一种便于套袋的智能垃圾桶的制作方法
1.本实用新型涉及智能垃圾桶技术领域,尤其涉及一种便于套袋的智能垃圾桶。
背景技术:
2.随着人们生活水平提高,家居生活现代化是个必然的趋势,几乎所有的传统垃圾桶行业都推出了各自的智能垃圾桶,这必将是以后的一个发展趋势,智能垃圾桶也必将成为老百姓的消费习惯,就如当初的节能灯管、饮水机一样,已全面普及,智能垃圾桶在未来的几年中也必将普及。
3.随着智能垃圾桶的快速发展,对于智能垃圾桶的要求也随之提高,但是现有的智能垃圾桶因为在垃圾袋套上后需要手部按压才能将贴合在一起的垃圾袋底部撑开,进而导致垃圾袋的套袋动作较为繁琐。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,如:现有的智能垃圾桶因为在垃圾袋套上后需要手部按压才能将贴合在一起的垃圾袋底部撑开,进而导致垃圾袋的套袋动作较为繁琐,而提出的一种便于套袋的智能垃圾桶。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种便于套袋的智能垃圾桶,包括桶体,所述桶体的顶部通过铰链转动连接有盖板,所述盖板顶部的内表面上通过安装轴承座转动连接有转动杆,所述转动杆的底端通过转动盘固定连接有扇叶,所述转动杆的外表面上设置有从动齿块,所述转动杆的背面设置有与从动齿块啮合的主动齿板,所述盖板背面的内表面上开设有滑动槽,所述主动齿板的顶部通过滑动杆滑动连接在滑动槽的内表面上,所述主动齿板的右侧通过复位弹簧固定连接在盖板右侧的内表面上,所述盖板的左侧开设有与盖板左侧内壁连通的通过孔,所述主动齿板的左端贯穿通过孔并固定连接有操作把手,所述桶体的外表面上开设有环形槽,所述环形槽的内表面上开设有安装孔,所述安装孔背面的内表面上固定连接有定位弹簧,所述定位弹簧远离桶体内壁的一端固定连接有定位u形杆,所述定位u形杆的内表面上设置有定位球。
7.优选的,所述从动齿块的数量不少于三个,所述从动齿块呈环形阵列,所述从动齿块的外表面上设置有防滑垫。
8.优选的,所述定位u形杆和定位球的数量为三个,所述定位u形杆和定位球呈环形阵列。
9.优选的,所述定位弹簧的弹性系数在十牛顿每厘米至二十牛顿每厘米之间。
10.优选的,所述桶体的正面设置有透明观察窗,所述透明观察窗的左侧设置有刻度尺。
11.优选的,所述桶体的底部设置有支撑座,所述桶体底部支撑座的外表面为曲面。
12.与现有技术相比,本实用新型的有益效果是:
13.(1)本实用新型通过将垃圾袋开口的边缘撑开,再将垃圾袋的边缘塞入定位球和桶体之间,进而起到对垃圾袋边缘位置进行固定的作用,再将盖板关闭后利用操作把手拉动主动齿板左右移动,主动齿板的移动有效利用从动齿块牵引转动杆和扇叶进行转动,进而通过扇叶转动吹风使垃圾袋底部撑开避免粘连在一起的效果,从而达到便于套袋的效果。
14.(2)本实用新型通过透明观察窗起到有效对垃圾桶内部垃圾进行观察的作用,通过刻度尺有效对垃圾桶内部垃圾高度和容量进行观察的效果。
附图说明
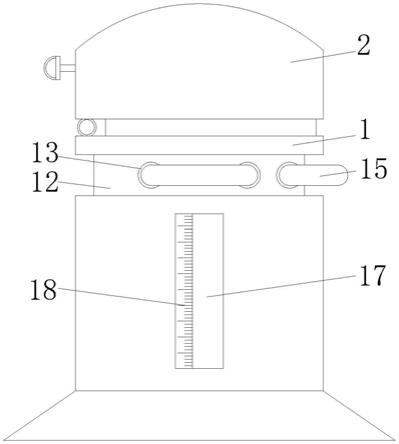
15.图1为本实用新型的正视结构示意图;
16.图2为本实用新型的盖板内部结构示意图;
17.图3为图2中的a处放大图;
18.图4为本实用新型的环形槽俯视内部结构示意图。
19.图中:1、桶体;2、盖板;3、转动杆;4、扇叶;5、从动齿块;6、主动齿板;7、滑动槽;8、滑动杆;9、复位弹簧;10、通过孔;11、操作把手;12、环形槽;13、安装孔;14、定位弹簧;15、定位u形杆;16、定位球;17、透明观察窗;18、刻度尺。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
22.参照图1
‑
4,一种便于套袋的智能垃圾桶,包括桶体1,桶体1的底部设置有支撑座,桶体1底部支撑座的外表面为曲面,桶体1的顶部通过铰链转动连接有盖板2,盖板2顶部的内表面上通过安装轴承座转动连接有转动杆3,转动杆3的底端通过转动盘固定连接有扇叶4,转动杆3的外表面上设置有从动齿块5,从动齿块5的数量不少于三个,从动齿块5呈环形阵列,从动齿块5的外表面上设置有防滑垫,转动杆3的背面设置有与从动齿块5啮合的主动齿板6,盖板2背面的内表面上开设有滑动槽7,主动齿板6的顶部通过滑动杆8滑动连接在滑动槽7的内表面上,主动齿板6的右侧通过复位弹簧9固定连接在盖板2右侧的内表面上,盖板2的左侧开设有与盖板2左侧内