一种能实现水平和竖直移动的刚性链升降装置的制作方法
1.本实用新型涉及升降装置技术领域,具体涉及一种能实现水平和竖直移动的刚性链升降装置。
背景技术:
2.现有的升降机构例如剪刀叉升降机,丝杠升降机,链条升降机等机构存在刚性差,强度低,稳定性差,定位精度低,最大行程一定时难以实现降到最低,难以实现定点定位,仅仅能满足货物的升降,使用单一。
技术实现要素:
3.鉴于现有技术中的上述缺陷或不足,期望提供一种能实现水平和竖直移动的刚性链升降装置。
4.根据本申请实施例提供的技术方案,一种能实现水平和竖直移动的刚性链升降装置,包括上平台、下平台、刚性链、中空轴减速机、电动机、旋转电机、旋转齿轮、履带和剪刀撑,
5.所述上平台和所述下平台均水平放置,所述上平台位于所述下平台的正上方,所述上平台和所述下平台通过所述刚性链和所述剪刀撑连接,所述剪刀撑的数量为两个,两个所述剪刀撑分别位于所述下平台上端面的前端部位和后端部位,两个所述剪刀撑分别位于所述上平台下端面的前端部位和后端部位,
6.两个所述剪刀撑通过水平纵向轴杆固定连接,所述剪刀撑下端部位的一端滑动连接所述下平台,所述剪刀撑下端部位的另一端铰接所述下平台,所述剪刀撑上端部位的一端滑动连接所述上平台,所述剪刀撑上端部位的另一端铰接所述上平台,
7.所述中空轴减速机、所述电动机、所述旋转电机均固定在所述下平台上,所述中空轴减速机、所述电动机固定在所述下平台的上端面,所述旋转电机固定在所述下平台的下端面,所述中空轴减速机连接所述电动机,所述刚性链连接所述中空轴减速机,所述刚性链的数量为两个,两个所述刚性链分别位于所述下平台上侧的前端部位和后端部位,所述刚性链的上端面固定连接所述上平台的下端面,
8.所述履带固定在所述下平台下端面,所述履带的数量为两个,两个所述履带分别位于所述下平台的前端部位和后端部位,所述旋转电机通过所述旋转齿轮与所述履带连接。
9.本实用新型中,所述上平台和所述下平台均为水平放置的框架方格式结构。
10.本实用新型中,所述上平台的长度大于所述下平台的长度,所述上平台的宽度大于所述下平台的宽度。
11.本实用新型中,所述下平台的上端面设有刚性链放置箱。
12.本实用新型中,所述刚性链为销齿链。
13.本实用新型中,所述旋转电机通过同步轮、水平纵向旋转轴杆与所述旋转齿轮连
接,所述旋转齿轮与所述履带的内表面啮合。
14.综上所述,本申请的有益效果:本申请装置采用中空轴减速机和电动机的连接,实现升降装置的精确度,采用履带实现升降装置的水平移动,适用范围较广。
附图说明
15.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
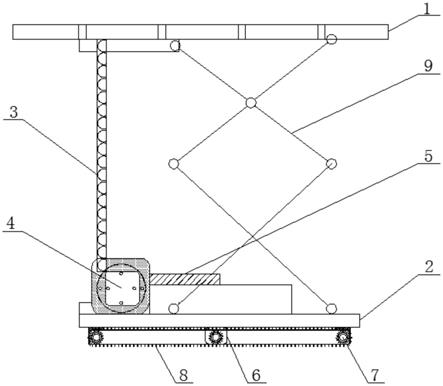
16.图1为本实用新型整体装置的立体结构示意图;
17.图2为本实用新型整体装置的正视剖面结构示意图。
18.图中标号:上平台-1;下平台-2;刚性链-3;中空轴减速机-4;电动机-5;旋转电机-6;旋转齿轮-7;履带-8;剪刀撑-9。
具体实施方式
19.下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
20.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
21.如图1和图2所示,一种能实现水平和竖直移动的刚性链升降装置,包括上平台1、下平台2、刚性链3、中空轴减速机4、电动机5、旋转电机6、旋转齿轮7、履带8和剪刀撑9,所述上平台1和所述下平台2均水平放置,所述上平台1位于所述下平台2的正上方,所述上平台1和所述下平台2通过所述刚性链3和所述剪刀撑9连接,所述剪刀撑9的数量为两个,两个所述剪刀撑9分别位于所述下平台2上端面的前端部位和后端部位,两个所述剪刀撑9分别位于所述上平台1下端面的前端部位和后端部位,两个所述剪刀撑9通过水平纵向轴杆固定连接,所述剪刀撑9下端部位的一端滑动连接所述下平台2,所述剪刀撑9下端部位的另一端铰接所述下平台2,所述剪刀撑9上端部位的一端滑动连接所述上平台1,所述剪刀撑9上端部位的另一端铰接所述上平台1,所述中空轴减速机4、所述电动机5、所述旋转电机6均固定在所述下平台2上,所述中空轴减速机4、所述电动机5固定在所述下平台2的上端面,所述旋转电机6固定在所述下平台2的下端面,所述中空轴减速机4连接所述电动机5,所述刚性链3连接所述中空轴减速机4,所述刚性链3的数量为两个,两个所述刚性链3分别位于所述下平台2上侧的前端部位和后端部位,所述刚性链3的上端面固定连接所述上平台1的下端面,所述履带8固定在所述下平台2下端面,所述履带8的数量为两个,两个所述履带8分别位于所述下平台2的前端部位和后端部位,所述旋转电机6通过所述旋转齿轮7与所述履带8连接。所述上平台1和所述下平台2均为水平放置的框架方格式结构。所述上平台1的长度大于所述下平台2的长度,所述上平台1的宽度大于所述下平台2的宽度。所述下平台2的上端面设有刚性链放置箱。所述刚性链3为销齿链。所述旋转电机6通过同步轮、水平纵向旋转轴杆与所述旋转齿轮7连接,所述旋转齿轮7与所述履带8的内表面啮合。
