一种四旋翼无人机的制作方法
本申请涉及无人机领域,特别涉及一种四旋翼无人机。
背景技术:
1、随着自动控制领域的技术发展,近年来,无人机以其简单的结构、方便的操作以及自主的运行等特点受到越来越多的重视,其不仅能够取代人完成一些简单的重复性劳动,如农业灌溉、定点巡逻、快递投放等,还能够在未知的复杂环境或危险环境中替代人完成具有危险性或者特殊难度的任务。
2、然而,现有的无人机的旋转叶片和控制主件(如飞行控制器和机载计算机)的外部通常没有设置保护机制,特别是当将无人机用于探索无gps信号的未知封闭空间时,无人机容易存在没有规避障碍物而撞机,以使无人机的主要部件直接被碰撞损坏。
3、因此,现有技术仍有待于改进。
技术实现思路
1、本申请的目的在于提供一种四旋翼无人机,以解决现有无人机的旋转叶片和控制主件的外部通常没有设置保护机制,特别是当将无人机用于探索无gps信号的未知封闭空间时,无人机容易存在没有规避障碍物而撞机,以使无人机的主要部件直接被碰撞损坏的问题。
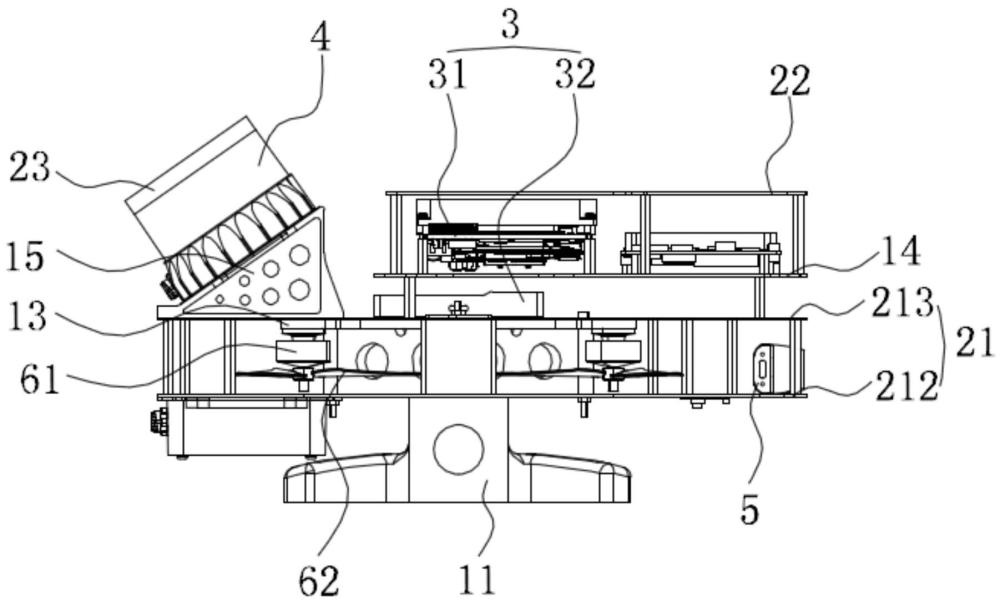
2、为实现上述目的,本申请实施例提供了一种四旋翼无人机,包括:
3、起落架;
4、保护架,其设置于所述起落架上;
5、包围环座,其设置于所述保护架内,并通过所述保护架与所述起落架连接;
6、控制模块,其设置于所述保护架的上表面上;
7、激光雷达传感器,其设置于所述保护架的上表面上,并位于所述控制模块的一侧;
8、视觉传感器,其设置于所述保护架内;
9、动力组件,其设置于所述保护架内;
10、第一保护盖,其设置于所述保护架上,并覆盖所述控制模块;
11、第二保护盖,其设置于所述激光雷达的上表面上。
12、根据以上所述的四旋翼无人机,所述起落架上开设有电池仓,所述电池仓与所述起落架一体化设置。
13、根据以上所述的四旋翼无人机,所述保护架内开设有视觉传感器保护框,所述视觉传感器保护框与所述保护架一体化设置。
14、根据以上所述的四旋翼无人机,所述包围环座上开设有若干个散热孔和电机线预留孔。
15、根据以上所述的四旋翼无人机,所述动力组件包括四个电机和四个螺旋桨,四个所述电机的固定端均匀分布设置于所述保护架的内顶面上,并位于所述包围环座的周侧,四个所述螺旋桨分别与四个所述电机的驱动端连接,并悬空设置于所述保护架内。
16、根据以上所述的四旋翼无人机,所述保护架的内顶面上设置有第一安装板,四个所述电机的固定端安装于所述第一安装板上。
17、根据以上所述的四旋翼无人机,所述保护架上设置有第二安装板,所述第二安装板上预留设置有多个不同的孔位。
18、根据以上所述的四旋翼无人机,所述四旋翼无人机还包括两个辅助照明灯,两个所述辅助照明灯设置于所述保护架内,并位于所述视觉传感器的两侧。
19、根据以上所述的四旋翼无人机,所述控制模块包括机载计算机和飞行控制器,所述机载计算机设置于所述第二安装板上,所述飞行控制器设置于所述保护架上,所述机载计算机分别与所述飞行控制器、所述激光雷达传感器和所述视觉传感器电连接。
