塑料袋捆扎机输送机构的制作方法
1.本实用新型涉及塑料袋加工装置技术领域,特别是一种塑料袋捆扎机输送机构。
背景技术:
2.人们日常生活中普遍使用的塑料袋都是由制袋机加工而成的,制袋机每产 出一定数量的塑料袋后自动摞成一摞,再由折叠捆扎机将每摞塑料袋进行多次折叠,折叠成长条状后,再由皮筋扩张装置捆扎起来,以便于存放、运输、销售和使用。塑料包装袋在折叠完成后,需要通过输送机构运输到捆扎机构处进行捆扎,而现有的输送机构需要的零部件较多,结构较为复杂。
技术实现要素:
3.本实用新型的目的在于针对以上现有技术的不足,提供一种塑料袋捆扎机输送机构,达到通过简单结构和动作步骤,完成输送塑料袋的目的。
4.本实用新型所提供的一种塑料袋捆扎机输送机构,其特征在于:包括装夹机构和夹取机构,所述的装夹机构和夹取机构分别安装在机架上;所述的装夹机构包括两装夹板和驱动机构,两装夹板的两端分别与机架转动配合,装夹板通过驱动机构驱动,所述的装夹板上设有多个槽口;
5.所述的夹取机构与机架通过滑动机构滑动配合,夹取机构与机架之间通过传动机构驱动;所述的夹取机构与传动机构之间通过伸缩机构连接,所述的夹取机构包括夹取板、翻转机构、滑动架和升降架,滑动架与机架通过滑动机构滑动配合,升降架与滑动架通过滑动机构滑动配合,升降架与滑动架支架通过伸缩机构连接,所述的夹取板的两端分别与夹板垂直连接,夹板与夹取板的槽口相对应;所述的升降架分别通过翻转机构和伸缩机构与一夹取板连接。
6.上述的装夹板的一端分别与齿轮相配合,两齿轮相外啮合,其中一装夹板的一端与旋转气缸连接。
7.上述的传动机构包括主动带轮、从动带轮和同步带,主动带轮和从动带轮与机架转动配合,主动带轮和从动带轮通过同步带连接,同步带与夹取机构连接,主动带轮与电动机的电机轴连接。
8.上述的翻转机构为翻转气缸。
9.上述的滑动机构包括滑轨和滑块,滑块上设有与滑轨的相对应的滑槽,滑轨放置在滑块的滑槽中,使滑块能够沿滑轨滑动。
10.上述的伸缩机构为气动伸缩缸、液压伸缩缸或电动伸缩杆。
11.与现有技术相比较,本实用新型具有以下突出的有益效果:
12.本实用新型依次通过装夹机构和夹取机构,将折叠好的塑料袋由折叠机构向捆扎机构的转移,由于装夹机构和夹取机构的结构设计较为简单,因此,在运行过程中,其动作步骤较少,不仅降低了制造成本,而且降低了使用故障率。
附图说明
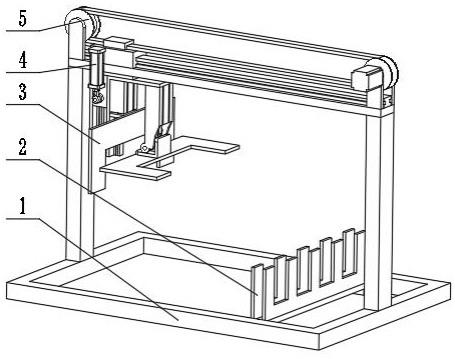
13.图1是本实用新型的结构示意图。
14.图2是本实用新型的主视图。
15.图3是本实用新型的俯视图。
16.图4是本实用新型的左侧视图。
17.图5是本实用新型的工作状态示意图。
具体实施方式
18.下面结合说明书附图和具体实施方式对本实用新型进一步说明。
19.如图1~4所示,本实用新型包括装夹机构2和夹取机构3。
20.所述的装夹机构2和夹取机构3分别安装在机架1上,装夹机构2位于夹取机构3运动行程的终端。
21.所述的装夹机构2包括两装夹板202和驱动机构,两装夹板202的两端分别与机架1转动配合,装夹板202通过驱动机构驱动,两装夹板202能够通过驱动机构对称运动。本实施例中,所述的装夹板202的一端分别与齿轮203相配合,两齿轮203相外啮合,其中一装夹板202的一端与旋转气缸201连接。
22.所述的装夹板202上设有多个均匀排列的槽口。
23.所述的夹取机构3与机架1通过滑动机构滑动配合,夹取机构3与机架1之间通过传动机构5驱动,传动机构5能够使夹取机构3能够沿机架1的长度方向运动。本实施例中,所述的传动机构5包括主动带轮502、从动带轮501和同步带503,主动带轮502和从动带轮501与机架1转动配合,主动带轮502和从动带轮501通过同步带503连接,同步带503与夹取机构3连接,主动带轮502与电动机504的电机轴连接。
24.所述的夹取机构3与传动机构5之间通过伸缩机构4连接,使伸缩机构4能够带动夹取机构3上下运动。
25.所述的夹取机构3包括夹取板303、翻转机构304、滑动架301和升降架302,滑动架301与机架1通过滑动机构滑动配合,升降架302与滑动架301通过滑动机构滑动配合,升降架302能够沿滑动架301上下运动,升降架302与滑动架301支架通过伸缩机构4连接。
26.本实施例中,所述的翻转机构304为翻转气缸。
27.所述的夹取板303的两端分别与夹板305垂直连接,夹板305与夹取板303的槽口相对应。
28.本实施例中,所述的滑动机构包括滑轨和滑块,滑块上设有与滑轨的相对应的滑槽,滑轨放置在滑块的滑槽中,使滑块能够沿滑轨滑动。
