一种精准稳定型机械顶升台的制作方法
1.本实用新型属于机械技术领域,涉及一种输送用车,特别是一种精准稳定型机械顶升台。
背景技术:
2.以往升降载货形式为传统液压形式,经常会出现漏压的情况,无法配合巷道堆垛机叉取货物,液压油泄露不但污染仓储环境,而且浪费资源,增加维护成本,不能实现精准的升降操作,且无法提高工作效率。
3.因此,有必要对这样一种结构进行改善,以克服上述缺陷。
技术实现要素:
4.本实用新型的目的是针对现有的技术存在上述问题,提出了一种避免因载物重量不同导致压缩值不同的问题,确保上下定位精准的精准稳定型机械顶升台。
5.本实用新型的目的可通过下列技术方案来实现:一种精准稳定型机械顶升台,包括底部框架,所述底部框架上设置升降支架,其特征在于,所述底部框架上还固设升降电机和旋转轴,所述升降电机与所述旋转轴之间通过传动组件相连,所述旋转轴的端部固连升降摇臂,且所述旋转轴固穿于所述升降摇臂的偏心点上,所述升降摇臂的驱动端铰接于所述升降支架的底部上,所述升降支架的两侧壁呈对称开设竖直的导向槽,所述底部框架上呈左右对称铰接导轮组,两个所述导轮组一一对应嵌入两个所述导向槽内形成滑动连接。
6.在上述的精准稳定型机械顶升台中,所述底部框架的底部固设最低极限开关,顶部固设最高极限开关,所述升降支架上固设限位块,所述最低极限开关到所述最高极限开关之间为所述限位块的行程距离;所述底部框架上固设控制器,所述最低极限开关和所述最高极限开关均通过电路连接所述控制器,所述控制器电控连接所述升降电机。
7.在上述的精准稳定型机械顶升台中,所述传动组件包括固套于所述升降电机输出轴上的主动齿轮,还包括固套于所述旋转轴的从动齿轮,所述主动齿轮与所述从动齿轮之间通过传动链条相连。
8.在上述的精准稳定型机械顶升台中,所述传动组件包括固套于所述升降电机输出轴上的主动带轮,还包括固套于所述旋转轴的从动带轮,所述主动带轮与所述从动带轮之间通过传动皮带相连。
9.在上述的精准稳定型机械顶升台中,所述旋转轴的两端穿入轴承架形成转动连接,所述轴承架固装于所述底部框架上。
10.在上述的精准稳定型机械顶升台中,所述旋转轴的数量为两根,两根所述旋转轴呈对称布设于所述升降电机的两侧,每根所述旋转轴的两端各固连一个升降摇臂,所述升降摇臂的数量为四个。
11.在上述的精准稳定型机械顶升台中,所述升降摇臂的转动轴向呈水平设置。
12.在上述的精准稳定型机械顶升台中,所述升降支架上固连l型板,所述升降摇臂位
于所述升降支架的下端面与所述l型板之间。
13.与现有技术相比,本精准稳定型机械顶升台具有以下优点:
14.采用电机配合机械传动代替液压、气压驱动,从而避免因载物重量不同导致压缩值不同造成的升降位置误差大的问题,确保上下定位偏差值为固定的标准范围。同时能保持工作环境的洁净,作用可靠,使用寿命长,提高工作效率。
附图说明
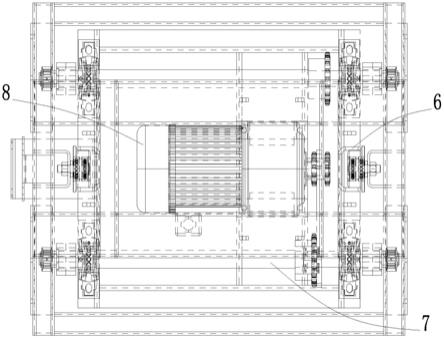
15.图1是本精准稳定型机械顶升台的俯视图。
16.图2是本精准稳定型机械顶升台的侧视图。
17.图3是本精准稳定型机械顶升台的正视图。
18.图中,1、底部框架;2、升降支架;3、调节座;4、导轮组;5、升降摇臂;6、导向槽;7、旋转轴;8、升降电机;9、l型板。
具体实施方式
19.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
20.实施例一
21.如图1至图3所示,本精准稳定型机械顶升台,包括底部框架1,底部框架1上设置升降支架2,底部框架1上还固设升降电机8和旋转轴7,升降电机8与旋转轴7之间通过传动组件相连,旋转轴7的端部固连升降摇臂5,且旋转轴7固穿于升降摇臂5的偏心点上,升降摇臂5的驱动端铰接于升降支架2的底部上,升降支架2的两侧壁呈对称开设竖直的导向槽6,底部框架1上呈左右对称铰接导轮组4,两个导轮组4一一对应嵌入两个导向槽6内形成滑动连接。
22.本精准稳定型机械顶升台的运作方法,控制器启动升降电机8,当升降电机8驱动两个旋转轴7转动时,升降摇臂5就环绕偏心点圆周运动,升降支架2抵接于升降摇臂5上,并受升降摇臂5圆周运动而上下移动,达到升降支架2的上升或下降功能。
23.底部框架1的底部固设最低极限开关,顶部固设最高极限开关,升降支架2上固设限位块,最低极限开关到最高极限开关之间为限位块的行程距离;底部框架1上固设控制器,最低极限开关和最高极限开关均通过电路连接控制器,控制器电控连接升降电机8。控制器通过调节座3固装于所述底部框架1上。
24.当限位块跟随升降支架2下降至靠近底部框架1的底部时,限位块抵触于最低极限开关,最低极限开关输出相应的感应信号给控制器,从而控制升降电机8关闭。当限位块跟随升降支架2上升至靠近底部框架1的顶部时,限位块抵触于最高极限开关,最高极限开关输出相应的感应信号给控制器,从而控制升降电机8关闭。由此升降支架2相对于底部框架1位于最低位置或最高位置。
25.传动组件包括固套于升降电机8输出轴上的主动齿轮,还包括固套于旋转轴7的从动齿轮,主动齿轮与从动齿轮之间通过传动链条相连。
