机器人印花收料工作站的制作方法
1.本实用新型涉及印花技术领域,尤其涉及机器人印花收料工作站。
背景技术:
2.椭圆印花机适用于服装裁片印花、成衣、裤子、袜子、雨伞等裁片的平面丝网印花,由于裁片所印刷的印花各不相同且不能一次完成,为此,需要在主机框架上设置多个印花板和多个印刷机,印刷前,通过操控系统调整每个印刷机印刷的图案,将待印刷的裁片放置于主机框架左端的印花板上,主机框架内部的传送装置控制印花板进行旋转,逐个经过每个印刷机底部进行印花,待印花的裁片旋转一周回到初始位置完成印花操作;
3.通过椭圆印花机印花完成的裁片,为了保证印花与裁片的牢固性,需要移动至印花烘干隧道炉中进行烘干操作,传统的椭圆印花机印花完成之后均通过人工手动进行收料将裁片移动至印花烘干隧道炉中,实际操作中发现不仅加大人力输出而且收料效率极低,为此,相关领域的技术人员研究出一种收料装置,有效解决上述问题;
4.现有裁片的收料装置,通过抓取机构自动抓取印刷好的衣物或其他印刷物料,再通过竖直导轨提起物料,通过横向移动导轨移动到目标位置,虽然有效实现了裁片的收料,但是,该收料装置仅仅能够带动裁片进行横向运动,无法实现旋转动作,由于印花烘干隧道炉位于椭圆印花机的后侧,使得收料装置带动裁片横向移动之后仍然需要人工进行裁片的移动,使得该收料装置的移动范围变小,使其适用性有限,导致实用性降低;并且,椭圆印花机所印花的裁片尺寸不一致,且收料装置中抓取机构为固定的,无法根据裁片的尺寸对抓取部位进行调整,导致抓取机构会误碰到印花,由于印花未完全干燥的缘故,使得印花发生损坏,需对裁片进行重新印花,实用性较差。
技术实现要素:
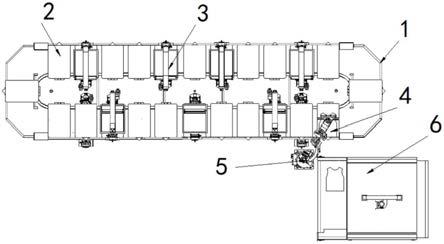
5.根据以上技术问题,本实用新型提供机器人印花收料工作站,其特征在于包括主机框架、印花板、印刷机、裁片、机器人、印花烘干隧道炉,所述主机框架为椭圆结构,所述主机框架的上端设置有印刷机,所述印刷机的数量为七个,所述主机框架的顶部设置有印花板,所述印花板的数量为n,n≥10,所述主机框架的后侧设置有印花烘干隧道炉,所述印花烘干隧道炉与主机框架之间设置有机器人;
6.所述机器人由底座、旋转臂、驱动组件a、固定件、驱动组件b、第一机械臂、第二机械臂、驱动组件c、夹具组成,所述底座的顶部设置有旋转臂,所述旋转臂的顶部设置有驱动组件a,所述驱动组件a控制旋转臂的旋转,所述旋转臂的顶部和固定件的一端连接,所述固定件的另一端和第一机械臂的一端连接,所述第一机械臂的另一端和第二机械臂的一端连接,所述第二机械臂的另一端和夹具连接,所述固定件的侧壁安装有驱动组件b,所述驱动组件b控制第一机械臂的旋转,所述第一机械臂的上端安装有驱动组件c,所述驱动组件c控制第二机械臂旋转;
7.所述夹具主要由定位板和夹板组成,定位板上侧设置由夹板,夹板由气缸控制;
8.所述机器人中的驱动组件a、驱动组件b、驱动组件c、气缸分别与人机交互系统连接,人机交互系统通过触摸屏的点击式交互,对机器人抓取位置进行控制。
9.本实用新型的有益效果为:本实用新型设计新颖,结构简单,在主机框架与印花烘干隧道炉之间设置机器人,通过交互系统控制机器人,实现360
°
旋转动作,扩大了作业范围,完全取代了现有横向移动的收料装置,本申请完全实现了自动化,无需人工参与收料,提高了适用性能,提高了实用性;
10.本实用新型中的机器人通过人机交互系统进行控制,人机交互系统通过触摸屏的点击式交互,使得工作人员根据印花裁片的尺寸,通过对人机交互系统的触摸屏进行控制,来改变夹具对裁片的抓取位置,达到了可编程的对裁片进行收料的功能;使得夹具为活动式,活动式的夹具能够躲避印花,防止夹具误碰到印花税其损坏,提高了实用性。
附图说明
11.图1为本实用新型整体结构示意图;
12.图2为本实用新型机器人的示意图;
13.图3为本实用新型人机交互系统的界面示意图。
14.如图,1-主机框架、2-印花板、3-印刷机、4-裁片、5-机器人、5-1底座、5-2旋转臂、5-3驱动组件a、5-4固定件、5-5驱动组件b、5-6第一机械臂、5-7第二机械臂、5-8驱动组件c、5-9夹具、6-印花烘干隧道炉。
具体实施方式
15.实施例1
