椭圆印花机上料工作站的制作方法
1.本实用新型涉及椭圆印花机技术领域,尤其涉及椭圆印花机上料工作站。
背景技术:
2.在服装加工的过程中,需要应用到椭圆印花机来对服装进行装饰,椭圆印花机主体由一个椭圆形的传送装置构成,传送装置上安装有载物板,载物板的个数通常为多个,最后在传送装置的顶部安装印刷头,进行印刷,椭圆印花机功能为,将设计好的图案进行编辑,再通过丝网印刷或数码印花的方式印制在裁有待印花布料的载物板,椭圆印花机具有多个工位,可以实现复杂图案的高效率流水线化印刷;
3.现有技术在椭圆印花机的使用过程中,其第一道工序,将待印花服装放置在椭圆印花机的载物板上,通常由操作人员手动将堆叠的服装布料手动取出后,在均匀的铺平在载物板上,在布料放置在载物板的过程中,为了避免印花出现不平整、倾斜的情况,需要操作人员反复确认载物板上的布料是否摆放平整,之后才能启动传送装置进行下一块载物板的装填,这样无疑需要消耗大量的时间,大大拖慢了工作速度,也难以保证印花的质量,自动化程度较低,实用性较差。
技术实现要素:
4.根据以上技术问题,本实用新型提供椭圆印花机上料工作站,其特征在于包括升降机构、抓取机构、印花机台板,所述印花机台板右侧设置有升降机构,所述印花机台板右侧设置有抓取机构,所述抓取机构与升降机构的位置相互平行;
5.所述升降机构由取料台、工业相机、气缸、底板组成,所述印花机台板右侧设置有底板,所述底板上端通过螺栓安装有气缸,所述气缸通过外界plc控制,所述气缸通过伸缩轴安装有取料台,所述取料台右侧壁安装有工业相机,所述工业相机与外界信号转换器连接;
6.所述抓取机构由工业机器人、静电吸盘、吸附电极组成,所述印花机台板右侧设置有工业机器人,所述工业机器人与外界plc控制器连接,所述工业机器人右端连接有静电吸盘,所述静电吸盘内部安装有吸附电极,所述吸附电极与外界电源连接。
7.本实用新型的有益效果为:
8.本实用新型通过设置由工业机器人、静电吸盘、吸附电极组成的抓取机构,无需操作人员进行待印花布料的搬运、铺平,大大加快了工作速度,在加工过程中,首先通过工业相机进行照射,工业相机通过外界信号转换器将显示信号转化为电信号,再传递给外界plc控制器,工业机器人通过外界plc控制,进行工作,通过工业机器人带动静电吸盘活动,同时将静电吸盘与内部的吸附电极连通,吸附电极通电后产生吸引力,当静电吸盘下压到待印花布料时,通过吸引力将待印花布料与静电吸盘贴合,再由plc控制器的操控下,通过工业机器人带动静电吸盘与印花机台板对齐后,将静电吸盘下压到印花机台板上端,吸附电极断路吸附力解除,便可将待印花布料放置在取料台上端,此过程由于完全通过plc控制能够
保证待印花布料放置的精准度,通过此设计无需操作人员参加工作,大大提高了工作速度,保证了工作质量,加强了实用性;
9.本实用新型通过设置取料台、工业相机、气缸、底板组成的升降机构,无需工业机器人带动静电吸盘进行下降,简化工业机器人的程序,通过工业相机的照射能够实时对取料台上端堆叠的待印花布料进行照射,将待印花布料高度转化为电信号,当堆叠的待印花布料随着静电吸盘的抓取高度逐渐降低到一定高度时,电信号传递给外界plc控制器,此时气缸通过外界plc控制向上顶动,推送上端的取料台上升,这样便可始终保持取料台上端的待印花布料能够在静电吸盘的吸附力范围内,此设计进一步简化了工作过程,加强了实用性。
附图说明
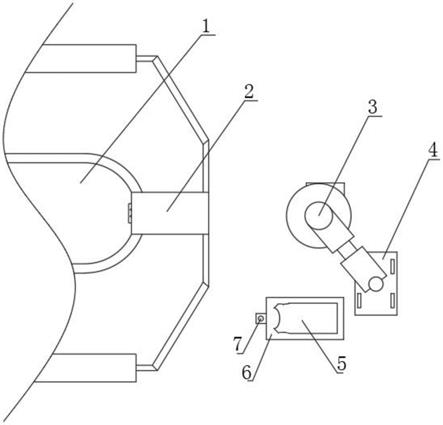
10.图1为本实用新型整体结构示意图;
11.图2为本实用新型静电吸盘内部结构示意图;
12.图3为本实用新型取料台与气缸连接结构示意图。
13.如图:1-椭圆印花机、2-印花机台板、3-工业机器人、4-静电吸盘、5-待印花布料、6-取料台、7-工业相机、8-气缸、9-底板、10-吸附电极。
具体实施方式
14.实施例1
15.本实用新型提供椭圆印花机1上料工作站,其特征在于包括升降机构、抓取机构、印花机台板2,印花机台板2右侧设置有升降机构,印花机台板2右侧设置有抓取机构,抓取机构与升降机构的位置相互平行;
16.升降机构由取料台6、工业相机7、气缸8、底板9组成,印花机台板2右侧设置有底板9,底板9上端通过螺栓安装有气缸8,气缸8通过外界plc控制,气缸8通过伸缩轴安装有取料台6,取料台6右侧壁安装有工业相机7,工业相机7与外界信号转换器连接;
