一种机器人行走架的制作方法
1.本实用新型涉及轨道技术领域,具体是指一种机器人行走架。
背景技术:
2.机器人设备在工作时,利用铺设在地面上的轨道对机器人设备行走进行导向,一般在机器人设备底部设置有滚轮,滚轮在轨道上滚动行走,由于滚轮与轨道为硬接触,在遇到不平整处,机器人设备容易产生颠簸,颠簸产生的振动会对机器人设备内的电子元器件造成损伤。
技术实现要素:
3.本实用新型要解决的技术问题是针对上述现有技术的不足,而提供一种机器人行走架。
4.为解决上述技术问题,本实用新型采用的技术方案是:
5.一种机器人行走架,包括左侧支架和右侧支架,所述左侧支架和右侧支架底部间隔连接有底板条;所述左侧支架和右侧支架上镜像设置有导轨座;所述导轨座表面加工有缺口,缺口将导轨座分隔成限位部和支撑部;所述支撑部上加工有方槽,方槽内设置有支撑垫板,方槽下方对称加工有安装孔;所述安装孔内设置有导向柱,导向柱外侧套设有减振弹簧;所述支撑垫板底部加工有定位孔,减振弹簧上端位于支撑垫板的定位孔内。
6.进一步的,所述左侧支架和右侧支架之间通过连接条加强连接;所述连接条焊接在底板条上。
7.进一步的,所述底板条两侧连接有垫板块;所述垫板块上加工有螺纹孔。
8.进一步的,所述左侧支架和右侧支架两端均连接有法兰连接板,法兰连接板四周开设有法兰连接螺纹孔。
9.与现有技术相比,本实用新型的一种机器人行走架,在支撑垫板下方设置减振弹簧,使机器人设备的滚轮在行走时更加平稳,避免硬接触发生振动导致机器人设备内电气元器件损伤。
附图说明
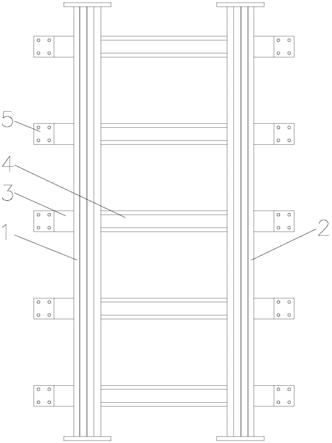
10.图1是本实用新型的结构示意图;
11.图2是本实用新型工作状态图;
12.图3是图2中的a处的放大图;
13.图4是本实用新型法兰连接板的结构示意图;
14.其中,1、左侧支架,2、右侧支架,3、底板条,4、连接条,5、垫板块,6、定位座,7、导轨座,8、支撑垫板,9、导向柱,10、减振弹簧,11、法兰连接板。
具体实施方式
15.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述。
16.如图1~4所示,一种机器人行走架,包括左侧支架1和右侧支架2,所述左侧支架1和右侧支架2底部间隔连接有底板条3;所述左侧支架1和右侧支架2之间通过连接条4加强连接;所述连接条4焊接在底板条3上;所述底板条3两侧连接有垫板块5,垫板块5上加工有螺纹孔;在左侧支架1和右侧支架2与底板条3焊接时,在垫板块5上通过螺栓连接定位用的定位座6,将左侧支架1和右侧支架2一侧紧靠定位座6,同时将连接条4放置在左侧支架1和右侧支架2之间一同进行焊接。
17.所述左侧支架1和右侧支架2上镜像设置有导轨座7;所述导轨座7表面一侧加工有缺口,缺口将导轨座7分隔成限位部和支撑部;其中限位部为方形凸座,支撑部上加工有方槽,方槽内放置有适配的支撑垫板8,方槽下方对称加工有安装孔;所述安装孔内设置有导向柱9,导向柱9底部加工有螺纹头,螺纹头与左侧支架1或右侧支架2连接;所述导向柱9外侧套设有减振弹簧10;所述支撑垫板8底部加工有定位孔,安装孔内加工有台阶面,减震弹簧10下端支撑在台阶面上,减振弹簧10上端位于支撑垫板8的定位孔内,机器人设备在移动时,支撑垫板8承压滚轮,由于在支撑垫板8下方设置了减振弹簧10,在运输重物时不易产生振动,更加平稳。
18.所述左侧支架1和右侧支架2两端均连接有法兰连接板11,法兰连接板1四周开设有法兰连接螺纹孔,法兰连接板11用于将各行走架相互连接。
19.本实用新型并不局限于所述的实施例,本领域的技术人员在不脱离本实用新型的精神即公开范围内,仍可作一些修正或改变,故本实用新型的权利保护范围以权利要求书限定的范围为准。
技术特征:
1.一种机器人行走架,其特征在于:包括左侧支架和右侧支架,所述左侧支架和右侧支架底部间隔连接有底板条;所述左侧支架和右侧支架上镜像设置有导轨座;所述导轨座表面加工有缺口,缺口将导轨座分隔成限位部和支撑部;所述支撑部上加工有方槽,方槽内设置有支撑垫板,方槽下方对称加工有安装孔;所述安装孔内设置有导向柱,导向柱外侧套设有减振弹簧;所述支撑垫板底部加工有定位孔,减振弹簧上端位于支撑垫板的定位孔内。2.根据权利要求1所述的一种机器人行走架,其特征在于:所述左侧支架和右侧支架之间通过连接条加强连接;所述连接条焊接在底板条上。3.根据权利要求1所述的一种机器人行走架,其特征在于:所述底板条两侧连接有垫板块;所述垫板块上加工有螺纹孔。4.根据权利要求1所述的一种机器人行走架,其特征在于:所述左侧支架和右侧支架两端均连接有法兰连接板,法兰连接板四周开设有法兰连接螺纹孔。
技术总结
一种机器人行走架,包括左侧支架和右侧支架,所述左侧支架和右侧支架底部间隔连接有底板条;所述左侧支架和右侧支架上镜像设置有导轨座;所述导轨座表面加工有缺口,缺口将导轨座分隔成限位部和支撑部;所述支撑部上加工有方槽,方槽内设置有支撑垫板,方槽下方对称加工有安装孔;所述安装孔内设置有导向柱,导向柱外侧套设有减振弹簧;所述支撑垫板底部加工有定位孔,减振弹簧上端位于支撑垫板的定位孔内。与现有技术相比,本实用新型的一种机器人行走架,在支撑垫板下方设置减振弹簧,使机器人设备的滚轮在行走时更加平稳,避免硬接触发生振动导致机器人设备内电气元器件损伤。生振动导致机器人设备内电气元器件损伤。生振动导致机器人设备内电气元器件损伤。
技术研发人员:王艳峰 曹晶晶
受保护的技术使用者:南通弘峰机电有限公司
技术研发日:2021.02.09
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1