一种扑翼机
本技术涉及仿生飞行器,更具体地,涉及一种扑翼机。
背景技术:
1、目前,扑翼机的转向结构主要取决于其设计和应用场景。扑翼机是一种仿生学飞行器,模仿鸟类或昆虫的飞行原理进行设计。
2、在扑翼机的转向结构中,通常会使用以下一些技术和设计:尾翼控制:类似于传统飞行器,扑翼机可以使用尾翼控制来实现转向。这可能涉及到水平和垂直尾翼的运动,通过改变它们的角度来产生扭转和转向力。翼端效应:一些扑翼机利用翼端效应来实现转向。通过在翼尖处产生不对称的升力分布,可以产生侧向力,从而实现转向。柔性翼面:某些扑翼机采用柔性翼面设计,通过改变翼面的形态或扭曲来实现转向。这可以通过操纵翼面的柔性材料或结构来实现。主动控制:现代扑翼机可能还配备有主动控制系统,例如电动或液压执行机构,用于实现精确的转向控制。这些系统可以根据传感器反馈或预先设定的指令来调整翼面的形态和位置,以实现所需的转向。自适应控制:一些高级扑翼机可能还采用自适应控制技术,根据飞行状态和环境条件自动调整转向结构,以优化性能和稳定性。
3、现有技术cn102862677a公开了一种双翼式微型仿生扑翼机,包括驱动机构、双扑翼机构、尾翼机构及主臂,驱动机构连接在主臂的正前端,双扑翼机构位于主臂的正上方,尾翼机构连接在主臂的正后端。驱动机构包括菱形支架、微型直流电机、齿轮减速机构和两个曲柄连杆机构,双扑翼机构包括两个对称扑翼架、四根扑翼安装杆和上下两层扑翼,尾翼机构包含电磁舵、尾翼和摆翼。微型直流电机通过齿轮减速机构和曲柄连杆机构拉动两个扑翼架上下运动,实现仿生扑翼。该技术方案中,尾翼机构中的电磁舵通过改变电流方向来控制摆翼左右摆动,从而控制扑翼机的飞行方向,但其无法控制尾翼机构的升降。
技术实现思路
1、为解决上述问题,本实用新型提出一种扑翼机,该扑翼机通过第二驱动装置对尾翼组件进行转动,实现方向的控制,同时通过第三驱动装置对尾翼组件进行升降,使得扑翼机能在爬升和滑翔的状态时变换姿态,从而使扑翼机的飞行更加灵活。
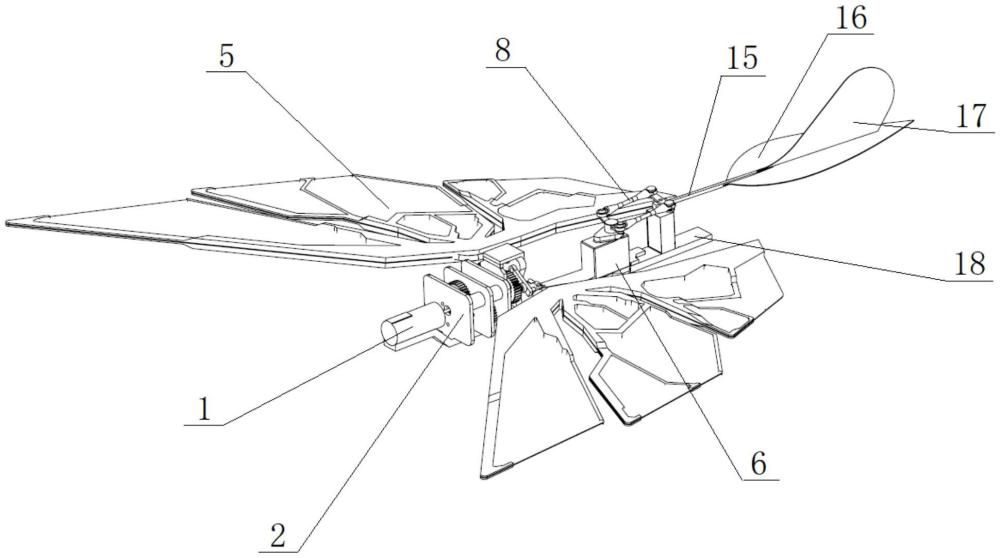
2、为达到上述目的,一种扑翼机,包括机架、主机翼组件、尾翼组件、第一驱动装置以及第二驱动装置,所述第一驱动装置固定于所述机架的一端,所述第一驱动装置的驱动端与所述主机翼组件连接用于驱动所述主机翼组件扑动,所述第二驱动装置固定于所述机架的另一端,所述第二驱动装置的驱动端与所述尾翼组件连接用于驱动所述尾翼组件转动,还包括固定于所述机架上的第三驱动装置,所述第三驱动装置设于所述第二驱动装置远离所述第一驱动装置的一侧,所述第三驱动装置与所述尾翼组件连接用于驱动所述尾翼组件上下升降。
3、本技术方案中,所述第一驱动装置驱动所述主机翼组件扑动为扑翼机提供升力,所述第二驱动装置驱动尾翼组件进行转动实现扑翼机的转向功能,所述第三驱动装置驱动尾翼组件进行升降,当尾翼组件上升时,扑翼机前进速度会变慢,升力会变大,使得扑翼机可以更快的爬升;当尾翼组件下降时,扑翼机升力减小,扑翼机向下滑翔,推力加大,使得扑翼机可以更快的滑翔。
4、作为一种优选方案,为了驱动尾翼组件转动,所述第二驱动装置包括第一舵机和传动结构,所述第一舵机固定于所述机架上,所述传动结构的一端与所述第一舵机连接,所述传动结构的另一端与所述尾翼组件的一端连接。
5、作为一种优选方案,所述传动结构包括主动杆、从动杆以及两个球铰关节,所述主动杆的中部与所述第一舵机的驱动端连接,所述尾翼组件的一端形成转动端,所述转动端居中固定在所述从动杆的中部,各所述球铰关节的两端分别与所述主动杆和从动杆的一端铰接,所述第三驱动装置与所述转动端连接,所述第三驱动装置形成限位结构以使所述尾翼组件以所述转动端为中心转动,所述主动杆、从动杆以及两个球铰关节连接形成平行摇杆机构,所述第一舵机的驱动端转动,带动所述主动杆以其中部为轴平行转动,在两个球铰关节的带动下且在限位结构的限位下,所述从动杆上的转动端转动,当所述尾翼组件在第三驱动装置的驱动下进行升降运动时球铰关节也随即上下摆动,使得尾翼组件的转动和升降互不干涉。