29.如图5所示,所述的升降架302分别通过翻转机构304和伸缩机构4与一夹取板303连接,在初始状态下,两夹取板303垂直分布,与伸缩机构4连接的夹取板303高于与翻转机构304连接的夹取板303。当启动翻转机构304后,与翻转机构304连接的夹取板303能够旋转90
°
,从而使两夹取板303平行。
30.本实施例中,所述的伸缩机构4可以为气动伸缩缸、液压伸缩缸或电动伸缩杆等能够进行直线运动的机构。
31.操作流程如下:在本实用新型的运行过程中,首先使用装夹机构2的两装夹板202
夹住折叠好的塑料袋,启动传动装置,使传动装置带动夹取机构3运行到装夹机构2的上方,启动夹取机构3的伸缩机构4,使其带动与之连接的夹取板303向下运动一段距离,继而启动夹取机构3与传动机构5连接的伸缩机构4,使整个夹取机构3向下运动,使夹取板303两端的夹板305运动到装夹板202的槽口处,启动翻转机构304,使其带动与之连接的夹取板303旋转90
°
,使两夹取板303相互平行夹取塑料袋。
32.当夹取机构3夹住塑料袋后,启动旋转气缸201,使两装夹板202反向转动90
°
,松开塑料袋,此时,启动夹取机构3与传动机构5连接的伸缩机构4,使整个夹取机构3带动塑料袋向上运动,继而启动传动机构5,使夹取机构3运行到初始位置,启动夹取机构3的伸缩机构4,使其带动与之连接的夹取板303向上运动,使两夹取板303相互错开,塑料袋掉落到捆扎机构位置,启动翻转机构304,使与之连接的夹取板303旋转90
°
复位。
33.需要说明的是,本实用新型的特定实施方案已经对本实用新型进行了详细描述,对于本领域的技术人员来说,在不背离本实用新型的精神和范围的情况下对它进行的各种显而易见的改变都在本实用新型的保护范围之内。
技术特征:
1.一种塑料袋捆扎机输送机构,其特征在于:包括装夹机构(2)和夹取机构(3),所述的装夹机构(2)和夹取机构(3)分别安装在机架(1)上;所述的装夹机构(2)包括两装夹板(202)和驱动机构,两装夹板(202)的两端分别与机架(1)转动配合,装夹板(202)通过驱动机构驱动,所述的装夹板(202)上设有多个槽口;所述的夹取机构(3)与机架(1)通过滑动机构滑动配合,夹取机构(3)与机架(1)之间通过传动机构(5)驱动;所述的夹取机构(3)与传动机构(5)之间通过伸缩机构(4)连接,所述的夹取机构(3)包括夹取板(303)、翻转机构(304)、滑动架(301)和升降架(302),滑动架(301)与机架(1)通过滑动机构滑动配合,升降架(302)与滑动架(301)通过滑动机构滑动配合,升降架(302)与滑动架(301)支架通过伸缩机构(4)连接,所述的夹取板(303)的两端分别与夹板(305)垂直连接,夹板(305)与夹取板(303)的槽口相对应;所述的升降架(302)分别通过翻转机构(304)和伸缩机构(4)与一夹取板(303)连接。2.根据权利要求1所述的塑料袋捆扎机输送机构,其特征在于:所述的装夹板(202)的一端分别与齿轮(203)相配合,两齿轮(203)相外啮合,其中一装夹板(202)的一端与旋转气缸(201)连接。3.根据权利要求1所述的塑料袋捆扎机输送机构,其特征在于:所述的传动机构(5)包括主动带轮(502)、从动带轮(501)和同步带(503),主动带轮(502)和从动带轮(501)与机架(1)转动配合,主动带轮(502)和从动带轮(501)通过同步带(503)连接,同步带(503)与夹取机构(3)连接,主动带轮(502)与电动机(504)的电机轴连接。4.根据权利要求1所述的塑料袋捆扎机输送机构,其特征在于:所述的翻转机构(304)为翻转气缸。5.根据权利要求1所述的塑料袋捆扎机输送机构,其特征在于:所述的滑动机构包括滑轨和滑块,滑块上设有与滑轨的相对应的滑槽,滑轨放置在滑块的滑槽中,使滑块能够沿滑轨滑动。6.根据权利要求1所述的塑料袋捆扎机输送机构,其特征在于:所述的伸缩机构(4)为气动伸缩缸、液压伸缩缸或电动伸缩杆。
技术总结
本实用新型公开了一种塑料袋捆扎机输送机构,属于塑料袋加工装置技术领域,其特征在于:包括装夹机构和夹取机构,所述的装夹机构和夹取机构分别安装在机架上;所述的装夹机构包括两装夹板和驱动机构,两装夹板的两端分别与机架转动配合,装夹板通过驱动机构驱动;所述的夹取机构与机架通过滑动机构滑动配合,夹取机构与机架之间通过传动机构驱动;所述的夹取机构与传动机构之间通过伸缩机构连接。与现有技术相比较具有动作步骤较少、降低了制造成本的特点。本的特点。本的特点。
技术研发人员:姚俊国 许君君 刘相贞
受保护的技术使用者:姚俊国
技术研发日:2021.06.23
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1