一种塔式起重机回转机构控制方法及系统与流程
1.本发明涉及电动机控制技术领域,特别是涉及一种塔式起重机回转机构控制方法及系统。
背景技术:
2.现有技术的塔式起重机的回转机构,其具有塔臂惯性大、塔身扭曲形变和传动机构大减速比等特点,因此容易造成大臂速度超调、振荡的弊端;而且由于回转机构存在走走停停、就位不准、停机大臂回弹、所吊重物摇晃等技术问题,使得现有技术的塔式起重机的回转机构降低了回转机构的运行效率、舒适性、可靠性和安全性。
技术实现要素:
3.本发明为了解决现有技术存在的上述问题,提供了一种塔式起重机回转机构控制方法及系统,以解决现有技术的塔式起重机回转机构存在控制不稳定的技术问题。
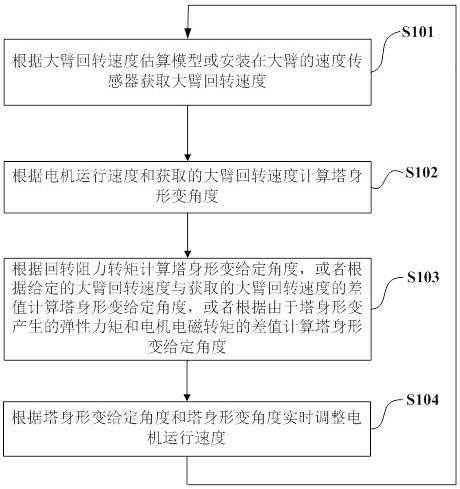
4.一种塔式起重机回转机构控制方法,其方法包括以下步骤:
5.s101、根据大臂回转速度估算模型或安装在大臂的速度传感器获取大臂回转速度;
6.s102、根据电机运行速度和获取的大臂回转速度计算塔身形变角度;
7.s103、根据回转阻力转矩计算塔身形变给定角度,或者根据给定的大臂回转速度与获取的大臂回转速度的差值计算塔身形变给定角度,或者根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度;
8.s104、根据塔身形变给定角度和塔身形变角度实时调整电机运行速度,返回至步骤s101。
9.作为本发明的进一步优选技术方案,步骤s101中根据大臂回转速度估算模型获取大臂回转速度的计算公式为:
[0010][0011]
其中,ω
d
为大臂回转速度,ω
m
为电机运行速度,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,k
f
为回转阻尼系数,k
t
为塔身抗扭曲刚度,j
d
为大臂惯量,s代表微分。
[0012]
作为本发明的进一步优选技术方案,步骤s102中根据电机运行速度和获取的大臂回转速度计算塔身形变角度的计算公式为:
[0013][0014]
其中,为塔身形变角度,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,ω
d
为大臂回转速度,ω
m
为电机运行速度。
[0015]
作为本发明的进一步优选技术方案,步骤s103中根据回转阻力转矩计算塔身形变给定角度的计算公式为:
[0016][0017]
其中,为塔身形变给定角度,k
f
为回转阻尼系数,k
t
为塔身抗扭曲刚度,为塔身形变角度。
[0018]
作为本发明的进一步优选技术方案,步骤s103中根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度的计算公式为:
[0019][0020]
其中,为塔身形变给定角度,为塔身形变角度,t
e
为电机电磁转矩,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,k
t
为塔身抗扭曲刚度。
[0021]
根据本发明的另一方面,本发明还提供了一种所述塔式起重机回转机构控制系统,该系统包括:
[0022]
大臂回转速度计算模块,用于根据大臂回转速度估算模型或安装在大臂的速度传感器获取大臂回转速度;
[0023]
塔身形变角度计算模块,用于根据电机运行速度和获取的大臂回转速度计算塔身形变角度;
[0024]
塔身形变给定角度计算模块,用于根据回转阻力转矩计算塔身形变给定角度,或根据给定的大臂回转速度与获取的大臂回转速度的差值计算塔身形变给定角度,或根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度;
[0025]
电机速度调整模块,用于根据塔身形变给定角度和塔身形变角度实时调整电机运行速度。
[0026]
本发明提出的一种塔式起重机回转机构控制方法及系统,通过包括上述技术方案,使得本发明的塔式起重机的大臂回转速度控制平稳,显著提高了回转系统运行效率和舒适性,无需涡流制动器辅助调速,并且不仅降低了系统成本,而且还减少了系统的故障点。
附图说明
[0027]
图1为塔式起重机回转机构控制方法提供的一实例的方法流程图;
[0028]
图2为未采用本发明控制方法的仿真结果;
[0029]
图3为采用本发明控制方法的仿真结果;
[0030]
图4为塔式起重机回转机构控制系统的结构框图。
具体实施方式
[0031]
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
[0032]
塔式起重机的回转机构包括大齿轮、小齿轮及减速机,大齿轮固定设置在塔式起重机的塔身上以驱动塔身转动,小齿轮与大齿轮啮合,大臂连接在塔身上并随塔身转动,减速机与小齿轮传动连接,而减速机则由电机驱动。
[0033]
如图1所示,本实施例公开了一种塔式起重机回转机构控制方法,其包括以下步骤:
[0034]
s101、根据大臂回转速度估算模型或安装在大臂的速度传感器获取大臂回转速度;
[0035]
具体的,步骤s101中,根据大臂回转速度估算模型获取大臂回转速度的计算公式为:
[0036][0037]
其中,ω
d
为大臂回转速度,ω
m
为电机运行速度,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,k
f
为回转阻尼系数,k
t
为塔身抗扭曲刚度,j
d
为大臂惯量,s代表微分。
[0038]
