一种拖动式封止胶带粘连装置的制作方法
1.本实用新型涉及一种自动化粘连装置,特别是一种拖动式封止胶带粘连装置。
背景技术:
2.在许多行业中,都需要利用胶带进行粘连、密封等操作,传统的胶带粘连操作多为手工作业的方式,其作业方式落后,生产效率很低,严重的制约了产能和产量。同时人工操作还存在胶带粘连的距离难以精准定位和调节,粘连后切割不规范,工人劳动强度大,安全风险高,人工成本高等诸多问题。因此现在需要一种能够解决上述问题的方法或装置。
技术实现要素:
3.本实用新型是为了解决现有技术所存在的上述不足,提出一种结构简单,设计巧妙,布局合理,能够快速、方便、准确地实现封止胶带粘连的装置。
4.本实用新型的技术解决方案是:一种拖动式封止胶带粘连装置,其特征在于:所述的装置包括底板1,底板1上设置有相互平行的直线气缸2和滑轨3,所述滑轨3上滑动连接有滑座4,所述滑座4则与直线气缸2的工作端相连,在滑座4上设置有卡槽5,
5.所述底板1上还设置有支撑板6,所述支撑板6的顶部设置有胶带固定滚轮7,与所述胶带固定滚轮7相配的设置有两个限制滚轮8,同时在支撑板6上还设置有调节机构,
6.所述调节机构包括通过中心轴9转动连接在支撑板6上的摆杆10,所述摆杆10的顶端与弹簧11的一端连接,而弹簧11的另一端则直接连接在支撑板6上,摆杆10的底端则设置有导向槽12和压轮13,在支撑板6上还设置有气动剪刀14,所述气动剪刀14的刃部与压轮13的位置相配,
7.在底板1上还设置有传感器15,所述传感器15位于滑轨3的终点位置处。
8.本实用新型同现有技术相比,具有如下优点:
9.本种结构形式的拖动式封止胶带粘连装置,其结构简单,设计巧妙,布局合理,它针对传统的手工粘连封止胶带过程中所存在的种种问题,设计出一种特殊的结构,它利用直线气缸驱动被粘连的工件运动,工件运动过程中,其需要粘连的面会与压轮底部的封止胶带接触,并在此过程中让封止胶带粘连在工件上,而传感器检测到工件运动到位后,本装置中的气动剪刀又会自动将封止胶带剪断,从而实现自动化的胶带粘连操作。它的出现,可以节省大量的人力劳动和人力资源,同时提高工作效率和粘连质量,且切割操作可以精准控制,与传统手工操作方式相比,具有多种优点和好处,特别适合于在本领域中推广应用,其市场前景十分广阔。
附图说明
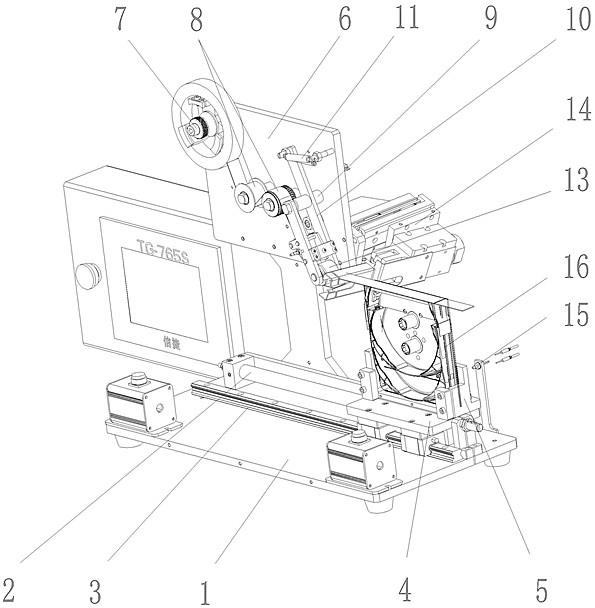
10.图1是本实用新型实施例的结构示意图。
11.图2是本实用新型实施例中调节机构的结构示意图。
具体实施方式
12.下面将结合附图说明本实用新型的具体实施方式。如图1、图2所示:一种拖动式封止胶带粘连装置,包括一个作为基础的底板1,底板1上设置有相互平行的直线气缸2和滑轨3,所述滑轨3上滑动连接有滑座4,所述滑座4则与直线气缸2的工作端相连,在滑座4上设置有卡槽5,
13.所述底板1上还设置有支撑板6,所述支撑板6的顶部设置有胶带固定滚轮7,与所述胶带固定滚轮7相配的设置有两个限制滚轮8,同时在支撑板6上还设置有调节机构,
14.所述调节机构包括通过中心轴9转动连接在支撑板6上的摆杆10,所述摆杆10的顶端与弹簧11的一端连接,而弹簧11的另一端则直接连接在支撑板6上,摆杆10的底端则设置有导向槽12和压轮13,在支撑板6上还设置有气动剪刀14,所述气动剪刀14的刃部与压轮13的位置相配,
15.在底板1上还设置有传感器15,所述传感器15位于滑轨3的终点位置处。