26.旋转轴7的两端穿入轴承架形成转动连接,轴承架固装于底部框架1上。
27.旋转轴7的数量为两根,两根旋转轴7呈对称布设于升降电机8的两侧,每根旋转轴
7的两端各固连一个升降摇臂5,升降摇臂5的数量为四个。
28.升降摇臂5的转动轴向呈水平设置。
29.升降支架2上固连l型板9,升降摇臂5位于升降支架2的下端面与l型板9之间。当升降摇臂5向下转动时,升降摇臂5抵触于l型板9并带动l型板9向下移动,从而确保升降支架2跟随摇臂同步向下移动。
30.与现有技术相比,本精准稳定型机械顶升台具有以下优点:
31.采用电机配合机械传动代替液压、气压驱动,从而避免因载物重量不同导致压缩值不同造成的升降位置误差大的问题,确保上下定位偏差值为固定的标准范围。同时能保持工作环境的洁净,作用可靠,使用寿命长,提高工作效率。
32.实施例二
33.本实施例与实施例一基本相同,不同之处在于采用皮带、带轮传动机构代替链轮传动机构。
34.传动组件包括固套于升降电机8输出轴上的主动带轮,还包括固套于旋转轴7的从动带轮,主动带轮与从动带轮之间通过传动皮带相连。
35.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
36.尽管本文较多地使用了底部框架1;升降支架2;调节座3;导轮组4;升降摇臂5;导向槽6;旋转轴7;升降电机8;l型板9等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
技术特征:
1.一种精准稳定型机械顶升台,包括底部框架,所述底部框架上设置升降支架,其特征在于,所述底部框架上还固设升降电机和旋转轴,所述升降电机与所述旋转轴之间通过传动组件相连,所述旋转轴的端部固连升降摇臂,且所述旋转轴固穿于所述升降摇臂的偏心点上,所述升降摇臂的驱动端铰接于所述升降支架的底部上,所述升降支架的两侧壁呈对称开设竖直的导向槽,所述底部框架上呈左右对称铰接导轮组,两个所述导轮组一一对应嵌入两个所述导向槽内形成滑动连接。2.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述底部框架的底部固设最低极限开关,顶部固设最高极限开关,所述升降支架上固设限位块,所述最低极限开关到所述最高极限开关之间为所述限位块的行程距离;所述底部框架上固设控制器,所述最低极限开关和所述最高极限开关均通过电路连接所述控制器,所述控制器电控连接所述升降电机。3.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述传动组件包括固套于所述升降电机输出轴上的主动齿轮,还包括固套于所述旋转轴的从动齿轮,所述主动齿轮与所述从动齿轮之间通过传动链条相连。4.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述传动组件包括固套于所述升降电机输出轴上的主动带轮,还包括固套于所述旋转轴的从动带轮,所述主动带轮与所述从动带轮之间通过传动皮带相连。5.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述旋转轴的两端穿入轴承架形成转动连接,所述轴承架固装于所述底部框架上。6.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述旋转轴的数量为两根,两根所述旋转轴呈对称布设于所述升降电机的两侧,每根所述旋转轴的两端各固连一个升降摇臂,所述升降摇臂的数量为四个。7.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述升降摇臂的转动轴向呈水平设置。8.根据权利要求1所述的精准稳定型机械顶升台,其特征在于,所述升降支架上固连l型板,所述升降摇臂位于所述升降支架的下端面与所述l型板之间。
技术总结
本实用新型提供了一种精准稳定型机械顶升台,包括底部框架,底部框架上设置升降支架,底部框架上还固设升降电机和旋转轴,升降电机与旋转轴之间通过传动组件相连,旋转轴的端部固连升降摇臂,且旋转轴固穿于升降摇臂的偏心点上,升降摇臂的驱动端铰接于升降支架的底部上,升降支架的两侧壁呈对称开设竖直的导向槽,底部框架上呈左右对称铰接导轮组,两个导轮组一一对应嵌入两个导向槽内形成滑动连接。本实用新型采用电机配合机械传动代替液压、气压驱动,从而避免因载物重量不同导致压缩值不同造成的升降位置误差大的问题,确保上下定位偏差值为固定的标准范围。同时能保持工作环境的洁净,作用可靠,使用寿命长,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:蔡春梅
受保护的技术使用者:嘉兴立晟自动化设备有限公司
技术研发日:2021.11.01
技术公布日:2022/4/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1