在此需要说明的是,式(1)中的电机运行速度以及下文所涉及的电机运行速度,均为步骤4中电机反馈的运行速度,另外,此处的电机反馈的运行速度可由电机上的编码器反馈得到,当然,还可采用其他手段反馈得到,在此不做限定,也不做具体阐述。
[0039]
步骤s101中,还可以通过安装在大臂的速度传感器获取大臂回转速度,此为现有技术,因此在此对其具体获取的方式不再赘述。
[0040]
s102、根据电机运行速度和获取的大臂回转速度计算塔身形变角度;
[0041]
具体的,步骤s102中,根据电机运行速度和获取的大臂回转速度计算塔身形变角度,其计算公式为:
[0042][0043]
其中,为塔身形变角度,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,ω
d
为大臂回转速度,ω
m
为电机运行速度。
[0044]
s103、根据回转阻力转矩计算塔身形变给定角度,或者根据给定的大臂回转速度
与获取的大臂回转速度的差值计算塔身形变给定角度,或者根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度;
[0045]
具体的,步骤s103中,根据回转阻力转矩计算塔身形变给定角度,其计算公式为:
[0046][0047]
其中,为塔身形变给定角度,k
f
为回转阻尼系数,k
t
为塔身抗扭曲刚度,为塔身形变角度。
[0048]
步骤s103中,还可根据给定的大臂回转速度与获取的大臂回转速度的差值计算塔身形变给定角度,计算过程可通过pid运算实现,在此不做详细描述。
[0049]
步骤s103中,还可根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度,其计算公式为:
[0050][0051]
其中,为塔身形变给定角度,为塔身形变角度,t
e
为电机电磁转矩,r1为回转机构小齿轮半径,r2为回转机构大齿轮半径,k1为回转机构减速机的减速比,k
t
为塔身抗扭曲刚度。
[0052]
s104、根据塔身形变给定角度和塔身形变角度实时调整电机运行速度,返回至步骤s101。
[0053]
具体的,根据步骤s102获取的塔身形变给定角度和步骤s103获取的塔身形变角度进行比较,使塔身形变角度跟随塔身形变给定角度,从而使实际的大臂回转速度跟随给定的大臂回转速度,给定的大臂回转速度可根据用户操作指令生成。
[0054]
对比仿真试验如下:
[0055]
未采用本发明控制方法的仿真结果如图2所示,图中较平直的曲线表示给定的大臂回转速度,波浪状的曲线表示实际的大臂回转速度。由图2可知,大臂回转速度出现了较严重的超调和振荡。
[0056]
而采用本发明控制方法的仿真结果如图3所示,图3中较平直的曲线表示给定的大臂回转速度,平滑过渡的曲线表示实际的大臂回转速度。由图3可知,大臂回转速度控制平稳,未出现超调和振荡,因此,充分证明了本发明控制方法的正确性和有效性,使得大臂回转速度控制平稳,可显著提高了回转系统的运行效率和舒适性。
[0057]
如图4所示,基于同一发明构思,本实施例还公开了一种塔式起重机回转机构控制系统,该系统包括:
[0058]
大臂回转速度计算模块101,用于根据大臂回转速度估算模型或安装在大臂的速度传感器获取大臂回转速度;
[0059]
塔身形变角度计算模块102,用于根据电机运行速度和获取的大臂回转速度计算塔身形变角度;
[0060]
塔身形变给定角度计算模块103,用于根据回转阻力转矩计算塔身形变给定角度,或根据给定的大臂回转速度与获取的大臂回转速度的差值计算塔身形变给定角度,或根据由于塔身形变产生的弹性力矩和电机电磁转矩的差值计算塔身形变给定角度;
[0061]
电机速度调整模块104,用于根据塔身形变给定角度和塔身形变角度实时调整电机运行速度。
[0062]
塔式起重机回转机构在运行过程中,由电机速度调整模块104输出电机运行指令以调整电机的实时运行速度,电机运行从而带动减速机运转,减速机运转时驱动小齿轮转动,进而带动大齿轮及塔式起重机的大臂转动。
[0063]
本发明提出的一种塔式起重机回转机构控制方法及系统,通过采用上述技术方案,使得本发明的塔式起重机的大臂回转速度控制平稳,显著提高了回转系统运行效率和舒适性,无需涡流制动器辅助调速,并且不仅降低了系统成本,而且还减少了系统的故障点。
[0064]
为了让本领域技术人员进一步理解本发明的技术方案,下面详细提供了大臂回转速度估算模型的推导过程,具体如下:
[0065]
电机侧满足如下计算公式:
[0066][0067]
其中,t
m
为电机输出力矩,t
mf
为传动阻力,j
m
为电机转动惯量,ω
m
为电机运行速度,k1为回转机构减速机的减速比。
[0068]
小齿轮侧满足如下计算公式:
[0069][0070]
其中,t1为小齿轮的驱动力矩,t
t
为塔身的弹性力矩,ω1为小齿轮运行角速度,r1为小齿轮半径,r2为大齿轮半径。
[0071]
塔身满足如下计算公式:
[0072][0073]
其中,t
t
为塔身弹性转矩,k
t
为塔身抗扭曲刚度,为塔身形变角度。
[0074]
塔机大臂满足如下计算公式:
[0075][0076]
其中,t
d
为大齿轮的驱动力矩,k
f
为回转阻尼系数,j
d
为大臂惯量,为塔身形变角
度。
[0077]
综合公式(5)~(8),可得到大臂回转速度估算模型,即大臂回转角速度的计算公式:
[0078][0079]
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1