一种随动控制的低重力模拟装置的制作方法
本技术涉及航空模拟,具体涉及一种随动控制的低重力模拟装置。
背景技术:
1、目前,随着航天空技术的发展,所有的载人空间探索活动不仅需要在航天工程上进一步创新发展,还需要对宇航员进行训练,以帮助其熟悉在太空或外星球执行任务的微重力或低重力环境。
2、在实际的航天环境中工作时,宇航员需要在失重环境下对工具进行操作,亦或是对固定的操作设备进行作业,因此,需要一种能够模拟上述情况的低重力模拟装置,以进行工效学测试,
3、现有技术中又公开了一种多自由度运动模拟平台,公开号为cn115019596a,包括包括绳索、钢架、导向装置、吊机机构以及负载舱,所述钢架的上下两端各安装有四套间隔90°的吊机机构,所述导向装置分别安装在钢架的上下两端并对应位于所述吊机机构的前方,所述绳索采用空间对称的上四下四方式布局,每根所述绳索的一端缠绕在所述吊机机构上,另一端绕过所述导向装置连接在所述负载舱上,所述负载舱随着八根所述绳索伸缩长度的改变,在三维空间内实现x轴、y轴、z轴、俯仰、横滚五个自由度运动,该实验装置虽克服传统模拟方法工作空间受限制的问题,能够实现零重力或低重力环境下模拟负载平台的运动控制和受力模拟,该种方式无法满足地面支撑和约束等情况下宇航员的操作姿态的模拟,不利于工效学测试的展开。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种随动控制的低重力模拟装置。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种随动控制的低重力模拟装置,包括:
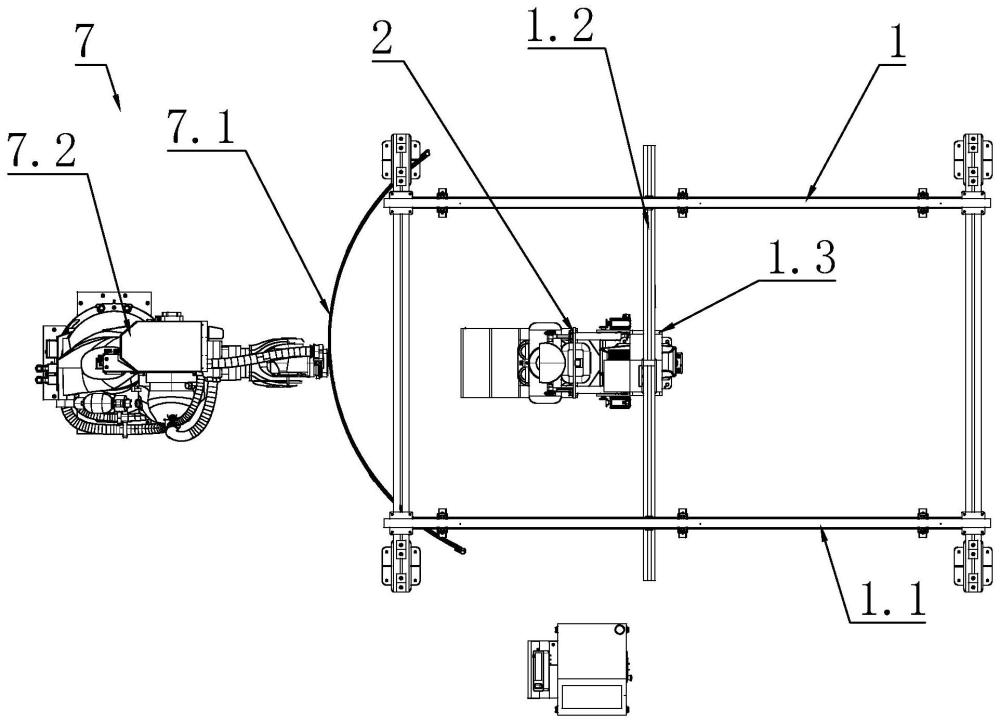
3、随动行架,包括x轴轨道,以及被设置为沿x轴轨道滑动的y轴轨道,所述y轴轨道上可滑动的设有z轴支撑架,所述z轴支撑架底部延伸有z轴轨道;
4、测试架组件,用于连接和约束舱服的连接架,以及活动设置于连接架上的传动架,所述传动架滑动设置于z轴轨道上;
5、随动组件,包括连接于z轴支撑架与传动架之间的z轴补偿组件,连接于传动架与连接架之间的y轴补偿组件,以及设置在连接架上的多个x轴补偿组件,所述x轴补偿组件连接于舱服两侧,并靠近舱服的肩部和/或腰部布置。
6、进一步,所述随动行架前部还设有环境模拟组件,所述环境模拟组件包括机械手,以及设置在机械手驱动端上的舱板,所述舱板面向测试架组件设置。
7、进一步,所述y轴轨道上还设有可滑动的弹簧平衡器,所述弹簧平衡器用于吊装作业工具。
8、进一步,所述x轴补偿组件包括布置在连接架上的多个直线电缸,所述直线电缸关于x轴布置,且所述直线电缸的动作端上设有转接座,所述转接座与外舱服连接,并与直线电缸的输出端围绕z轴铰接。
9、进一步,所述y轴补偿组件包括设置在传动架上的伺服电机,以及设置于连接架上的y向连接轴,所述y向连接轴与伺服电机之间连接有齿轮传动系,以致动所述连接架相对传动架围绕y轴转动。
10、进一步,所述z轴补偿组件包括电动平衡器和z轴旋转模组,所述电动平衡器上端连接在z轴支撑架的顶部,其下端连接传动架,并牵引传动架保持在平衡位置,所述z轴旋转模组固定在z轴支撑架的底部,且所述z轴旋转模组的动作端连接z轴轨道,并致动z轴轨道转动。
11、进一步,所述连接架匹配外舱服设置,且所述连接架底部设有用于支撑和约束外舱服底部的支承板。
12、进一步,所述支承板可转动的连接在连接架的底部,且所述x轴补偿组件随宇航员的两侧动作而补偿动作,所述支承板支撑外舱服并随两侧的x轴补偿组件和宇航员动作而相对连接架转动。
13、进一步,所述测试架组件还包括设置在连接架上的六维传感器,所述六维传感器连接有控制器,所述控制器与随动组件控制连接,所述六维力传感器接收舱服的载荷,并通过控制器控制随动组件补偿动作。
14、进一步,所述外舱服上连接有急停按钮。
15、与现有技术相比,本实用新型具有以下优点和有益效果:
16、1、本实用新型的通过在随动行架的前部设置舱板,舱板由机械手控制与测试架的相对位置,舱板还可作为航天设备的模拟,在测试架的顶部通过弹簧平衡器悬挂操作工具,以满足宇航员在不同位姿下对工具的操作,以及与航天设备的交互作业,从而有效的进行工效学测试,并实现对局部空间环境的模拟,在测试过程中,可通过机械手调节舱板姿态,以辅助宇航员与设备的相对位姿,满足不同工况下的工效学测试;
