一种无人机的快速锁紧机构的制作方法
本技术涉及无人机,尤其涉及一种无人机的快速锁紧机构。
背景技术:
1、流无人机是一种用于物流和快递等应用场景的无人机,具有大载重能力和多旋翼设计等特点。这种无人机能够快速、准确地投递包裹和货物,提高了物流效率,减少了人力和物力的投入,但是物流无人机在装载货物时通常固定较为麻烦。
2、中国专利授权公告号:cn213705778u,提供了一种无人机快速固定的机构,该方案通过该无人机快速固定的机构包括固定底板、鞋套固定筒和鞋套固定带;所述固定底板为长方形板体,其四角处固定设有两个鞋套固定筒和两个鞋套固定带,鞋套固定筒和鞋套固定带同轴设置,且鞋套固定筒和鞋套固定带能够相互配合对无人机支架的杆体进行固定;所述鞋套固定筒为水平设置的筒体,其顶部和一侧开口;所述鞋套固定带由固定座、固定带和锁紧件构成,固定座与固定底板固定连接,固定带的一端与固定座连接,另一端能够弯折插入固定座内,并通过固定座中心处的锁紧件定位能够对无人机进行快速而稳定的固定,以满足移动或运输需求,且整体结构简单,适用于多种无人机机型,但是,在物流无人机运输货物时对货物较难固定锁紧,通常需要进行反复的操作,将货物卸下时也需要反复的进行操作才可以,工作效率低。
3、因此,有必要提供一种无人机的快速锁紧机构解决上述技术问题。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种无人机的快速锁紧机构。
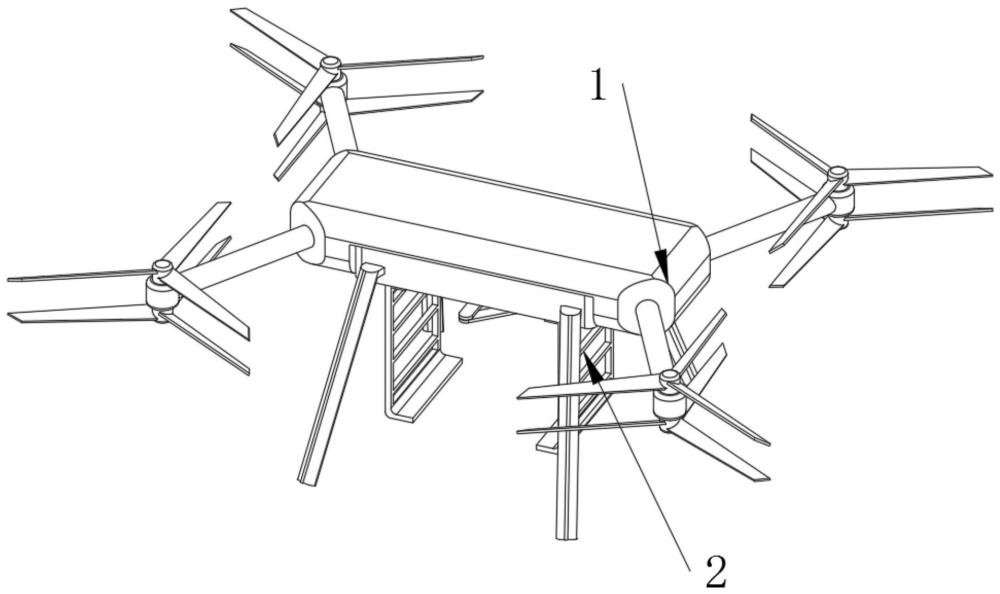
2、本实用新型提供的一种无人机的快速锁紧机构,包括:无人机主体及其元器件,所述无人机主体及其元器件的下端设有快速锁紧货物组件;
3、所述快速锁紧货物组件包括固定连接在无人机主体及其元器件下端的安装外壳,所述安装外壳的中部固定连接有两对相互对称的支撑腿,所述安装外壳的内部固定连接有伺服电机,所述伺服电机的输出端固定连接有蜗杆,所述安装外壳的内部还转动连接有转动轴,且转动轴的中部固定连接有蜗轮,所述蜗轮与蜗杆啮合连接。
4、优选的,所述转动轴的中部且位于安装外壳的外侧固定连接有转动杆,所述转动杆的两端均铰接有连接杆,一对所述连接杆呈相反设置。
5、优选的,所述安装外壳的下端滑动连接有一对相互对称的锁紧板,一对所述锁紧板分别与一对连接杆的一端铰接。
6、优选的,一对所述锁紧板的上端均固定连接有一对相互对称的滑动限位块,所述安装外壳的下端开设有两对配合滑动限位块滑动连接的滑动槽。
7、优选的,一对所述锁紧板均呈镂空设置。
8、优选的,一对所述锁紧板的整体形状呈c字形设置。
9、与相关技术相比较,本实用新型提供的一种无人机的快速锁紧机构有如下
