一种球型料场堆取料机悬臂回转角度校零的方法与流程
:
1.本发明涉及一种球型料场堆取料机悬臂回转角度校零的方法。
背景技术:
2.当前我国冶金、电力行业需要存储和运输大量矿石、煤等物料,在原料场中,堆取料机是将矿石、煤等重要原料堆到原料场和取出并利用皮带运送至下游车间的重要设备。通常情况下,由操作工在现场司机室进行斗轮取料的手动操作。但料场中充满料渣等粉尘原料,工作环境差,严重影响工人身体健康,同时人工取料受人为因素,取料流量不稳定,影响机械使用寿命。因此,堆取料机无人化控制系统和料场信息数字化管理是十分必要的。
3.球型料场堆取料机的分堆料悬臂和取料刮板悬臂,都绕着中心轴做回转运动。在实现无人化控制和料场数字化管理过程中,悬臂的回转角度是其定位的最重要信息参数。通常都使用回转编码器进行定位,其具有累计误差,长期使用会影响回转定位精度。传统利用霍尔开关、接触开关等传感器对回转编码器进行校零的方法,在料场积灰严重等因素下,容易出现误差和失效的情况。
技术实现要素:
4.本发明是为了解决上述现有技术存在的问题而提供一种球型料场堆取料机悬臂回转角度校零的方法。
5.本发明所采用的技术方案有:
6.一种球型料场堆取料机悬臂回转角度校零的方法,包括以下步骤:
7.s1.在悬臂的一侧安装一个二维激光扫描仪,其扫描方向与悬臂平行并靠近悬臂前端,能够扫描到球型料场墙壁上;
8.s2.在料场墙壁上安装一个规则形状的反光板当作特征标记物,安装位置凸出墙面1m,安装高度与悬臂末端高度基本保持一致,安装位置尽量安装在料场大门处两侧,避免料堆遮挡;
9.s3.在悬臂回转过程中,扫描仪以一定频率(50hz)进行实时扫描,并针对每一帧激光扫描数据记录对应时刻的编码器值;
10.s4.扫描仪每一帧数据可以通过每个激光点的距离和角度数据,计算出这一帧所扫描的物体轮廓,并将点转换到以激光源点为原点的直角坐标系中
11.x=l
·
cosθ
12.y=l
·
sinθ
13.x和y分别是扫描点在以激光扫描源点为原点的直角坐标系中的坐标值,l为被扫描点到激光源点的距离,θ为激光束角度;
14.s5.通过s4计算每一帧扫描轮廓曲线,通过识别算法,识别出标记物的轮廓;
15.s6.随着悬臂的持续回转,利用s4和s5的方法,能够连续识别到几条标记物的轮廓;
16.s7.s6中计算得到的第一条标记轮廓和最后一条标记物轮廓则为标记物的左右边界,其对应编码器值分别为a1、a2,则回转零点(反光板中心)对应的编码器的值为(a1+a2)/2;
17.s8.利用上述计算左右边界对应的编码器值求平均,即为回转零点对应的编码器值,使用该值对回转码编码进行校零。
18.本发明在堆取料机悬臂一侧安装激光扫描仪,扫描仪扫描方向与悬臂平行;在料场墙壁内测安装识别标记物体,用于激光扫描仪扫描识别;进行激光扫描仪安装参数测量,计算激光扫描仪激光源点和悬臂中心回转角度偏差;在悬臂回转的过程中,激光扫描仪实时扫描识别,将识别到标记物的回转位置作为零点对当前回转编码器值进行校零。由此产生的有益效果为:本发明采用激光扫描仪扫描识别特征标记物的方法进行回转角度校零,利用激光扫描仪多次回波技术克服了料场恶劣环境带来的影响,同时标记物所在位置的回转半径较大,提高了回转角度校零的精度。
附图说明:
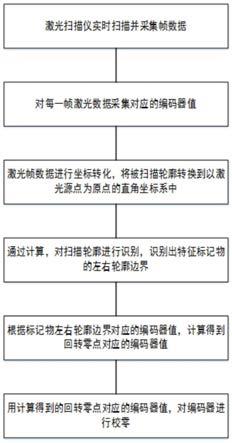
19.图1为本发明流程图。
20.图2为激光扫描仪扫描特征标记物的示意图。
具体实施方式:
21.下面结合附图对本发明作进一步的说明。
22.如图1和图2,本发明一种球型料场堆取料机悬臂回转角度校零的方法,首先在堆取料机悬臂一侧安装激光扫描仪,扫描仪扫描方向与悬臂平行;在料场墙壁内测安装识别标记物体,用于激光扫描仪扫描识别;进行激光扫描仪安装参数测量,计算激光扫描仪激光源点和悬臂中心回转角度偏差;在悬臂回转的过程中,激光扫描仪实时扫描识别,将识别到标记物的回转位置作为零点对当前回转编码器值进行校零。
23.在某球型料场进行实际使用,具体的操作方法如下:
24.s1.在堆料悬臂的左侧安装一个二维激光扫描仪,堆料悬臂回转半径为36m,激光扫描仪通过支架安装,轴向位置和悬臂前端平齐;