16.上述的直线气缸2、气动剪刀14和传感器15均通过控制系统统一进行控制。
17.本实用新型实施例的拖动式封止胶带粘连装置的工作过程如下:初始状态下,滑座4处于滑轨3的起点位置处,将需要粘连封止胶带的工件16扣在滑座4上的卡槽5中,实现定位;预先将封止胶带置于胶带固定滚轮7上,将胶带的端头抻出,蛇形缠绕在两个限制滚轮8上后,将胶带的端头送入导向槽12中,并使其位于压轮13的下方(胶面向下),至此,准备工作完成;
18.然后启动本装置,控制系统会控制直线气缸2工作,带动滑座4从滑轨3的起点方向运动至终点方向,当工件16的顶端面接触到封止胶带后,在压轮13的压力作用下,封止胶带会自动粘连在工件16的顶端面上,上述过程中,在弹簧11的作用下,摆杆10会始终对压轮13施加一个方向向下的力,从而保证在粘连胶带的过程中压轮13能够对胶带施加压力,以获得较好的粘连效果;
19.当工件16离开压轮13的范围、运动至滑轨3的终点位置处时,设置在此处的传感器15会检测到工件16运动到位,传感器15向控制系统发出信号,控制系统控制气动剪刀14工作,将封止胶带切断,操作人员将两端的突出部分的封止胶带向下捋顺,使其粘连在工件16的两个侧面上,即完成了对于工件的封止胶带粘连操作;
20.传感器15检测不到工件16时,说明完成粘连操作的工件已经被取走,则再次向控制系统发出信号,控制系统控制直线气缸2带动滑座4反向运动,重新回到滑轨3的起点位置处,操作人员将一个新的工件16插入卡槽5中,即可进行下一次的封止胶带粘连操作。
技术特征:
1.一种拖动式封止胶带粘连装置,其特征在于:所述的装置包括底板(1),底板(1)上设置有相互平行的直线气缸(2)和滑轨(3),所述滑轨(3)上滑动连接有滑座(4),所述滑座(4)则与直线气缸(2)的工作端相连,在滑座(4)上设置有卡槽(5),所述底板(1)上还设置有支撑板(6),所述支撑板(6)的顶部设置有胶带固定滚轮(7),与所述胶带固定滚轮(7)相配的设置有两个限制滚轮(8),同时在支撑板(6)上还设置有调节机构,所述调节机构包括通过中心轴(9)转动连接在支撑板(6)上的摆杆(10),所述摆杆(10)的顶端与弹簧(11)的一端连接,而弹簧(11)的另一端则直接连接在支撑板(6)上,摆杆(10)的底端则设置有导向槽(12)和压轮(13),在支撑板(6)上还设置有气动剪刀(14),所述气动剪刀(14)的刃部与压轮(13)的位置相配,在底板(1)上还设置有传感器(15),所述传感器(15)位于滑轨(3)的终点位置处。
技术总结
本实用新型公开一种拖动式封止胶带粘连装置,其特征在于:所述的装置包括底板(1),底板(1)上设置有相互平行的直线气缸(2)和滑轨(3),所述滑轨(3)上滑动连接有滑座(4),所述滑座(4)则与直线气缸(2)的工作端相连,在滑座(4)上设置有卡槽(5),所述底板(1)上还设置有支撑板(6),所述支撑板(6)的顶部设置有胶带固定滚轮(7),与所述胶带固定滚轮(7)相配的设置有两个限制滚轮(8),同时在支撑板(6)上还设置有调节机构。有调节机构。有调节机构。
技术研发人员:牛燕鹏 王川 殷长林 李德声 苍雨甜 邸磊
受保护的技术使用者:中国华录
技术研发日:2021.09.26
技术公布日:2022/7/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1