一种输电线路深基坑掏挖作业机器人的渣土输送翻斗的制作方法
1.本实用新型属于工程电子设备,具体涉及一种深基坑掏挖作业机器人的渣土输送装置,适用于深基坑。
背景技术:
2.深基坑掏挖基础是一种普遍采用的基础型式,在输电线路工程得到了广泛应用。由于受山区地线条件等因素制约,目前现状机械作业程度不高,存在作业人员劳动强度大和有限空间作业安全风险,亟待通过机械化、机器人应用等技术创新,来提升深基坑作业效率和安全问题,减轻作业人员的劳动强度。
技术实现要素:
3.本实用新型提供一种输电线路深基坑掏挖作业机器人渣土输送翻斗,电脑将通过蓝牙将翻斗吊出吊入命令传送给kbk行车,在翻斗盛土后收到准备起吊信号时检测翻斗活动吊架是否到位,在翻斗到达渣土存放区地面合适高度时自动释放渣土,检测翻斗倒土是否动作;以蓝牙方式通过蓝牙中继器和近处电脑通讯,由电脑与移动网络客户端交换数据(如集中控制平台、智慧工地系统等),来进行深基坑作业的远程监控和统一管理,提升作业安全水平,防止安全事故发生,保障作业人员生命安全。
4.本实用新型解决其技术问题所采取的技术方案是:
5.一种输电线路深基坑掏挖作业机器人的渣土输送翻斗,包括吊环、两把电磁锁、辅吊架、斗、四个固定轴承、接近雷达、主吊架、滑动槽、控制器;所述控制器内含锂电池和蓝牙微处理器,所述电磁锁内含锁和限位开关,所述接近雷达内含倾角传感器;控制器和电磁锁分别固定在主吊架上,接近雷达固定在斗底中部,控制器分别与电磁锁、接近雷达相连;辅吊架通过滑动槽卡入主吊架,主吊架和辅吊架的两侧分别通过一固定轴承焊接在斗的底部,主吊架顶部设有吊环,便于本实用新型的渣土输送翻斗吊入吊出。本实用新型的渣土输送翻斗以蓝牙方式通过蓝牙中继器和近处集中控制平台或智慧工地系统中电脑通讯,由电脑与移动网络客户端交换数据。
6.通过使用本实用新型,实现输电线路深基坑掏挖作业的数字化、信息化、智能化、科学化管控,加强事故预警预防,保障作业人员人身安全。
附图说明
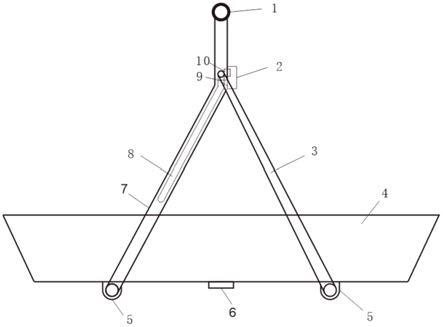
7.图1是本实用新型的结构正面示意图。
8.图2是本实用新型的结构右面示意图。
9.图3是本实用新型的安装布置图。
10.图中:1.吊环,2.电磁锁,3.辅吊架,4.斗,5.固定轴承,6.接近雷达,7.主吊架,8.滑动槽,9.锁,10.限位开关,11.控制器,12.翻斗ⅰ,13.kbk行吊ⅰ,14.kbk行吊轨道固定卡座与定位板ⅰ,15.kbk行吊轨道支撑架ⅰ,16.kbk行车电缆滑板ⅰ,17.电缆ⅰ,18.kbk行吊轨道固
定卡座与限位板ⅱ,19.电缆ⅱ,20.渣土释放区,21.翻斗ⅱ,22.kbk行吊ⅱ,23.kbk行吊轨道,24.kbk行吊ⅰ限位板ⅰ,25.kbk行吊ⅱ限位板ⅱ,26.蓝牙中继器,27.机器人,28.深基坑,29.红外定位光源。
具体实施方式
11.下面结合附图对本实用新型作进一步描述。本实用新型所用的各器件均为现有结构,直接购买得到。
12.如图1、图2所示,本实用新型的输电线路深基坑掏挖作业机器人的渣土输送翻斗,包括吊环1、两把电磁锁2、辅吊架3、斗4、四个固定轴承5、接近雷达6、主吊架7、滑动槽8、控制器11;所述控制器11内含锂电池和蓝牙微处理器,所述电磁锁2内含锁9和限位开关10,所述接近雷达6内含倾角传感器;控制器11和电磁锁2分别固定在主吊架7上,接近雷达6固定在斗4底中部,控制器11分别与电磁锁2、接近雷达6相连;辅吊架3通过滑动槽8卡入主吊架7,主吊架7和辅吊架3的两侧分别通过一固定轴承5焊接在斗4的底部,主吊架7顶部设有吊环1,便于本实用新型的渣土输送翻斗吊入吊出。
