一种晶棒翻转装置的制作方法
1.本实用新型属于晶棒移动设备技术领域,本实用新型涉及一种晶棒翻转装置。
背景技术:
2.传统晶棒传送过程中,机械手抓件环节都是人工将晶棒翻转后送到机械手上,劳动强度大,容易磕碰导致晶棒受损。人工成本高,磨损消耗大,工作效率低。
技术实现要素:
3.本实用新型的目的是克服上述背景技术中的不足,提供一种晶棒翻转装置,该装置结构简单,便于操作,节约成本,提高工作效率。
4.本实用新型解决其技术问题所采用的技术方案是:一种晶棒翻转装置,包括两个架体、伺服电机、轴承,两个架体的上方分别设有固定座,两个固定座上分别设有固定板,两个固定座之间通过轴承和两个固定板连接,所述两个固定板的上方设有晶棒放置板,所述晶棒放置板的下方安设有压紧气缸,晶棒放置板的端部一侧还设有拉杆气缸;其中一个架体上方设有伺服电机,伺服电机前端连接有减速机,减速机前端连接齿轮a,齿轮a与另一个齿轮b咬合连接,齿轮b设置在轴承上,与齿轮b相临的一侧固定板上设有接近开关。
5.进一步的,轴承上与齿轮b相临处还设有轴承座。
6.进一步的,所述轴承贯穿两个固定板后将两个固定座连接;
7.进一步的,所述晶棒放置板的下方两端均安设有压紧气缸;
8.进一步的,与齿轮b相临的一侧固定板上设有两个接近开关;
9.进一步的,与伺服电机相临一侧的固定板上还设有缓冲器。
10.进一步的,所述晶棒放置板的下平面的四个端点处均设有导向轮。晶棒放置板通过导向轮与两个固定板相连接。
11.进一步的,所述装置还外配有桁架机器人,用于移动晶棒以及运送晶棒。
12.所述桁架机器人、伺服电机、压紧气缸、拉杆气缸、接近开关分别与plc系统相连接。
13.本实用新型与现有技术相比具有的有益效果是:
14.本实用新型提供的晶棒翻转装置,采用伺服减速电机驱动自动翻转,可显著降低操作者劳动强度,提高工作效率。
附图说明
15.下面结合附图和实施例对本实用新型进一步说明:
16.图1是本实用新型一种晶棒翻转装置侧视图。
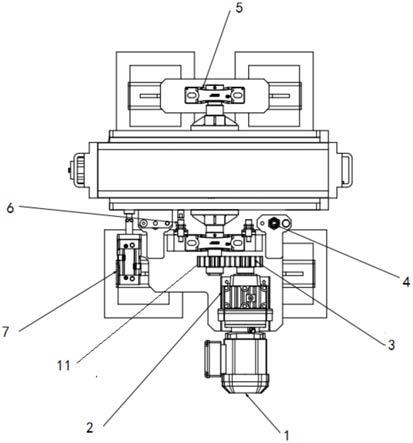
17.图2是本实用新型一种晶棒翻转装置主视图。
18.图3是本实用新型一种晶棒翻转装置俯视图。
19.图中1.伺服电机,2.减速机,3.齿轮a,4.缓冲器,5.轴承座,6.接近开关,7.拉杆气
缸,8.压紧气缸,9.晶棒,10.导向轮,11.齿轮b。
具体实施方式
20.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。
21.实施例1
22.一种晶棒翻转装置,如图1
‑
图3所示,包括两个架体、伺服电机1、轴承,两个架体的上方分别设有固定座,两个固定座上分别设有固定板,两个固定座之间通过轴承和两个固定板连接,所述两个固定板的上方设有晶棒9放置板,所述晶棒9放置板的下方安设有压紧气缸8,晶棒9放置板的端部一侧还设有拉杆气缸7;其中一个架体上方设有伺服电机1,伺服电机1前端连接有减速机2,减速机2前端连接齿轮a 3,齿轮a 3与另一个齿轮b11咬合连接,齿轮b11设置在轴承上,与齿轮b11相临的一侧固定板上设有接近开关6。
23.进一步的,轴承上与齿轮b11相临处还设有轴承座5。
24.进一步的,所述轴承贯穿两个固定板后将两个固定座连接;
25.进一步的,所述晶棒9放置板的下方两端均安设有压紧气缸8;
26.进一步的,与齿轮b11相临的一侧固定板上设有两个接近开关6;
27.进一步的,所述晶棒9放置板的下平面的四个端点处均设有导向轮10;晶棒9放置板通过导向轮10与两个固定板相连接。
28.进一步的,所述装置还外配有桁架机器人,用于移动晶棒9到晶棒9放置板以及运送晶棒9。