6、作为一种优选方案,为了驱动尾翼组件进行升降运动,所述第三驱动装置为伸缩结构,所述伸缩结构固定在所述机架上,所述伸缩结构的伸缩端与所述转动端的底部活动连接。
7、作为一种优选方案,所述伸缩结构包括具有正负极性的电磁铁和磁吸杆,所述电磁铁固定于所述机架上,所述电磁铁的顶部设有竖直的滑孔,所述滑孔内设有弹簧,所述磁吸杆的底部滑动连接在所述滑孔内,所述磁吸杆的顶部与所述转动端活动连接,所述电磁铁与所述磁吸杆磁吸耦合或相互排斥用于驱动所述磁吸杆沿所述滑孔上下滑动,当电磁铁通正向电流时,所述电磁铁与所述磁吸杆相吸,磁吸杆在滑孔中下降以带动所述转动端下降,当电磁铁通反向电流时,所述电磁铁与所述磁吸杆相斥,磁吸杆在滑孔中上升移动带动所述转动端上升,其中所述弹簧始终对磁吸杆施加向上的作用力,当电磁铁与所述磁吸杆相吸,所述弹簧被压缩,其压缩量和电流大小相关,从而实现磁吸杆在滑孔中上下位置的控制。
8、作为一种优选方案,为了使尾翼组件只能以所述转动端为中心转动,所述转动端的底部设有平行于所述机架的限位槽,所述磁吸杆的顶部设有限位部,所述限位槽与所述限位部滑动连接以限制所述转动端沿所述限位槽进行前后滑动,所述限位槽用于防止所述磁吸杆脱离转动端。
9、作为一种优选方案,所述第三驱动装置为第二舵机,所述第二舵机固定于所述机架上,用于驱动尾翼组件的升降,所述第二舵机的驱动端转动连接有连接杆,所述连接杆的一端与所述转动端的底部球铰接以使所述转动端可以进行转动,使得转动端的转动和升降互不干涉。
10、作为一种优选方案,所述尾翼组件包括尾架、垂直尾翼以及水平尾翼,所述尾架的一端形成转动端,所述尾架的另一端与所述水平尾翼的中部固定,所述垂直尾翼组件居中且竖直固定在所述水平尾翼组件上,尾架、垂直尾翼以及水平尾翼以固定的方式连接,通过转动端带动尾架、垂直尾翼以及水平尾翼同时进行转动和升降。
11、与现有技术相比,本实用新型的有益效果是:
12、1.本实用新型通过第三驱动装置带动尾翼组件进行上升或下降,使得扑翼机可以在爬升状态获得更多升力或在滑翔状态获得更多推力。
13、2.通过第一驱动装置带动主机翼组件扑动,并通过第二驱动装置和第三驱动装置分别带动尾翼组件转动和升降,使得扑翼机的飞行更加灵活。
技术特征:
1.一种扑翼机,其特征在于,包括机架(18)、主机翼组件、尾翼组件、第一驱动装置以及第二驱动装置,所述第一驱动装置固定于所述机架(18)的一端,所述第一驱动装置的驱动端与所述主机翼组件连接用于驱动所述主机翼组件扑动,所述第二驱动装置固定于所述机架(18)的另一端,所述第二驱动装置的驱动端与所述尾翼组件连接用于驱动所述尾翼组件转动,还包括固定于所述机架(18)上的第三驱动装置,所述第三驱动装置设于所述第二驱动装置远离所述第一驱动装置的一侧,所述第三驱动装置与所述尾翼组件连接用于驱动所述尾翼组件进行升降运动。
2.根据权利要求1所述的一种扑翼机,其特征在于,所述第二驱动装置包括第一舵机(6)和传动结构,所述第一舵机(6)固定于所述机架(18)上,所述传动结构的一端与所述第一舵机(6)连接,所述传动结构的另一端与所述尾翼组件的一端连接。
3.根据权利要求2所述的一种扑翼机,其特征在于,所述传动结构包括主动杆(7)、从动杆(9)以及两个球铰关节(8),所述主动杆(7)的中部与所述第一舵机(6)的驱动端连接,所述尾翼组件的一端形成有转动端(1501),所述转动端(1501)居中固定在所述从动杆(9)的中部,各所述球铰关节(8)的两端分别与所述主动杆(7)和从动杆(9)的一端铰接,所述第三驱动装置与所述转动端(1501)连接,所述第三驱动装置形成限位结构以使所述尾翼组件以所述转动端(1501)为中心转动。