壁连通的通过孔10,主动齿板6的左端贯穿通过孔10并固定连接有操作把手11,桶体1的外表面上开设有环形槽12,环形槽12的内表面上开设有安装孔13,安装孔13背面的内表面上固定连接有定位弹簧14,定位弹簧14的弹性系数在十牛顿每厘米至二十牛顿每厘米之间,定位弹簧14远离桶体1内壁的一端固定连接有定位u形杆15,定位u形杆15的内表面上设置有定位球16,定位u形杆15和定位球16的数量为三个,定位u形杆15和定位球16呈环形阵列,桶体1的正面设置有透明观察窗17,透明观察窗17的左侧设置有刻度尺18,还可以将操作把手11更换为电动推杆,再将电动推杆固定连接在桶体1的
左侧,并在盖板2的下表面设置感应器,进而就能在盖板2关闭后不需要人为操作完成垃圾袋底部的撑开工作。
23.本实用新型中,使用者使用该装置时,通过将垃圾袋开口的边缘撑开,再将垃圾袋的边缘塞入定位球16和桶体1之间,进而起到对垃圾袋边缘位置进行固定的作用,再将盖板2关闭后利用操作把手11拉动主动齿板6左右移动,主动齿板6的移动有效利用从动齿块5牵引转动杆3和扇叶4进行转动,进而通过扇叶4转动吹风使垃圾袋底部撑开避免粘连在一起的效果,从而达到便于套袋的效果。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
25.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
技术特征:
1.一种便于套袋的智能垃圾桶,包括桶体(1),其特征在于,所述桶体(1)的顶部通过铰链转动连接有盖板(2),所述盖板(2)顶部的内表面上通过安装轴承座转动连接有转动杆(3),所述转动杆(3)的底端通过转动盘固定连接有扇叶(4),所述转动杆(3)的外表面上设置有从动齿块(5),所述转动杆(3)的背面设置有与从动齿块(5)啮合的主动齿板(6),所述盖板(2)背面的内表面上开设有滑动槽(7),所述主动齿板(6)的顶部通过滑动杆(8)滑动连接在滑动槽(7)的内表面上,所述主动齿板(6)的右侧通过复位弹簧(9)固定连接在盖板(2)右侧的内表面上,所述盖板(2)的左侧开设有与盖板(2)左侧内壁连通的通过孔(10),所述主动齿板(6)的左端贯穿通过孔(10)并固定连接有操作把手(11),所述桶体(1)的外表面上开设有环形槽(12),所述环形槽(12)的内表面上开设有安装孔(13),所述安装孔(13)背面的内表面上固定连接有定位弹簧(14),所述定位弹簧(14)远离桶体(1)内壁的一端固定连接有定位u形杆(15),所述定位u形杆(15)的内表面上设置有定位球(16)。2.根据权利要求1所述的一种便于套袋的智能垃圾桶,其特征在于,所述从动齿块(5)的数量不少于三个,所述从动齿块(5)呈环形阵列,所述从动齿块(5)的外表面上设置有防滑垫。3.根据权利要求1所述的一种便于套袋的智能垃圾桶,其特征在于,所述定位u形杆(15)和定位球(16)的数量为三个,所述定位u形杆(15)和定位球(16)呈环形阵列。4.根据权利要求1所述的一种便于套袋的智能垃圾桶,其特征在于,所述定位弹簧(14)的弹性系数在十牛顿每厘米至二十牛顿每厘米之间。5.根据权利要求1所述的一种便于套袋的智能垃圾桶,其特征在于,所述桶体(1)的正面设置有透明观察窗(17),所述透明观察窗(17)的左侧设置有刻度尺(18)。6.根据权利要求1所述的一种便于套袋的智能垃圾桶,其特征在于,所述桶体(1)的底部设置有支撑座,所述桶体(1)底部支撑座的外表面为曲面。
技术总结
本实用新型涉及智能垃圾桶技术领域,且公开了一种便于套袋的智能垃圾桶,包括桶体,所述桶体的顶部通过铰链转动连接有盖板,所述盖板顶部的内表面上通过安装轴承座转动连接有转动杆,所述转动杆的底端通过转动盘固定连接有扇叶,所述转动杆的外表面上设置有从动齿块。本实用新型通过将垃圾袋开口的边缘撑开,再将垃圾袋的边缘塞入定位球和桶体之间,进而起到对垃圾袋边缘位置进行固定的作用,再将盖板关闭后利用操作把手拉动主动齿板左右移动,主动齿板的移动有效利用从动齿块牵引转动杆和扇叶进行转动,进而通过扇叶转动吹风使垃圾袋底部撑开避免粘连在一起的效果,从而达到便于套袋的效果。于套袋的效果。于套袋的效果。
技术研发人员:李学军
受保护的技术使用者:深圳市欣方圳科技有限公司
技术研发日:2021.05.06
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1