16.本实用新型提供机器人5印花收料工作站,其特征在于包括主机框架1、印花板2、印刷机3、裁片4、机器人5、印花烘干隧道炉6,主机框架1为椭圆结构,主机框架1的上端设置有印刷机3,印刷机3的数量为七个,主机框架1的顶部设置有印花板2,印花板2的数量为n,n≥10,主机框架1的后侧设置有印花烘干隧道炉6,印花烘干隧道炉6与主机框架1之间设置有机器人5;
17.机器人5由底座5-1、旋转臂5-2、驱动组件a5-3、固定件5-4、驱动组件b5-5、第一机械臂5-6、第二机械臂5-7、驱动组件c5-8、夹具5-9组成,底座5-1的顶部设置有旋转臂5-2,旋转臂5-2的顶部设置有驱动组件a5-3,驱动组件a5-3控制旋转臂5-2的旋转,旋转臂5-2的顶部和固定件5-4的一端连接,固定件5-4的另一端和第一机械臂5-6的一端连接,第一机械臂5-6的另一端和第二机械臂5-7的一端连接,第二机械臂5-7的另一端和夹具5-9连接,固定件5-4的侧壁安装有驱动组件b5-5,驱动组件b5-5控制第一机械臂5-6的旋转,第一机械臂5-6的上端安装有驱动组件c5-8,驱动组件c5-8控制第二机械臂5-7旋转;
18.夹具5-9主要由定位板和夹板组成,定位板上侧设置由夹板,夹板由气缸控制;
19.机器人5中的驱动组件a5-3、驱动组件b5-5、驱动组件c5-8、气缸分别与人机交互系统连接,人机交互系统通过触摸屏的点击式交互,对机器人5抓取位置进行控制。
20.实施例2
21.首先,主机框架1上的印花板2由传送装置(图中未标识)控制其沿着椭圆结构的主机框架1进行移动;将待印花的裁片4平铺至主机框架1左端的印花板2上,传送装置控制裁
片4进行移动,当裁片4移动至印刷机3下侧进行印花,直至裁片4再次移动至初始位置时,完成单个裁片4的印花,工作人员操控人机操控系统的触摸屏,将机器人5启动,工作人员观察待收料裁片4的尺寸以及抓取位置,控制夹具5-9对裁片4的抓取位置,夹具5-9将其抓起,人机交互系统控制机器人5进行旋转至目标位置即印花烘干隧道炉6,放料将裁片4平铺至印花烘干隧道炉6进行烘干处理,反复上述步骤对批量裁片4进行处理即可。
22.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本实用新型提到的各个部件为现有领域常见技术,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.机器人印花收料工作站,其特征在于包括主机框架、印花板、印刷机、裁片、机器人、印花烘干隧道炉,所述主机框架为椭圆结构,所述主机框架的上端设置有印刷机,所述主机框架的顶部设置有印花板,所述主机框架的后侧设置有印花烘干隧道炉,所述印花烘干隧道炉与主机框架之间设置有机器人;所述机器人由底座、旋转臂、驱动组件a、固定件、驱动组件b、第一机械臂、第二机械臂、驱动组件c、夹具组成,所述底座的顶部设置有旋转臂,所述旋转臂的顶部设置有驱动组件a,所述驱动组件a控制旋转臂的旋转,所述旋转臂的顶部和固定件的一端连接,所述固定件的另一端和第一机械臂的一端连接,所述第一机械臂的另一端和第二机械臂的一端连接,所述第二机械臂的另一端和夹具连接,所述固定件的侧壁安装有驱动组件b,所述驱动组件b控制第一机械臂的旋转,所述第一机械臂的上端安装有驱动组件c,所述驱动组件c控制第二机械臂旋转;所述夹具主要由定位板和夹板组成,定位板上侧设置由夹板,夹板由气缸控制;所述机器人中的驱动组件a、驱动组件b、驱动组件c、气缸分别与人机交互系统连接。2.按照权利要求1所述的机器人印花收料工作站,其特征在于所述印刷机的数量为七个。3.按照权利要求1所述的机器人印花收料工作站,其特征在于所述印花板的数量为n,n≥10。
技术总结
本实用新型提供机器人印花收料工作站,其特征在于包括主机框架、印花板、印刷机、裁片、机器人、印花烘干隧道炉,所述主机框架为椭圆结构,所述主机框架的上端设置有印刷机,所述主机框架的顶部设置有印花板,所述主机框架的后侧设置有印花烘干隧道炉,所述印花烘干隧道炉与主机框架之间设置有机器人;本实用新型设计新颖,结构简单,在主机框架与印花烘干隧道炉之间设置机器人,通过交互系统控制机器人,实现360
技术研发人员:徐绍宸 李富海 周亚婷 徐浩伟 陈嘉栋 赵世明
受保护的技术使用者:吸力奇迹(天津)科技有限公司
技术研发日:2021.07.23
技术公布日:2022/3/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1