一种自动化配件搬运送料装置的制作方法
1.本实用新型属于非标机械设备技术领域,涉及到一种自动化配件搬运送料装置。
背景技术:
2.自动化配件是指标准或者非标准自动化设备中常用的备品,因其使用量较大,所以采用自动化产线生产,以提高产能。生产线的生产节拍由控制器自动控制,某些工站需要步进上料时,则需要在此工站的前侧安装步进上料装置。现有的步进上料装置只能实现一个方向的移动,并不适用于需要工件两轴移动的产线送料需求。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种既可以实现工件步进送料,又可以实现工件平移的搬运送料装置。
4.为解决上述技术问题,本实用新型采用的技术方案如下:
5.一种自动化配件搬运送料装置,包括底座、x轴向平移机构、y轴向平移机构和升降机构,所述底座的两侧设置有载台;所述x轴向平移机构安装于所述底座的顶部,所述y轴向平移机构安装于所述x轴向平移机构的顶部滑台上,所述升降机构安装于所述y轴平移机构的顶部滑台上,所述升降机构中设置有两排等距且沿x轴向排列的气动夹爪,两排中相对的两只气动夹爪为一组。
6.与现有技术相比,本实用新型的有益效果是:
7.x轴向平移机构带着气动夹爪沿x轴移动一次,气动夹爪带着工件向前输送一个距离,y轴向平移机构带着气动夹爪沿y轴移动一次,气动夹爪带着工件侧向移动一个距离,升降机构带着气动夹爪下降,气动夹爪将工件放置于载台上之后松开工件,x轴向平移机构先带着气动夹爪后退一个距离使工件从气动夹爪中退出,之后x轴向平移机构、y轴向平移机构和升降机构带着气动夹爪复位。
8.由此可见,本装置既可以实现工件步进送料,又可以实现工件平移。
附图说明
9.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
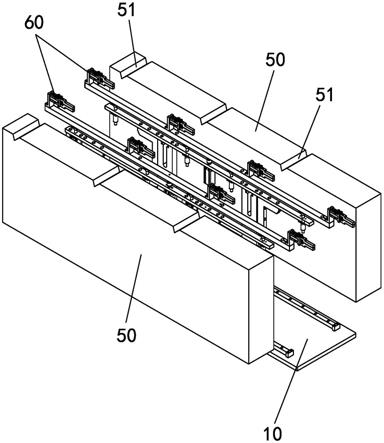
10.图1为搬运送料装置的结构图;
11.图2为搬运送料装置(去掉载台)的结构图。
具体实施方式
12.下面将结合附图对本实用新型实施例中的技术方案进行清楚、完整地描述。
13.实施例
14.图1和2中所示的搬运送料装置,包括底座10、x轴向平移机构20、y轴向平移机构30
和升降机构40,底座的两侧设置有载台50,载台的顶部设置有数个承载槽51。x轴向平移机构安装于底座的顶部,y轴向平移机构安装于x轴向平移机构的顶部滑台上,升降机构安装于y轴平移机构的顶部滑台上,升降机构中设置有两排等距且沿x轴向排列的气动夹爪,两排中相对的两只气动夹爪为一组。优选地,x轴向平移机构包括x轴向导轨21、滑台一22和伺服丝杆组件一23,滑台一安装于x轴向导轨上,伺服丝杆组件一驱动滑台一沿x轴向导轨移动。优选地,y轴向平移机构包括y轴向导轨31、滑台二32和伺服丝杆组件33,滑台二安装于y轴向导轨上,伺服丝杆组件二驱动滑台二沿y轴向导轨移动。优选地,升降机构包括两块支撑板41,支撑板的顶部设置有浮动板42,浮动板与支撑板之间通过导杆43连接,支撑板上安装有驱动浮动板升降的气缸44;每块支撑板的顶部安装有一排气动夹爪60。
15.上述送料装置的工作流程为:
16.第一步,外部机械装置将一个工件放置于载台的上料位,升降机构将气动夹爪调节至与工件等高;
17.第二步,x轴向平移机构带着气动夹爪沿x轴向前移动一个距离将工件夹持;然后升降机构驱动气动夹爪上升,使工件离开载台;
18.第三步,x轴向平移机构带着气动夹爪继续移动一个距离,气动夹爪带着工件向前输送一个距离;
19.第四步,y轴向平移机构带着气动夹爪沿y轴移动一次,气动夹爪带着工件侧向移动一个距离;
20.第五步升降机构带着气动夹爪下降,气动夹爪将工件放置于载台上之后松开工件;
21.第六步,x轴向平移机构先带着气动夹爪后退一个距离使工件从气动夹爪中退出,之后x轴向平移机构、y轴向平移机构和升降机构带着气动夹爪复位。
22.由此可见,本装置既可以实现工件步进送料,又可以实现工件平移。
23.对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
技术特征:
1.一种自动化配件搬运送料装置,其特征在于,包括底座、x轴向平移机构、y轴向平移机构和升降机构,所述底座的两侧设置有载台;所述x轴向平移机构安装于所述底座的顶部,所述y轴向平移机构安装于所述x轴向平移机构的顶部滑台上,所述升降机构安装于所述y轴平移机构的顶部滑台上,所述升降机构中设置有两排等距且沿x轴向排列的气动夹爪,两排中相对的两只气动夹爪为一组。2.根据权利要求1所述的一种自动化配件搬运送料装置,其特征在于,所述x轴向平移机构包括x轴向导轨、滑台一和伺服丝杆组件一,所述滑台一安装于所述x轴向导轨上,所述伺服丝杆组件一驱动所述滑台一沿所述x轴向导轨移动。3.根据权利要求1所述的一种自动化配件搬运送料装置,其特征在于,所述y轴向平移机构包括y轴向导轨、滑台二和伺服丝杆组件,所述滑台二安装于所述y轴向导轨上,所述伺服丝杆组件二驱动所述滑台二沿所述y轴向导轨移动。4.根据权利要求1所述的一种自动化配件搬运送料装置,其特征在于,所述升降机构包括两块支撑板,所述支撑板的顶部设置有浮动板,所述浮动板与所述支撑板之间通过导杆连接,所述支撑板上安装有驱动所述浮动板升降的气缸;每块所述支撑板的顶部安装有一排所述气动夹爪。5.根据权利要求1所述的一种自动化配件搬运送料装置,其特征在于,所述载台的顶部设置有数个承载槽。
技术总结
本实用新型提供了一种自动化配件搬运送料装置,包括底座、X轴向平移机构、Y轴向平移机构和升降机构,底座的两侧设置有载台;X轴向平移机构安装于底座的顶部,Y轴向平移机构安装于X轴向平移机构的顶部滑台上,升降机构安装于Y轴平移机构的顶部滑台上,升降机构中设置有两排等距且沿X轴向排列的气动夹爪,两排中相对的两只气动夹爪为一组。X轴向平移机构、Y轴向平移机构带着气气动夹爪和升降机构配合运行既可以实现工件步进送料,又可以实现工件平移。平移。平移。
技术研发人员:卢万清 覃鸿 郑海斌 谢恩庆 蔡显举
受保护的技术使用者:苏州海之鸿智能装备有限公司
技术研发日:2021.05.27
技术公布日:2021/12/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1