13.本实用新型使用时,可以配套两个翻斗一起使用。如图3所示。例如集中控制平台或智慧工地系统中电脑通过蓝牙将准备起吊信号传送给深基坑28内的机器人27,深基坑28上方设有蓝牙中继器26和四个红外定位光源29,机器人27抬起其中一个翻斗ⅰ12的主吊架7,翻斗ⅰ12的控制器11通过检测限位开关10与接近雷达6内的倾角传感器,检查翻斗ⅰ12的辅吊架3到位并通过蓝牙应答后,电脑通知行吊ⅰ13开始起吊,在行吊ⅰ13到达渣土释放区后,行吊ⅰ13下放翻斗ⅰ12,当接近雷达6检测到离地面合适高度时,翻斗ⅰ12的电磁锁2动作,在重力作用下,翻斗ⅰ12的辅吊架3沿滑动槽8下移,翻斗ⅰ12的控制器11通过限位开关10与接近雷达6内的倾角传感器检测到斗4已翻开后,电脑通过蓝牙将通知kbk行吊ⅰ13起吊继续作业;在翻斗ⅰ12的控制器11检测到限位开关10与接近雷达6状态异常时通过蓝牙实时传送近处电脑,实现施工现场异常告警提示。
14.在kbk行吊ⅰ13从深基坑28起吊时,kbk行吊ⅱ22停在kbk行吊轨道固定卡座与定位板ⅰ14右侧等待,当kbk行吊ⅰ13向渣土释放区20移动通过kbk行吊轨道固定卡座与定位板ⅰ14后,kbk行吊ⅱ22再根据蓝牙接收的信号确定是否向深基坑28移动,如果是,kbk行吊ⅱ22带动翻斗ⅱ21运行到深基坑28,由机器人27往翻斗ⅱ21内装渣土,等待集中控制平台或智慧工地系统中电脑通过蓝牙将准备起吊信号传送给深基坑28内的机器人27,机器人27抬起翻斗ⅱ21的主吊架7,翻斗ⅱ21的控制器11通过检测限位开关10与接近雷达6内的倾角传感器,检查翻斗ⅱ21的辅吊架3到位并通过蓝牙应答后,电脑通知行吊ⅱ22开始起吊,在行吊ⅱ22到达渣土释放区后,行吊ⅱ22下放翻斗ⅱ21,当接近雷达6检测到离地面合适高度时,翻斗ⅱ21的电磁锁2动作,在重力作用下,翻斗ⅱ21的辅吊架3沿滑动槽8下移,翻斗ⅱ21的控制器11通过限位开关10与接近雷达6内的倾角传感器检测到斗4已翻开后,电脑通过蓝牙将通知kbk行吊ⅱ22起吊继续作业;在翻斗ⅱ21的控制器11检测到限位开关10与接近雷达6状态异常时通过蓝牙实时传送近处电脑,实现施工现场异常告警提示。kbk行吊ⅰ13完成倒土后返回kbk行吊轨道固定卡座与定位板ⅰ14右侧等待。
技术特征:
1.一种输电线路深基坑掏挖作业机器人的渣土输送翻斗,包括吊环、两把电磁锁、辅吊架、斗、四个固定轴承、接近雷达、主吊架、滑动槽、控制器;其特征在于:所述控制器内含锂电池和蓝牙微处理器,所述电磁锁内含锁和限位开关,所述接近雷达内含倾角传感器;控制器和电磁锁分别固定在主吊架上,接近雷达固定在斗底中部,控制器分别与电磁锁、接近雷达相连;辅吊架通过滑动槽卡入主吊架,主吊架和辅吊架的两侧分别通过一固定轴承焊接在斗的底部,主吊架顶部设有吊环。
技术总结
本实用新型涉及一种输电线路深基坑掏挖作业机器人的渣土输送翻斗,包括吊环、两把电磁锁、辅吊架、斗、四个固定轴承、接近雷达、主吊架、滑动槽、控制器;所述控制器内含锂电池和蓝牙微处理器,所述电磁锁内含锁和限位开关,所述接近雷达内含倾角传感器;控制器和电磁锁分别固定在主吊架上,接近雷达固定在斗底中部,控制器分别与电磁锁、接近雷达相连;辅吊架通过滑动槽卡入主吊架,主吊架和辅吊架的两侧分别通过一固定轴承焊接在斗的底部,主吊架顶部设有吊环。本实用新型与输电线路深基坑掏挖作业机器人协同配合,实现输电线路深基坑掏挖作业渣土运输处理环节的智能化,降低作业人员劳动强度,减少人机协作环节,保障作业人员人身安全。安全。安全。
技术研发人员:寻凯
受保护的技术使用者:寻凯
技术研发日:2020.08.25
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1