10、有益效果:
11、1、一种无人机的快速锁紧机构,通过快速锁紧货物组件各个零件之间的相互配合,可快速对需要运载的物流货物进行夹持锁紧,无需借助其他工具便可完成,操作简单快捷,工作效率高。
12、2、一种无人机的快速锁紧机构,通过将伺服电机与无人机主体及其元器件的内部系统进行连接,通过无人机控制器驱动伺服电机正反转,以此来实现远程操控无人机下货,无需人工干预,实现了更加方便的对锁紧固定后的货物进行拆卸。
技术特征:
1.一种无人机的快速锁紧机构,其特征在于,包括:无人机主体及其元器件(1),所述无人机主体及其元器件(1)的下端设有快速锁紧货物组件(2);
2.根据权利要求1所述的一种无人机的快速锁紧机构,其特征在于,所述转动轴的中部且位于安装外壳(201)的外侧固定连接有转动杆(206),所述转动杆(206)的两端均铰接有连接杆(207),一对所述连接杆(207)呈相反设置。
3.根据权利要求2所述的一种无人机的快速锁紧机构,其特征在于,所述安装外壳(201)的下端滑动连接有一对相互对称的锁紧板(208),一对所述锁紧板(208)分别与一对连接杆(207)的一端铰接。
4.根据权利要求3所述的一种无人机的快速锁紧机构,其特征在于,一对所述锁紧板(208)的上端均固定连接有一对相互对称的滑动限位块,所述安装外壳(201)的下端开设有两对配合滑动限位块滑动连接的滑动槽。
5.根据权利要求4所述的一种无人机的快速锁紧机构,其特征在于,一对所述锁紧板(208)均呈镂空设置。
6.根据权利要求5所述的一种无人机的快速锁紧机构,其特征在于,一对所述锁紧板(208)的整体形状呈c字形设置。
技术总结
本技术提供的一种无人机的快速锁紧机构,属于无人机技术领域,一种无人机的快速锁紧机构,包括:无人机主体及其元器件,无人机主体及其元器件的下端设有快速锁紧货物组件,快速锁紧货物组件包括固定连接在无人机主体及其元器件下端的安装外壳,安装外壳的中部固定连接有两对相互对称的支撑腿,它可实现通过快速锁紧货物组件各个零件之间的相互配合,可快速对需要运载的物流货物进行夹持锁紧,无需借助其他工具便可完成,操作简单快捷,工作效率高,通过将伺服电机与无人机主体及其元器件的内部系统进行连接,通过无人机控制器驱动伺服电机正反转,以此来实现远程操控无人机下货,无需人工干预,实现了更加方便的对锁紧固定后的货物进行拆卸。
技术研发人员:曾少波,倪晓军,贺昌,杨程,童成曦
受保护的技术使用者:长沙君天信息技术有限公司
技术研发日:20240129
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!