4.根据权利要求3所述的一种扑翼机,其特征在于,所述第三驱动装置为伸缩结构,所述伸缩结构固定在所述机架(18)上,所述伸缩结构的伸缩端与所述转动端(1501)的底部活动连接。
5.根据权利要求4所述的一种扑翼机,其特征在于,所述伸缩结构包括具有正负极性的电磁铁(10)和磁吸杆(11),所述电磁铁(10)固定于所述机架(18)上,所述电磁铁(10)的顶部设有竖直的滑孔(1001),所述滑孔(1001)内设有弹簧(12),所述磁吸杆(11)的底部滑动连接在所述滑孔(1001)内,所述磁吸杆(11)的顶部与所述转动端(1501)活动连接,所述电磁铁(10)与所述磁吸杆(11)磁吸耦合或相互排斥用于驱动所述磁吸杆(11)沿所述滑孔(1001)上下滑动。
6.根据权利要求5所述的一种扑翼机,其特征在于,所述转动端(1501)的底部设有平行于所述机架(18)的限位槽(1502),所述磁吸杆(11)的顶部设有限位部(1101),所述限位槽(1502)与所述限位部(1101)滑动连接以限制所述转动端(1501)沿所述限位槽(1502)进行前后滑动。
7.根据权利要求3所述的一种扑翼机,其特征在于,所述第三驱动装置为第二舵机(13),所述第二舵机(13)固定于所述机架(18)上,所述第二舵机(13)的驱动端转动连接有连接杆(14),所述连接杆(14)的一端与所述转动端(1501)的底部球铰接。
8.根据权利要求3-7任一项所述的一种扑翼机,其特征在于,所述尾翼组件包括尾架(15)、垂直尾翼(17)以及水平尾翼(16),所述尾架(15)的一端形成所述转动端(1501),所述尾架(15)的另一端与所述水平尾翼(16)的中部固定,所述垂直尾翼(17)组件居中且竖直固定在所述水平尾翼(16)组件上。
9.根据权利要求1所述的一种扑翼机,其特征在于,所述第一驱动装置包括驱动电机(1)、传动机构以及减速齿轮组(2),所述驱动电机(1)的驱动端与所述减速齿轮组(2)的输入端连接,所述传动机构包括两个相啮合的从动齿轮(3)和两组连杆组(4),所述减速齿轮组(2)的输出端与其中一个所述从动齿轮(3)连接,两组所述连杆组(4)分别与所述主机翼组件的两侧连接,各组所述连杆组(4)的一端与各所述从动齿轮(3)转动连接,各组所述连杆组(4)的另一端与所述机架(18)转动连接。
10.根据权利要求9所述的一种扑翼机,其特征在于,所述主机翼组件包括两个结构相同的扑翼(5),各所述扑翼(5)的一端与各组所述连杆组(4)连接。
技术总结
本技术公开了一种扑翼机,包括机架、主机翼组件、尾翼组件、第一驱动装置以及第二驱动装置,所述第一驱动装置固定于所述机架的一端,所述第一驱动装置的驱动端与所述主机翼组件连接用于驱动所述主机翼组件扑动,所述第二驱动装置固定于所述机架的另一端,所述第二驱动装置的驱动端与所述尾翼组件连接用于驱动所述尾翼组件转动,还包括固定于所述机架上的第三驱动装置,所述第三驱动装置设于所述第二驱动装置远离所述第一驱动装置的一侧,所述第三驱动装置与所述尾翼组件连接用于驱动所述尾翼组件进行升降运动。本技术通过能通过第二驱动装置和第三驱动装置分别控制尾翼组件的转向和升降,使得扑翼机的飞行更加灵活。
技术研发人员:周迅明,王家乐,陈鸿彬,赵颖生,栾天昕,杨平
受保护的技术使用者:广东工业大学
技术研发日:20240412
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!