机翼颤振控制方法,其特征在于,判定翼尖角位移传感器监测到翼尖振动有发散趋势需满足以下任一条件:
9.根据权利要求1-8中任意一项所述的大展弦比机翼颤振控制方法的控制装置,其特征在于,包括翼梢小翼、耳环螺栓、翼尖角位移传感器和伺服机构;
10.根据权利要求9中所述的大展弦比机翼颤振控制方法的控制装置,其特征在于,从左侧机翼翼尖上的耳环螺栓牵出的钢索固定于左上伺服机构的收索盒中,从左侧机翼翼尖下的耳环螺栓牵出的钢索固定于左下伺服机构的收索盒中;
技术总结
本申请公开了一种大展弦比机翼颤振控制方法及其控制装置,包括:获取机翼的初始颤振速度;在机翼上安装钢索,并通过伺服机构在飞行状态下对钢索施加预紧力,以限制机翼扭转;获取钢索施加预紧力后机翼的扩展颤振速度;无人机飞行过程中启用翼尖角位移传感器,翼尖角位移传感器用于实时监测翼尖扭转角和扭转角速度;当无人机的飞行速度超过扩展颤振速度时,使用伺服机构进行动态控制。解决了如何提高颤振速度,使无人机在更高的速度下安全飞行,从而提高其飞行性能的问题。
技术研发人员:张海东,陈媛,李梅,沈洋,李潘玉
受保护的技术使用者:西安羚控电子科技有限公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!