控制悬臂斗轮堆取料机瞬时取料量的控制装置的制作方法
1.本实用新型涉及一种控制悬臂斗轮堆取料机瞬时取料量的控制装置。
背景技术:
2.悬臂式斗轮取料机作业时,斗轮驱动电机电流(电机驱动斗轮)或斗轮压力(液压马达驱动斗轮)反映斗轮所承受的负载,是斗轮所取料量的最实时的信号。而取料量可由取料流量体现,即单位时间内的取料量。人工控制下的取料,司机通过经验,控制斗轮来挖取物料。由于操作的不稳定与实时流量判断的滞后等因素,经常会出现超流量或取料不足的情况,影响取料效率,也会对皮带输送装置带了负面的影响。为了实现人工控制取料方式中取料的大致恒定,主要是边取料边观测安装在悬臂皮带上的皮带秤测得的瞬时流量,得知当前取料流量。通过与设定取料流量对比,调节悬臂回转速度快慢,以此来调整取料流量。但皮带秤的位置与斗轮之间有一定距离,皮带秤测得的读数就会有些滞后,无法实时准确的反映斗轮取料流量。所以人工控制下的取料作业流量的稳定性不高,完全依赖操作人员的经验。
技术实现要素:
3.本实用新型的目的在于提供一种能保持整个取料过程的取料量恒定的控制悬臂斗轮堆取料机瞬时取料量的控制装置。
4.本实用新型的技术解决方案是:
5.一种控制悬臂斗轮堆取料机瞬时取料量的控制装置,其特征是:包括装在竖支架上、位于煤输送带上方的煤流量计,煤流量计与plc控制器连接,plc控制器与控制斗轮堆取料机悬臂回转速度的控制器连接。
6.所述煤流量计为sick的lms111系列流量传感器。
7.本实用新型采用的lms111系列流量传感器,防护等级为ip67、采用先进的非接触光学检测方式、连续无间断进行悬皮流量检测。
8.流量传感器检测到的实时取料量精准度较高、实时性和准确性较好地保证了闭环系统的控制效果,实现瞬时取料量对设定值的跟随,实际取料量的偏差范围也在合理范围之内。本实用新型为悬臂斗轮堆取料机自动取料提供了一种切实可行的方法,为实现斗轮机无人化作业的深层次应用提供了关键要素,是适应火电厂煤场智能管控需求、紧跟时代发展步伐的创新方法。
附图说明
9.下面结合附图和实施例对本实用新型作进一步说明。
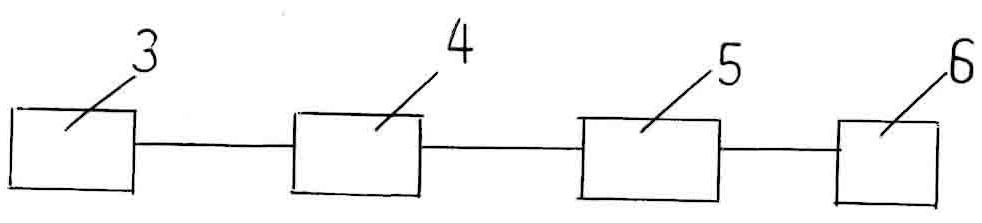
10.图1是本实用新型一个实施例的结构示意图。
11.图2是煤流量计安装结构示意图。
具体实施方式
12.一种控制悬臂斗轮堆取料机瞬时取料量的控制装置,包括装在竖支架1上、位于煤输送带2上方的煤流量计3,煤流量计与plc控制器4连接,plc控制器与控制斗轮堆取料机悬臂6回转速度的控制器5连接。
13.所述煤流量计为sick的lms111系列流量传感器。
技术特征:
1.一种控制悬臂斗轮堆取料机瞬时取料量的控制装置,其特征是:包括装在竖支架上、位于煤输送带上方的煤流量计,煤流量计与plc控制器连接,plc控制器与控制斗轮堆取料机悬臂回转速度的控制器连接。2.根据权利要求1所述的控制悬臂斗轮堆取料机瞬时取料量的控制装置,其特征是:所述煤流量计为sick的lms111系列流量传感器。
技术总结
本实用新型公开了一种控制悬臂斗轮堆取料机瞬时取料量的控制装置,包括装在竖支架上、位于煤输送带上方的煤流量计,煤流量计与PLC控制器连接,PLC控制器与控制斗轮堆取料机悬臂回转速度的控制器连接。本实用新型流量传感器检测到的实时取料量精准度较高、实时性和准确性较好地保证了闭环系统的控制效果,实现瞬时取料量对设定值的跟随,实际取料量的偏差范围也在合理范围之内。本实用新型为悬臂斗轮堆取料机自动取料提供了一种切实可行的方法,为实现斗轮机无人化作业的深层次应用提供了关键要素,是适应火电厂煤场智能管控需求、紧跟时代发展步伐的创新方法。跟时代发展步伐的创新方法。跟时代发展步伐的创新方法。
技术研发人员:祝明 刘洪彬 葛云龙 孙雯雯 李欣 孟祥伍 陈迟
受保护的技术使用者:华能国际电力股份有限公司南通电厂
技术研发日:2020.11.26
技术公布日:2021/9/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1