29.所述桁架机器人、伺服电机1、压紧气缸8、拉杆气缸7、接近开关6分别与plc系统相连接。
30.上一个工序将晶棒9传送过来装置将晶棒9抱起夹紧后翻转180
°
再反馈给桁架机器人运走。
31.上述晶棒翻转装置的具体工作进程为:
32.1)在晶棒9经上一个工序运送到晶棒9放置板后压紧气缸8夹紧位置,接近开关6有信号,通过plc系统将信号反馈给伺服电机1,伺服电机1将晶棒9翻转180
°
。
33.2)翻转180
°
后,接近开关6有信号,拉杆气缸7锁紧。
34.3)桁架机器人运行来抓取晶棒9,接近开关6感应到桁架机器人,压紧气缸8打开。
35.4)桁架机器人将晶棒9运送走。
36.5)接近开关6无感应信号,拉缸气缸7移动打开,伺服电机1回转180
°
。
37.6)接近开关6感应回转到位,拉杆气缸7移动锁紧。
38.7)以上动作循环。
39.本实用新型提供的晶棒翻转装置具体在晶棒9生产移动过程中得到应用,操作简单、快捷、轻便,实现了晶棒9运转过程中持续提供夹紧力,保障了翻转过程安全可靠,提高了作业效率。
40.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要
求保护的范围。
技术特征:
1.一种晶棒翻转装置,其特征是,包括两个架体、伺服电机(1)、轴承,两个架体的上方分别设有固定座,两个固定座上分别设有固定板,两个固定座之间通过轴承和两个固定板连接,所述两个固定板的上方设有晶棒(9)放置板,所述晶棒(9)放置板的下方安设有压紧气缸(8),晶棒(9)放置板的端部一侧还设有拉杆气缸(7);其中一个架体上方设有伺服电机(1),伺服电机(1)前端连接有减速机(2),减速机(2)前端连接齿轮a(3),齿轮a(3)与另一个齿轮b(11)咬合连接,齿轮b(11)设置在轴承上,与齿轮b(11)相临的一侧固定板上设有接近开关(6)。2.如权利要求1所述的一种晶棒翻转装置,其特征是,所述装置还外配有桁架机器人;所述桁架机器人、伺服电机(1)、压紧气缸(8)、拉杆气缸(7)、接近开关(6)分别与plc系统相连接。3.如权利要求2所述的一种晶棒翻转装置,其特征是,所述轴承贯穿两个固定板后将两个固定座连接。4.如权利要求3所述的一种晶棒翻转装置,其特征是,所述晶棒(9)放置板的下方两端均安设有压紧气缸(8)。5.如权利要求4所述的一种晶棒翻转装置,其特征是,与齿轮b(11)相临的一侧固定板上设有两个接近开关(6)。6.如权利要求5所述的一种晶棒翻转装置,其特征是,轴承上与齿轮b(11)相临处还设有轴承座(5)。7.如权利要求6所述的一种晶棒翻转装置,其特征是,所述晶棒(9)放置板的下平面的四个端点处均设有导向轮(10);晶棒(9)放置板通过导向轮(10)与两个固定板相连接。
技术总结
本实用新型属于晶棒移动设备技术领域,公开了一种晶棒翻转装置。包括两个架体、伺服电机、轴承,两个架体的上方分别设有固定座,两个固定座上分别设有固定板,两个固定座之间通过轴承和两个固定板连接,所述两个固定板的上方设有晶棒放置板,所述晶棒放置板的下方安设有压紧气缸,晶棒放置板的端部一侧还设有拉杆气缸;其中一个架体上方设有伺服电机,伺服电机前端连接有减速机,减速机前端连接齿轮A,齿轮A与另一个齿轮B咬合连接,齿轮B设置在轴承上,与齿轮B相临的一侧固定板上设有接近开关。该装置结构简单,便于操作,节约成本,提高工作效率。率。率。
技术研发人员:李全普 鞠修勇 张师春 蔡振东 孙明波 贺成 金芝成
受保护的技术使用者:大连久卉科技有限公司
技术研发日:2021.04.13
技术公布日:2021/12/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1