17.抓取机构由工业机器人3、静电吸盘4、吸附电极10组成,印花机台板2右侧设置有工业机器人3,工业机器人3与外界plc控制器连接,工业机器人3右端连接有静电吸盘4,静电吸盘4内部安装有吸附电极10,吸附电极10与外界电源连接。
18.实施例2
19.本实用新型中印花机台板2安装在椭圆印花机1上端,取料台6上端堆叠有待印花布料5,在加工过程中,首先通过工业相机7进行照射,工业相机7通过外界信号转换器将显示信号转化为电信号,再传递给外界plc控制器,工业机器人3通过外界plc控制,进行工作,通过工业机器人3带动静电吸盘4活动,同时将静电吸盘4与内部的吸附电极10连通,吸附电极10通电后产生静电,当带有静电的静电吸盘4靠近不带静电的待印花布料5时,由于静电感应,没有静电的待印花布料5内部靠近带静电静电吸盘4的一边,会集聚与静电吸盘4所携带电荷相反极性的电荷,这时由于异性电荷互相吸引,就会表现出“静电吸附”现象,使得吸附电极10外侧的静电吸盘4产生吸力,当静电吸盘4下压到待印花布料5时,通过吸引力将待印花布料5与静电吸盘4贴合,再由plc控制器的操控下,通过工业机器人3带动静电吸盘4与印花机台板2对齐后,将静电吸盘4下压到印花机台板2上端,吸附电极10断路吸附力解除,
便可将待印花布料5放置在取料台6上端,此过程由于完全通过plc控制能够保证待印花布料5放置的精准度,且通过工业相机7的照射能够实时对取料台6上端堆叠的待印花布料5进行照射,将待印花布料5高度转化为电信号,当堆叠的待印花布料5随着静电吸盘4的抓取高度逐渐降低到一定高度时,电信号传递给外界plc控制器,此时气缸8通过外界plc控制向上顶动,推送上端的取料台6上升,这样便可始终保持取料台6上端的待印花布料5能够在静电吸盘4的吸附力范围内,无需工业机器人3进行下降,简化工业机器人3的程序。
20.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本实用新型提到的各个部件为现有领域常见技术,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.椭圆印花机上料工作站,其特征在于包括升降机构、抓取机构、印花机台板,所述印花机台板右侧设置有升降机构,所述印花机台板右侧设置有抓取机构,所述抓取机构与升降机构的位置相互平行;所述升降机构由取料台、工业相机、气缸、底板组成,所述印花机台板右侧设置有底板,所述底板上端通过螺栓安装有气缸,所述气缸通过伸缩轴安装有取料台,所述取料台右侧壁安装有工业相机;所述抓取机构由工业机器人、静电吸盘、吸附电极组成,所述印花机台板右侧设置有工业机器人,所述工业机器人与外界plc控制器连接,所述工业机器人右端连接有静电吸盘,所述静电吸盘内部安装有吸附电极。2.按照权利要求1所述的椭圆印花机上料工作站,其特征在于所述气缸通过外界plc控制。3.按照权利要求1所述的椭圆印花机上料工作站,其特征在于所述工业相机与外界信号转换器连接。4.按照权利要求1所述的椭圆印花机上料工作站,其特征在于所述吸附电极与外界电源连接。
技术总结
本实用新型提供椭圆印花机上料工作站,其特征在于包括升降机构、抓取机构、印花机台板,所述印花机台板右侧设置有升降机构,所述印花机台板右侧设置有抓取机构,所述抓取机构与升降机构的位置相互平行,所述升降机构由取料台、工业相机、气缸、底板组成,所述抓取机构由工业机器人、静电吸盘、吸附电极组成,所述印花机台板右侧设置有工业机器人,所述工业机器人与外界PLC控制器连接。此过程由于完全通过PLC控制能够保证待印花布料放置的精准度,通过此设计无需操作人员参加工作,大大提高了工作速度,保证了工作质量,加强了实用性,且此设计进一步简化了工作过程,加强了实用性。加强了实用性。加强了实用性。
技术研发人员:徐绍宸 李富海 周亚婷 徐浩伟 陈嘉栋 赵世明
受保护的技术使用者:吸力奇迹(天津)科技有限公司
技术研发日:2021.07.23
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1