一种基于加速度传感器与视觉融合的机载应急降落系统的制作方法
本发明涉及无人机,特别涉及一种基于加速度传感器与视觉融合的机载应急降落系统。
背景技术:
1、随着无人机技术的快速发展和广泛应用,尤其是在商业、农业、物流和公共安全等领域,确保无人机在飞行过程中的安全性变得尤为重要。机载降落伞系统能够在无人机遇到突发故障,例如动力系统失效、飞控系统故障等,提供一种有效的应急降落方案,降低坠毁对人员和财产的潜在威胁。在一些特殊场景下,如自然灾害、火灾监测等,机载降落伞可以帮助无人机在执行任务时快速、安全地返回地面,确保设备和数据的安全,同时为应急响应提供支持。
2、然而,现有的机载降落伞系统存在着诸多缺点,以大疆无人机为例:由于psdk接口的占用,大疆无人机无法同时通过该接口挂载其他终端设备,这直接影响了其实现5g网联、视频图传和数据传输控制的能力。这种局限性不仅降低了无人机在复杂环境下的操作灵活性,也限制了其在实时数据传输和远程控制方面的应用潜力。因此,亟需探索新的解决方案,确保在保障安全的同时,提升其多功能集成能力,从而满足日益增长的市场需求和技术发展趋势。
3、由于现有机载降落伞系统采用了通过psdk接口直接连接降落伞负载的方式,以获取飞机的飞行状态信息。这一方法结合了无人机自身的加速度传感器,能够在遇到紧急情况时及时判断并触发降落伞的开伞机制。然而,这种设计存在一个显著的缺陷,即该接口占用了终端的图传和数传通道,限制了无人机的多功能性。
技术实现思路
1、为解决上述问题,本发明旨在提出一种基于加速度传感器与视觉融合的机载应急降落系统,通过使用加速度传感器监测无人机的加速度变化,并结合云台摄像机的云台视频数据,实现对飞行状态的精确监控和判断;加速度传感器以及云台视频画面均可触发自动开伞机制,可以确保在各种紧急情况下能够迅速、安全地启动降落伞。
2、为达到上述目的,本发明的技术方案是这样实现的:
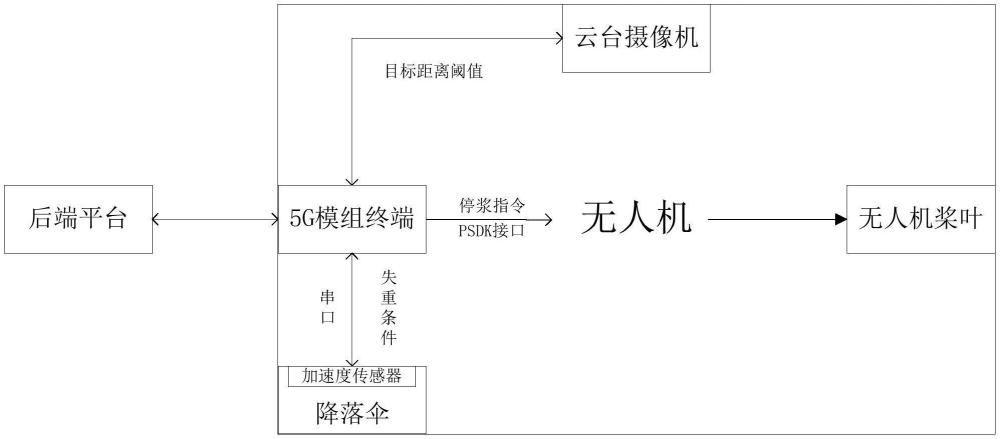
3、一种基于加速度传感器与视觉融合的机载应急降落系统,包括安装有降落伞以及云台摄像机的无人机,所述无人机上安装有5g模组终端,所述降落伞内置有加速度传感器并通过5g模组终端供电,所述云台摄像机通过5g模组终端与后端平台相连用于输出云台视频画面,所述降落伞通过加速度传感器、云台视频画面触发自动开伞机制。
4、进一步的,所述降落伞通过加速度传感器触发自动开伞机制具体为:5g模组终端给降落伞供电,当降落伞上电后,内置的加速度传感器会实时测量加速度值;当触发失重条件,降落伞将自动开伞。
5、进一步的,所述失重条件为失重达到0.5个重力加速度并持续1秒。
6、进一步的,所述5g模组终端与降落伞通过串口连接,当5g模组终端通过串口返回开伞状态时,5g模组终端通过psdk接口发送停桨指令给无人机。
7、进一步的,所述降落伞通过云台视频画面触发自动开伞机制具体为:无人机上的云台摄像机捕捉的云台视频画面通过5g模组终端实时传送至后端平台,后端平台上部署有depthfm图像深度估计算法;当检测到画面中最近的障碍物目标低于预设的目标距离阈值时,平台将发送开伞命令至5g模组终端,5g模组终端通过与降落伞的串口连接,将“开伞”指令发送给降落伞,同时通过psdk接口发送“停桨”指令给无人机,使无人机的桨叶停止转动。
8、进一步的,所述目标距离阈值为2米。
9、进一步的,所述depthfm图像深度估计算法进行图像预测深度-目标距离过程如下:在获得图像与深度配对的基础上,结合图像的条件信号与目标深度场之间的内在关系;x1表示潜在空间中编码的深度样本,而起始点x0对应于相应图像的编码表示;在数据样本周围进行平滑处理,以获得相应的数据分布
10、
11、高斯流通过以下方程定义:
12、
13、ut(x|z)=x1-x0,
14、φt(x|z)=tx1+(1-t)x0
15、尽管x0和x1属于不同的模态和数据流形,但由于图像到深度的配对关系,p(x0)和p(x1)之间的最优传输条件天然得到满足;解决了在流匹配范式中图像到深度转换过程中的动态最优传输问题,确保了更稳定和更快速的训练;在这种设置下,损失函数的形式为:
