一种异形斜向夹取撕膜机构的制作方法
:
1.本实用新型涉及撕膜技术领域,特指一种异形斜向夹取撕膜机构。
背景技术:
2.目前市面上对于除去产品表面保护膜一般采用的是人工手动撕膜,专用于撕膜的机构较少,较多的情况是由多轴机械手抓取产品时附加撕掉保护膜,而采用多轴机械手撕膜会影响机械手本身工作的效率,且需要单独调试和增加运行程序,不仅提高了运行成本,还降低工作效率,若单独采用多轴机械手撕膜,使用成本太高,增加了生产投入。
3.有鉴于此,本发明人提出以下技术方案。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种异形斜向夹取撕膜机构。
5.为了解决上述技术问题,本实用新型采用了下述技术方案:该异形斜向夹取撕膜机构,包括:支撑板、倾斜安装于所述支撑板上的单轴机械手及安装于所述单轴机械手上并用于抓取被撕膜的夹爪气缸,所述单轴机械手包括有倾斜安装于所述支撑板上的移动轨道、以可移动的方式安装于所述移动轨道上并带动所述夹爪气缸倾斜运动的移动座及安装于所述移动轨道一端并用于驱动所述移动座沿所述移动轨道移动的驱动装置,所述夹爪气缸安装于所述移动座上。
6.进一步而言,上述技术方案中,所述移动轨道为丝杆滑台,所述驱动装置为电机,所述驱动装置并列安装于所述移动轨道的一侧,且所述驱动装置与所述移动轨道之间设置有减速装置连接传动。
7.进一步而言,上述技术方案中,所述移动轨道两端设置有用于感应所述移动座位置的第一感应器和第二感应器,所述移动座上设置有可在所述第一感应器和所述第二感应器之间穿梭的感应片。
8.进一步而言,上述技术方案中,所述支撑板包括有底板及安装于所述底板一侧的立板,该立板上端面倾斜并与所述移动轨道上端面平齐。
9.进一步而言,上述技术方案中,所述夹爪气缸通过一连接板安装于所述移动座上,该连接板向与所述移动轨道相垂直的方向延伸,所述夹爪气缸倾斜安装于所述连接板端部,且该夹爪气缸倾斜方向与所述移动轨道交叉。
10.进一步而言,上述技术方案中,所述连接板上端面倾斜成型有与夹爪气缸两侧端面平行的两个斜面。
11.进一步而言,上述技术方案中,所述夹爪气缸包括有缸体和活塞及铰接安装于所述活塞端部并配合夹紧所述被撕膜的左夹臂和右夹臂,其中,所述左夹臂根部与所述缸体左侧铰接,所述右夹臂根部与所述缸体右侧铰接。
12.采用上述技术方案后,本实用新型与现有技术相比较具有如下有益效果:本实用新型中通过将单轴机械手倾斜安装在支撑板上,并在单轴机械手上设置抓取保护膜的夹爪
气缸,由单轴机械手驱动夹爪气缸抓取保护膜后倾斜移动,利用单轴机械手的倾斜移动带动夹爪气缸同时实现x轴和z轴两个方向的运用,进而实现快速将保护膜撕下,结构简单,占用空间少,运行成本低,不仅可以节约成本,还能够提升产生效率。
附图说明:
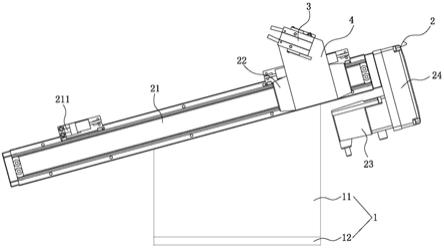
13.图1是本实用新型的主视图;
14.图2是本实用新型中夹爪气缸的立体图;
15.图3是本实用新型的立体图。
16.附图标记说明:
17.1支撑板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11底板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12立板
18.2单轴机械手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21移动轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211第一感应器
19.212第二感应器
ꢀꢀꢀꢀꢀꢀꢀꢀ
22移动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221感应片
20.23驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24减速装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3夹爪气缸
21.31缸体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32左夹臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33右夹臂
22.34活塞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4连接板
具体实施方式:
23.下面结合具体实施例和附图对本实用新型进一步说明。
24.见图1至图3所示,为一种异形斜向夹取撕膜机构,其包括:支撑板1、倾斜安装于所述支撑板1上的单轴机械手2及安装于所述单轴机械手2上并用于抓取被撕膜的夹爪气缸3,所述单轴机械手2包括有倾斜安装于所述支撑板1上的移动轨道21、以可移动的方式安装于所述移动轨道21上并带动所述夹爪气缸3倾斜运动的移动座22及安装于所述移动轨道21一端并用于驱动所述移动座22沿所述移动轨道21移动的驱动装置23,所述夹爪气缸3安装于所述移动座22上。通过将单轴机械手2倾斜安装在支撑板1上,并在单轴机械手2上设置抓取保护膜的夹爪气缸3,由单轴机械手2驱动夹爪气缸3抓取保护膜后倾斜移动,利用单轴机械手2的倾斜移动带动夹爪气缸3同时实现x轴和z轴两个方向的运用,进而实现快速将保护膜撕下,结构简单,占用空间少,运行成本低,不仅可以节约成本,还能够提升产生效率。