25.s2.球型料场半径60m,即激光扫描仪到墙壁内侧距离为24m,激光扫描仪扫描的角分辨率为0.1667
°
,则在墙面扫描点的间距约为7.5cm;
26.s3.为了确保能够扫描到标记物以及标记物外一定范围内的墙壁,形成明显的特征轮廓用于识别,标记物上、下两侧墙壁扫描范围为3m,共7.5m的扫描范围,则激光扫描仪设置扫描角度为18
°
,既能扫描到足够的轮廓进行识别,同时过滤了其他扫描数据,增加定位精度和计算效率;
27.s4.激光扫描仪扫描频率设置为50hz,随着悬臂的旋转,实时扫描设定范围内的物体,并将物体的轮廓转换到以激光源点为原点的直角坐标系中;
28.x=l
·
cosθ
29.y=l
·
sinθ
30.x和y分别是扫描点在以激光扫描源点为原点的直角坐标系中的坐标值,l为被扫描点到激光源点的距离,θ为激光束角度。
31.s5.激光扫描仪每扫描一帧数据,系统读取一次编码器的值,周期为20ms;
32.s6.对每一帧轮廓数据进行计算分析,根据墙壁轮廓和标记物轮廓的1m高度差、以及标记物所在高度轮廓长度1.5m的两个特征进行标记物识别;
33.s7.在识别到标记物所有帧里,取第一帧和最后一帧作为标记物的左右边界,其对应编码器值分别为a1、a2,则回转零点(反光板中心)对应的编码器的值为(a1+a2)/2;
34.s8.利用上述计算左右边界对应的编码器值(a1+a2)/2,即为回转零点对应的编码器值,使用该值对回转码编码进行校零。
35.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
技术特征:
1.一种球型料场堆取料机悬臂回转角度校零的方法,其特征在于:包括以下步骤:s1.在球型料场墙壁内测安装一个特征物体,用于定位标记零点;s2.在取料机的悬臂一侧安装激光扫描仪,用于扫描识别s1中标记零点的特征物体;s3.在悬臂回转过程中,激光扫描仪以设定频率进行实时扫描,并针对每一帧激光扫描数据记录编码器对应的值;s4.根据激光扫描仪实时扫描的数据,进行特征标记物的识别,并计算识别到标记物时刻所对应的编码器值;s5.将s4中计算得到的编码器值作为回转零点值,进行编码器校零。2.如权利要求1所述的球型料场堆取料机悬臂回转角度校零的方法,其特征在于:使用激光扫描仪对特征物体扫描识别以及编码器校零的过程为:使用连续的激光扫描数据识别出特征物体,进行初步定位;在初步定位出特征物体的图像中,识别出特征物体左右边界的轮廓;通过特征物体左边界对应的一组激光扫描帧数据,采集到该帧激光的时刻所对应的编码器值;通过特征物体右边界对应的一组激光扫描帧数据,采集到该帧激光的时刻所对应的编码器值;利用上述特征物体左边界与右边界对应的编码器值求平均,得到回转零点对应的编码器值,使用该值对编码器进行校零。3.如权利要求1所述的球型料场堆取料机悬臂回转角度校零的方法,其特征在于:所述特征物体为形状规则的矩形反光板,特征物体凸出球型料场墙壁1m,且平行于墙壁安装。4.如权利要求1所述的球型料场堆取料机悬臂回转角度校零的方法,其特征在于:s3中激光扫描仪以50hz的频率进行实时扫描。
技术总结
本发明公开了一种球型料场堆取料机悬臂回转角度校零的方法,在堆取料机悬臂一侧安装激光扫描仪,扫描仪扫描方向与悬臂平行;在料场墙壁内测安装识别标记物体,用于激光扫描仪扫描识别;进行激光扫描仪安装参数测量,计算激光扫描仪激光源点和悬臂中心回转角度偏差;在悬臂回转的过程中,激光扫描仪实时扫描识别,将识别到标记物的回转位置作为零点对当前回转编码器值进行校零。本发明采用激光扫描仪扫描识别特征标记物的方法进行回转角度校零,利用激光扫描仪多次回波技术克服了料场恶劣环境带来的影响,同时标记物所在位置的回转半径较大,提高了回转角度校零的精度。提高了回转角度校零的精度。提高了回转角度校零的精度。
技术研发人员:刘峰 徐佩文 施海庆 潘昕 钱玉君 邵帅
受保护的技术使用者:南京科远智慧科技集团股份有限公司
技术研发日:2021.11.10
技术公布日:2022/1/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1