20、本申请提供的一种四旋翼无人机的有益效果至少在于:
21、本申请通过设置保护架,以将视觉传感器和动力组件安装于保护架内,通过设置第一保护盖和第二保护盖,以将控制模块和激光雷达传感器分别安装在第一保护盖和第二保护盖下,这样当无人机在探索无gps信号的未知封闭空间的过程中因没有及时规避障碍物而撞机时,该无人机的主要部件(视觉传感器、动力组件、控制模块和激光雷达传感器)不会直接被碰撞,从而可以减轻无人机撞机时其上的主要部件所受到的影响。
技术特征:
1.一种四旋翼无人机,其特征在于,包括:
2.根据权利要求1所述的四旋翼无人机,其特征在于,所述起落架上开设有电池仓,所述电池仓与所述起落架一体化设置。
3.根据权利要求1所述的四旋翼无人机,其特征在于,所述保护架内开设有视觉传感器保护框,所述视觉传感器保护框与所述保护架一体化设置。
4.根据权利要求1所述的四旋翼无人机,其特征在于,所述包围环座上开设有若干个散热孔和电机线预留孔。
5.根据权利要求1所述的四旋翼无人机,其特征在于,所述动力组件包括四个电机和四个螺旋桨,四个所述电机的固定端均匀分布设置于所述保护架的内顶面上,并位于所述包围环座的周侧,四个所述螺旋桨分别与四个所述电机的驱动端连接,并悬空设置于所述保护架内。
6.根据权利要求5所述的四旋翼无人机,其特征在于,所述保护架的内顶面上设置有第一安装板,四个所述电机的固定端安装于所述第一安装板上。
7.根据权利要求1所述的四旋翼无人机,其特征在于,所述保护架上设置有第二安装板,所述第二安装板上预留设置有多个不同的孔位。
8.根据权利要求1所述的四旋翼无人机,其特征在于,所述四旋翼无人机还包括两个辅助照明灯,两个所述辅助照明灯设置于所述保护架内,并位于所述视觉传感器的两侧。
9.根据权利要求7所述的四旋翼无人机,其特征在于,所述控制模块包括机载计算机和飞行控制器,所述机载计算机设置于所述第二安装板上,所述飞行控制器设置于所述保护架上,所述机载计算机分别与所述飞行控制器、所述激光雷达传感器和所述视觉传感器电连接。
技术总结
本申请公开一种四旋翼无人机,涉及无人机领域,以解决现有无人机的旋转叶片和控制主件的外部通常没有设置保护机制,特别是当将无人机用于探索无GPS信号的未知封闭空间时,无人机容易存在没有规避障碍物而撞机,以使无人机的主要部件直接被碰撞损坏的问题。包括:起落架;保护架,其设置于所述起落架上;包围环座,其设置于所述保护架内,并通过所述保护架与所述起落架连接;控制模块,其设置于所述保护架的上表面上;激光雷达传感器,其设置于所述保护架的上表面上,并位于所述控制模块的一侧;视觉传感器,其设置于所述保护架内;动力组件,其设置于所述保护架内。
技术研发人员:李清泉,于文率,吴海明,钟小容,田春宝,黄奇,庄礼聪
受保护的技术使用者:人工智能与数字经济广东省实验室(深圳)
技术研发日:20240329
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!