25.所述移动轨道21为丝杆滑台,所述驱动装置23为电机,所述驱动装置23并列安装于所述移动轨道21的一侧,且所述驱动装置23与所述移动轨道21之间设置有减速装置24连接传动。
26.所述移动轨道21两端设置有用于感应所述移动座22位置的第一感应器211和第二感应器212,所述移动座22上设置有可在所述第一感应器211和所述第二感应器212之间穿梭的感应片221。
27.所述支撑板1包括有底板11及安装于所述底板11一侧的立板12,该立板12上端面倾斜并与所述移动轨道21上端面平齐。
28.所述夹爪气缸3通过一连接板4安装于所述移动座22上,该连接板4向与所述移动轨道21相垂直的方向延伸,所述夹爪气缸3倾斜安装于所述连接板4端部,且该夹爪气缸3倾斜方向与所述移动轨道21交叉。
29.所述连接板4上端面倾斜成型有与夹爪气缸3两侧端面平行的两个斜面。
30.所述夹爪气缸3包括有缸体31和活塞34及铰接安装于所述活塞34端部并配合夹紧所述被撕膜的左夹臂32和右夹臂33,其中,所述左夹臂32根部与所述缸体31左侧铰接,所述右夹臂33根部与所述缸体31右侧铰接。
31.综上所述,本实用新型工作时,由单轴由机械手2将夹爪气缸3送到保护膜边缘处,再由夹爪气缸3将保护膜夹住,进一步,由单轴机械手2带动夹爪气缸3倾斜移动,进而将保护膜撕下,在此过程中,由于单轴机械手2的倾斜移动,会使夹爪气缸3产生x轴和z轴两个方向的移动,进而使夹爪气缸3在斯保护膜时会将保护膜一边逐渐拉远,实现快速撕开。
32.当然,以上所述仅为本实用新型的具体实施例而已,并非来限制本实用新型实施范围,凡依本实用新型申请专利范围所述构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
技术特征:
1.一种异形斜向夹取撕膜机构,其特征在于,包括:支撑板(1)、倾斜安装于所述支撑板(1)上的单轴机械手(2)及安装于所述单轴机械手(2)上并用于抓取被撕膜的夹爪气缸(3),所述单轴机械手(2)包括有倾斜安装于所述支撑板(1)上的移动轨道(21)、以可移动的方式安装于所述移动轨道(21)上并带动所述夹爪气缸(3)倾斜运动的移动座(22)及安装于所述移动轨道(21)一端并用于驱动所述移动座(22)沿所述移动轨道(21)移动的驱动装置(23),所述夹爪气缸(3)安装于所述移动座(22)上。2.根据权利要求1所述的一种异形斜向夹取撕膜机构,其特征在于:所述移动轨道(21)为丝杆滑台,所述驱动装置(23)为电机,所述驱动装置(23)并列安装于所述移动轨道(21)的一侧,且所述驱动装置(23)与所述移动轨道(21)之间设置有减速装置(24)连接传动。3.根据权利要求2所述的一种异形斜向夹取撕膜机构,其特征在于:所述移动轨道(21)两端设置有用于感应所述移动座(22)位置的第一感应器(211)和第二感应器(212),所述移动座(22)上设置有可在所述第一感应器(211)和所述第二感应器(212)之间穿梭的感应片(221)。4.根据权利要求3所述的一种异形斜向夹取撕膜机构,其特征在于:所述支撑板(1)包括有底板(11)及安装于所述底板(11)一侧的立板(12),该立板(12)上端面倾斜并与所述移动轨道(21)上端面平齐。5.根据权利要求1
‑
4任意一项所述的一种异形斜向夹取撕膜机构,其特征在于:所述夹爪气缸(3)通过一连接板(4)安装于所述移动座(22)上,该连接板(4)向与所述移动轨道(21)相垂直的方向延伸,所述夹爪气缸(3)倾斜安装于所述连接板(4)端部,且该夹爪气缸(3)倾斜方向与所述移动轨道(21)交叉。6.根据权利要求5所述的一种异形斜向夹取撕膜机构,其特征在于:所述连接板(4)上端面倾斜成型有与夹爪气缸(3)两侧端面平行的两个斜面。7.根据权利要求5所述的一种异形斜向夹取撕膜机构,其特征在于:所述夹爪气缸(3)包括有缸体(31)和活塞(34)及铰接安装于所述活塞(34)端部并配合夹紧所述被撕膜的左夹臂(32)和右夹臂(33),其中,所述左夹臂(32)根部与所述缸体(31)左侧铰接,所述右夹臂(33)根部与所述缸体(31)右侧铰接。
技术总结
本实用新型公开了一种异形斜向夹取撕膜机构,其包括:支撑板、倾斜安装于支撑板上的单轴机械手及安装于单轴机械手上并用于抓取被撕膜的夹爪气缸,单轴机械手包括有倾斜安装于支撑板上的移动轨道、安装于移动轨道上并带动夹爪气缸倾斜运动的移动座及安装于移动轨道一端并用于驱动移动座的驱动装置,夹爪气缸安装于移动座上。本实用新型中将单轴机械手倾斜安装在支撑板上,并在单轴机械手上设置抓取保护膜的夹爪气缸,由单轴机械手驱动夹爪气缸抓取保护膜后倾斜移动,利用单轴机械手的倾斜移动带动夹爪气缸同时实现X轴和Z轴两个方向的运用,进而实现快速将保护膜撕下,结构简单,占用空间少,运行成本低,不仅可以节约成本,还能够提升产生效率。够提升产生效率。够提升产生效率。
技术研发人员:陈楚朗 董忠衡
受保护的技术使用者:东莞东聚电子电讯制品有限公司
技术研发日:2020.12.11
技术公布日:2021/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1