22.实施例1:所述上平台1和所述下平台2通过所述刚性链3和所述剪刀撑9连接,所述中空轴减速机4、所述电动机5固定在所述下平台2的上端面,所述旋转电机6固定在所述下
平台2的下端面,所述旋转电机6通过所述旋转齿轮7与所述履带8连接,所述旋转齿轮7套取在水平纵向轴杆上,水平纵向轴杆通过固定座固定在所述下平台2的下端面上,所述履带8内表面与所述旋转齿轮7啮合。所述旋转电机6通过同步带轮与所述旋转齿轮7套取的水平纵向轴杆连接。
23.实施例2:使用时,启动所述中空轴减速机4、所述电动机5,使得所述刚性链3从刚性链放置箱内拉出,支撑所述上平台1上移,在上移的过程中,所述剪刀撑9被撑开,使得所述上平台1实现平衡。由于所述中空轴减速机4的存在,使得所述上平台1升降的精确性得到大大的提高。
24.当需要水平移动本申请装置时,启动所述旋转电机6,所述旋转电机6通过同步带轮使得所述旋转齿轮7旋转,继而带动所述履带8运动,这样就能实现本申请装置的水平运动。
25.以上描述仅为本申请的较佳实施例以及对所运用技术原理等方案的说明。同时,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
技术特征:
1.一种能实现水平和竖直移动的刚性链升降装置,其特征是:包括上平台(1)、下平台(2)、刚性链(3)、中空轴减速机(4)、电动机(5)、旋转电机(6)、旋转齿轮(7)、履带(8)和剪刀撑(9),所述上平台(1)和所述下平台(2)均水平放置,所述上平台(1)位于所述下平台(2)的正上方,所述上平台(1)和所述下平台(2)通过所述刚性链(3)和所述剪刀撑(9)连接,所述剪刀撑(9)的数量为两个,两个所述剪刀撑(9)分别位于所述下平台(2)上端面的前端部位和后端部位,两个所述剪刀撑(9)分别位于所述上平台(1)下端面的前端部位和后端部位,两个所述剪刀撑(9)通过水平纵向轴杆固定连接,所述剪刀撑(9)下端部位的一端滑动连接所述下平台(2),所述剪刀撑(9)下端部位的另一端铰接所述下平台(2),所述剪刀撑(9)上端部位的一端滑动连接所述上平台(1),所述剪刀撑(9)上端部位的另一端铰接所述上平台(1),所述中空轴减速机(4)、所述电动机(5)、所述旋转电机(6)均固定在所述下平台(2)上,所述中空轴减速机(4)、所述电动机(5)固定在所述下平台(2)的上端面,所述旋转电机(6)固定在所述下平台(2)的下端面,所述中空轴减速机(4)连接所述电动机(5),所述刚性链(3)连接所述中空轴减速机(4),所述刚性链(3)的数量为两个,两个所述刚性链(3)分别位于所述下平台(2)上侧的前端部位和后端部位,所述刚性链(3)的上端面固定连接所述上平台(1)的下端面,所述履带(8)固定在所述下平台(2)下端面,所述履带(8)的数量为两个,两个所述履带(8)分别位于所述下平台(2)的前端部位和后端部位,所述旋转电机(6)通过所述旋转齿轮(7)与所述履带(8)连接。2.根据权利要求1所述的一种能实现水平和竖直移动的刚性链升降装置,其特征是:所述上平台(1)和所述下平台(2)均为水平放置的框架方格式结构。3.根据权利要求1所述的一种能实现水平和竖直移动的刚性链升降装置,其特征是:所述上平台(1)的长度大于所述下平台(2)的长度,所述上平台(1)的宽度大于所述下平台(2)的宽度。4.根据权利要求1所述的一种能实现水平和竖直移动的刚性链升降装置,其特征是:所述下平台(2)的上端面设有刚性链放置箱。5.根据权利要求1所述的一种能实现水平和竖直移动的刚性链升降装置,其特征是:所述刚性链(3)为销齿链。6.根据权利要求1所述的一种能实现水平和竖直移动的刚性链升降装置,其特征是:所述旋转电机(6)通过同步轮、水平纵向旋转轴杆与所述旋转齿轮(7)连接,所述旋转齿轮(7)与所述履带(8)的内表面啮合。
技术总结
本实用新型公开了一种能实现水平和竖直移动的刚性链升降装置,包括上平台、下平台、刚性链、中空轴减速机、电动机、旋转电机、旋转齿轮、履带和剪刀撑,所述上平台和所述下平台通过所述刚性链和所述剪刀撑连接,所述中空轴减速机、所述电动机、所述旋转电机均固定在所述下平台上,所述中空轴减速机连接所述电动机,所述刚性链连接所述中空轴减速机,所述履带固定在所述下平台下端面,所述旋转电机通过所述旋转齿轮与所述履带连接。本申请装置采用中空轴减速机和电动机的连接,实现升降装置的精确度,采用履带实现升降装置的水平移动,适用范围较广。围较广。围较广。
技术研发人员:丁刚 余永燚
受保护的技术使用者:天津龙格机器人技术有限公司
技术研发日:2021.09.01
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1