一种抓具的抓爪移动机构的制作方法
1.本发明可用于各种物品抓取的抓具,尤其是制砖行业的砖块和砖垛的抓取抓具。
背景技术:
2.现代砖瓦生产过程中,大量应用机器人、码垛机通过机械抓具进行码垛或拆垛作业,常见的机械抓具主要由抓爪固定在滑块上,沿直线导向滑轨相对运动开合,实现对砖的抓取。
3.其中,直线导向滑轨上的滑块通常为直线滚珠结构,或是复合材料的面摩擦滑块,特点是导向精度高,稳定性好,但其结构复杂,制造成本高。尤其是在砖瓦生产高湿、高粉尘的工作场合应用时,极易因湿气、粉尘的侵入而造成锈蚀、卡滞,加剧滑块和导轨的磨损,使用寿命短,维护工作量大,使用成本居高不下。
技术实现要素:
4.为克服上述缺点,本发明提供一种结构简单、经济耐用的抓具抓爪移动机构。
5.本发明的抓具抓爪移动机构,是把抓具中的抓爪设置在一个活动体上,该活动体通过两个摆臂与抓具机架连接,两个摆臂与活动体和机架都是铰接连接,抓具机架、两个摆臂和活动体构成铰链四杆机构。
6.工作时,驱动动力推动活动体和抓爪向外侧移动,带动摆臂绕抓具机架上的铰支点摆动,抓爪张开;抓取物料时,驱动动力拉动活动体和抓爪在摆臂限制作用下向内移动夹紧物料。驱动动力推拉活动体和抓爪在摆臂限制下做开合动作,实现抓具对物料的放开和抓取动作。
7.这样的抓具结构,没有了滑轨、滑块,极大减少了开合过程中的磨损;且由于铰支点易于防尘防潮,避免粉尘侵入,抓具寿命得到延长,甚至可以实现免维护。其结构简单,制造成本相比直线滑块也得以大幅降低。
8.上述两个摆臂可以平行布置,两端铰支点中心距可以是等长的,抓具机架、两个摆臂和活动体构成平行四边形的平行四杆摆动机构,这种结构特点是可以利用平行四杆机构特性,保持抓爪在开合过程中姿态不变,适合需要抓爪保持姿态平移抓取物料的夹具。
9.两个摆臂也可以是非平行布置,两端铰支点中心距不等长的,抓具机架、两个摆臂和活动体构成非平行四边形的摇杆摆动机构。这种结构可以根据需要的抓爪轨迹姿态,预设两摆臂的长度差,使活动体和抓爪在张开和抓取动作时呈现不同的姿态。
10.驱动活动体移动的驱动动力,可以连接在活动体或抓爪上,直接推拉抓爪实现开合动作;也可以连接在摆臂上,通过驱动摆臂摆动,进而带动活动体和抓爪实现开合动作。
附图说明
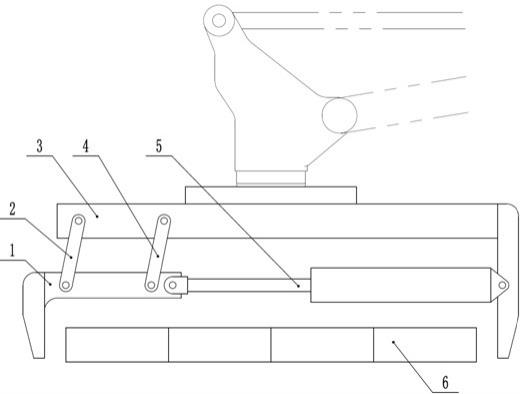
11.附图1是本发明的结构示意简图。
12.附图2是本发明的另一种结构示意简图。
13.附图3是本发明的第三种结构示意简图。
14.附图4是本发明的第四种结构示意简图。
具体实施方式
15.下面结合附图对本发明作进一步详细说明。
16.实施例1。
17.如图1所示,带有抓爪的抓爪座(1)通过两平行设置且长度相等的摆臂(2)和(4)连接在抓具机架(3)上,摆臂(2)和(4)的一端与抓具机架(3)铰接,另一端与抓爪座(1)铰接,抓具机架(3)、摆臂(2)、(4)和抓爪座(1)共同构成平行四杆摆动机构,抓爪座(1)在摆臂(2)、(4)限制下可保持姿态不变的做近似水平摆动,为抓爪座提供驱动动力的气缸(5)一端与抓爪座连接,另一端与固定在抓具机架(3)上的另一个抓爪连接。
18.驱动气缸(5)的伸缩,推拉抓爪座(1)在摆臂限制下做开合动作,通过抓爪实现抓具对物料(6)的放开和抓取动作。这种结构的物料抓具,结构简单,寿命长,甚至可以实现免维护,制造成本和使用成本得以大大降低。
19.实施例2。
20.如图2所示,本实施例的其他结构与实施例1相同,不同之处在于:两个相对设置的抓爪座(1)都是可以活动的,组成一对抓爪组,为抓爪座提供驱动动力的气缸(5)两端分别与其中一个抓爪座连接。
21.实施例3。
22.如图3所示,本实施例的其他结构与实施例1相同,不同之处在于:为抓爪提供驱动动力的气缸(5)一端与摆臂铰接,另一端铰接在抓具机架(3)上。
23.实施例4。
24.如图4所示,本实施例的其他结构与实施例1相同,不同之处在于:两摆臂(2)和(4)的长度不同,处于抓具外侧的摆臂(2)比处于抓具内侧的摆臂(4)长一些。开合动作过程中,抓爪面张开时呈现竖直姿态;抓爪向内移动抓取物料时,由于不等长两摆臂和机架、抓爪座构成的摇杆摆动机构运动特性,抓爪面呈现略微内勾姿态,可防止物料滑脱。
25.以上实例中的驱动气缸也可以是液压缸或电动推拉缸。
26.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
技术特征:
1.一种抓具的抓爪移动机构,其特征在于,抓爪设置在一个活动体上,该活动体通过两个摆臂与抓具机架连接,两个摆臂与活动体和机架都是铰接连接,机架、两个摆臂和活动体构成铰链四杆机构。2.根据权利要求1所述抓具的抓爪移动机构,其特征还在于,所述的两个摆臂是平行的。3.根据权利要求1所述抓具的抓爪移动机构,其特征还在于,所述的两个摆臂是中心距等长的。4.根据权利要求1所述抓具的抓爪移动机构,其特征还在于,所述的两个摆臂是不等长的。
技术总结
本发明提供了一种抓具的抓爪移动机构,抓爪设置在一个活动体上,该活动体通过两个摆臂与抓具机架连接,两个摆臂与活动体和机架都是铰接连接,机架、两个摆臂和活动体构成铰链四杆机构。驱动动力推拉活动体和抓爪在摆臂限制下做开合动作,实现抓具对物料的放开和抓取动作。这种结构的物料抓具,结构简单,寿命长,制造成本和使用成本得以大大降低。造成本和使用成本得以大大降低。造成本和使用成本得以大大降低。
技术研发人员:程瑞星 武中奇 李江辉 行晓峰 范红兵
受保护的技术使用者:河南欧帕工业机器人有限公司
技术研发日:2021.09.07
技术公布日:2023/3/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1