17、2、测试架组件通过连接架为宇航员提供底部支撑,提供宇航员在失重环境下以腿部支承和约束状态下的作业模拟,并通过y轴补偿组件实现连接架相对于传动架在y轴上的转动,通过z轴补偿组件提供宇航员的悬浮,以及在z轴上的转动,并通过x轴补偿组件实现宇航员在失重状态下的姿态随动调整和动作补偿,以满足身体与操作空间和待测设备不同相对位姿、身体不同约束的情况下的模拟,该装置主要为工效学测试试验提供身体位姿模拟支持,能够满足地面支撑、约束等情况下宇航员的空间操作姿态,支持开展工效学测试。
技术特征:
1.一种随动控制的低重力模拟装置,其特征在于,包括:
2.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述随动行架(1)前部还设有环境模拟组件(7),所述环境模拟组件(7)包括机械手(7.2),以及设置在机械手(7.2)驱动端上的舱板(7.1),所述舱板(7.1)面向测试架组件设置。
3.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述y轴轨道(1.2)上还设有可滑动的弹簧平衡器(8),所述弹簧平衡器(8)用于吊装作业工具。
4.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述x轴补偿组件(4)包括布置在连接架(2)上的多个直线电缸(4.1),所述直线电缸(4.1)关于x轴布置,且所述直线电缸(4.1)的动作端上设有转接座(4.2),所述转接座(4.2)与外舱服(9)连接,并与直线电缸(4.1)的输出端围绕z轴铰接。
5.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述y轴补偿组件(5)包括设置在传动架(3)上的伺服电机(5.1),以及设置于连接架(2)上的y向连接轴(5.2),所述y向连接轴(5.2)与伺服电机(5.1)之间连接有齿轮传动系(5.3),以致动所述连接架(2)相对传动架(3)围绕y轴转动。
6.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述z轴补偿组件(6)包括电动平衡器(6.1)和z轴旋转模组(6.2),所述电动平衡器(6.1)上端连接在z轴支撑架(1.3)的顶部,其下端连接传动架(3),并牵引传动架(3)保持在平衡位置,所述z轴旋转模组(6.2)固定在z轴支撑架(1.3)的底部,且所述z轴旋转模组(6.2)的动作端连接z轴轨道(1.4),并致动z轴轨道(1.4)转动。
7.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述连接架(2)匹配外舱服(9)设置,且所述连接架(2)底部设有用于支撑和约束外舱服(9)底部的支承板(2.1)。
8.如权利要求7所述的一种随动控制的低重力模拟装置,其特征在于:所述支承板(2.1)可转动的连接在连接架(2)的底部,且所述x轴补偿组件(4)随宇航员的两侧动作而补偿动作,所述支承板(2.1)支撑外舱服(9)并随两侧的x轴补偿组件(4)和宇航员动作而相对连接架(2)转动。
9.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述外舱服(9)上连接有急停按钮(9.1)。
10.如权利要求1所述的一种随动控制的低重力模拟装置,其特征在于:所述测试架组件还包括设置在连接架(2)上的六维传感器,所述六维传感器连接有控制器,所述控制器与随动组件控制连接,所述六维力传感器(12)接收舱服的载荷,并通过控制器控制随动组件补偿动作。
技术总结
本技术公开了一种随动控制的低重力模拟装置,包括:随动行架,包括X轴轨道,以及被设置为沿X轴轨道滑动的Y轴轨道,所述Y轴轨道上可滑动的设有Z轴支撑架,所述Z轴支撑架底部延伸有Z轴轨道;测试架组件,用于连接和约束舱服的连接架,以及活动设置于连接架上的传动架,所述传动架滑动设置于Z轴轨道上;随动组件,包括连接于Z轴支撑架与传动架之间的Z轴补偿组件,连接于传动架与连接架之间的Y轴补偿组件,以及设置在连接架上的多个X轴补偿组件,所述X轴补偿组件连接于舱服两侧,并靠近舱服的肩部和/或腰部布置。
技术研发人员:李翔,徐坚磊,鞠立涛,范俊伟,王昊,刁常堃,孟令子,王羽白,宋子良,吴意
受保护的技术使用者:浙江航工智能科技集团有限公司
技术研发日:20240131
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!