16、
17、在两个合成数据集上训练了我们的深度估计模型,分别是kitti公开数据集和dbad无人机空对地视角图像数据集;为了全面评估其性能,将真实深度表示为d,预测深度表示为;评估指标包括平均相对误差,其计算公式为:
18、
19、以及δ1精度衡量满足条件的比例。
20、有益效果:本发明通过使用加速度传感器监测无人机的加速度变化,并结合云台摄像机的云台视频数据,实现对飞行状态的精确监控和判断;加速度传感器以及云台视频画面均可触发自动开伞机制,可以确保在各种紧急情况下能够迅速、安全地启动降落伞。
技术特征:
1.一种基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,包括安装有降落伞以及云台摄像机的无人机,所述无人机上安装有5g模组终端,所述降落伞内置有加速度传感器并通过5g模组终端供电,所述云台摄像机通过5g模组终端与后端平台相连用于输出云台视频画面,所述降落伞通过加速度传感器、云台视频画面触发自动开伞机制。
2.根据权利要求1所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述降落伞通过加速度传感器触发自动开伞机制具体为:5g模组终端给降落伞供电,当降落伞上电后,内置的加速度传感器会实时测量加速度值;当触发失重条件,降落伞将自动开伞。
3.根据权利要求2所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述失重条件为失重达到0.5个重力加速度并持续1秒。
4.根据权利要求2所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述5g模组终端与降落伞通过串口连接,当5g模组终端通过串口返回开伞状态时,5g模组终端通过psdk接口发送停桨指令给无人机。
5.根据权利要求1所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述降落伞通过云台视频画面触发自动开伞机制具体为:无人机上的云台摄像机捕捉的云台视频画面通过5g模组终端实时传送至后端平台,后端平台上部署有depthfm图像深度估计算法;当检测到画面中最近的障碍物目标低于预设的目标距离阈值时,平台将发送开伞命令至5g模组终端,5g模组终端通过与降落伞的串口连接,将“开伞”指令发送给降落伞,同时通过psdk接口发送“停桨”指令给无人机,使无人机的桨叶停止转动。
6.根据权利要求5所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述目标距离阈值为2米。
7.根据权利要求5所述的基于加速度传感器与视觉融合的机载应急降落系统,其特征在于,所述depthfm图像深度估计算法进行图像预测深度-目标距离过程如下:在获得图像与深度配对的基础上,结合图像的条件信号与目标深度场之间的内在关系;x1表示潜在空间中编码的深度样本,而起始点x0对应于相应图像的编码表示;在数据样本周围进行平滑处理,以获得相应的数据分布
技术总结
本发明提供了一种基于加速度传感器与视觉融合的机载应急降落系统,无人机上安装有5G模组终端,降落伞内置有加速度传感器并通过5G模组终端供电,云台摄像机通过5G模组终端与后端平台相连用于输出云台视频画面,降落伞通过加速度传感器、云台视频画面触发自动开伞机制。本发明通过使用加速度传感器监测无人机的加速度变化,并结合云台摄像机的云台视频数据,实现对飞行状态的精确监控和判断;加速度传感器以及云台视频画面均可触发自动开伞机制,可以确保在各种紧急情况下能够迅速、安全地启动降落伞;通过5G模组终端的挂载,用户可以实现5G网联功能,同时外扩降落伞的设计确保了无人机在飞行过程中具备应急降落的能力。
技术研发人员:鲁琦
受保护的技术使用者:天翼物联科技有限公司
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!