一种多功能的双工位机器人吸夹具的制作方法
1.本实用新型涉及吸夹具技术领域,特别是一种多功能的双工位机器人吸夹具。
背景技术:
2.化妆品是指以涂抹、喷洒或者其他类似方法,散布于人体表面的任何部位,如皮肤、毛发、指趾甲、唇齿等,以达到清洁、保养、美容、修饰和改变外观,或者修正人体气味,保持良好状态为目的的化学工业品或精细化工产品,化妆品在生产过程中,需要对化妆品进行存放和包装,通常采用瓶体和罐体进行包装,采用瓶体包装时,瓶体通常是杂乱平躺着排列的,装化妆品时需要保持瓶体站立有序排列,因此,需要将瓶体从一道生产线夹取并排列在另一道生产线上,现有的将瓶体夹取搬运排列的过程,目前采用人工操作,人工成本较高,这不仅需要花费较多的成本,而且,搬运排列瓶体的工作效率低,无法满足正常的化妆品生产,为此,需要设计一种多功能的双工位机器人吸夹具,来降低成本,提高瓶体的搬运排列效率。
技术实现要素:
3.本实用新型的目的是为了解决上述问题,设计了一种多功能的双工位机器人吸夹具。
4.实现上述目的本实用新型的技术方案为,一种多功能的双工位机器人吸夹具,包括安装框架,所述安装框架上设置有旋转动力机构,所述安装框架上还设置有辅助轴承,所述旋转动力机构的输出端设置有与辅助轴承连接的旋转安装板,所述旋转安装板上设置有若干组伸缩控制组件,每组所述伸缩控制组件的两侧设置有导向机构,所述伸缩控制组件的输出端设置有气动夹紧组件,所述导向机构一端与所述气动夹紧组件连接。
5.作为本技术方案的进一步描述,所述安装框架包括安装主板,所述安装主板的两侧设置有安装侧板,所述旋转动力机构设置在安装侧板上,所述辅助轴承设置在另一片安装侧板上。
6.作为本技术方案的进一步描述,所述旋转动力机构包括设置在安装侧板上的旋转电机,所述旋转电机的输出端设置有与辅助轴承连接的旋转安装板。
7.作为本技术方案的进一步描述,所述伸缩控制组件包括设置在旋转安装板上的伸缩气缸,所述伸缩气缸的输出端连接有气动夹紧组件。
8.作为本技术方案的进一步描述,所述气动夹紧组件包括辅助安装板,所述辅助安装板通过连接块与伸缩气缸的输出端连接,所述辅助安装板上设置有气动夹子。
9.作为本技术方案的进一步描述,所述导向机构包括设置在旋转安装板上的导套,所述导套内设置有与连接块连接的导柱,所述导柱设置在伸缩气缸的两侧。
10.作为本技术方案的进一步描述,所述气动夹紧组件可替换为气动吸盘。
11.作为本技术方案的进一步描述,所述伸缩控制组件设置有两组。
12.其有益效果在于,此多功能的双工位机器人吸夹具,结构简单,实用性较强,且成
本较低,便于操作,运用此多功能的双工位机器人吸夹具,可以代替人工对瓶体进行夹取搬运排列,有效降低了对瓶体搬运排列的成本,同时,也提高了瓶体搬运排列的效率。
附图说明
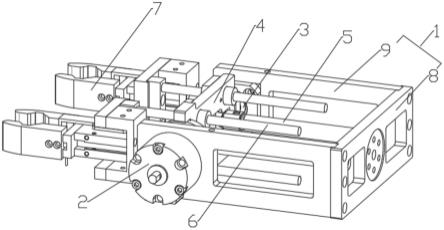
13.图1是本实用新型的整体结构示意图;
14.图2是本实用新型另一视角的整体结构示意图。
15.图中,1、安装框架;2、旋转动力机构;3、辅助轴承;4、旋转安装板;5、伸缩控制组件;6、导向机构;7、气动夹紧组件;8、安装主板;9、安装侧板;10、旋转电机;11、伸缩气缸;12、辅助安装板;13、连接块;14、气动夹子;15、导套;16、导柱。
具体实施方式
16.首先说明本实用新型的设计初衷,化妆品在生产过程中,需要对化妆品进行存放和包装,通常采用瓶体和罐体进行包装,采用瓶体包装时,瓶体通常是杂乱平躺着排列的,装化妆品时需要保持瓶体站立有序排列,因此,需要将瓶体从一道生产线夹取并排列在另一道生产线上,现有的将瓶体夹取搬运排列的过程,目前采用人工操作,人工成本较高,这不仅需要花费较多的成本,而且,搬运排列瓶体的工作效率低,无法满足正常的化妆品生产,因此,本实用新型设计了一种多功能的双工位机器人吸夹具。
17.下面结合附图对本实用新型进行具体描述,如图1-图2所示,一种多功能的双工位机器人吸夹具,包括安装框架1,安装框架1上设置有旋转动力机构2,安装框架1上还设置有辅助轴承3,所述旋转动力机构2的输出端设置有与辅助轴承3连接的旋转安装板4,安装框架1包括安装主板8,安装主板8的两侧设置有安装侧板9,旋转动力机构2设置在安装侧板9上,辅助轴承3设置在另一片安装侧板9上。
18.下面将详细介绍旋转动力机构2,旋转动力机构2包括设置在安装侧板9上的旋转电机10,旋转电机10的输出端设置有与辅助轴承3连接的旋转安装板4。
19.旋转安装板4上设置有若干组伸缩控制组件5,伸缩控制组件5设置有两组,每组所述伸缩控制组件5的两侧设置有导向机构6,所述伸缩控制组件5的输出端设置有气动夹紧组件7,所述导向机构6一端与所述气动夹紧组件7连接。
20.下面将详细介绍伸缩控制组件5的具体结构,伸缩控制组件5包括设置在旋转安装板4上的伸缩气缸11,伸缩气缸11的输出端连接有气动夹紧组件7,气动夹紧组件7可替换为气动吸盘。
21.气动夹紧组件7包括辅助安装板12,辅助安装板12通过连接块13与伸缩气缸11的输出端连接,辅助安装板12上设置有气动夹子14。
22.下面将详细介绍导向机构6的具体结构,导向机构6包括设置在旋转安装板4上的导套15,导套15内设置有与连接块13连接的导柱16,导柱16设置在伸缩气缸11的两侧。
23.上面详细的说明了本实用新型的具体结构,下面将说明本实用新型的工作原理:使用时,将安装框架1安装在机械手上,每组伸缩控制组件5可单独工作,通过气动夹紧组件7实现对瓶体的夹取,夹取后,通过旋转电机10带动旋转安装板4转动,使得瓶体呈站立状态,并将瓶体放置到下一道生产线上,此多功能的双工位机器人吸夹具,结构简单,实用性较强,且成本较低,便于操作,运用此多功能的双工位机器人吸夹具,可以代替人工对瓶体
进行夹取搬运排列,有效降低了对瓶体搬运排列的成本,同时,也提高了瓶体搬运排列的效率。
24.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
技术特征:
1.一种多功能的双工位机器人吸夹具,其特征在于,包括安装框架(1),所述安装框架(1)上设置有旋转动力机构(2),所述安装框架(1)上还设置有辅助轴承(3),所述旋转动力机构(2)的输出端设置有与辅助轴承(3)连接的旋转安装板(4),所述旋转安装板(4)上设置有若干组伸缩控制组件(5),每组所述伸缩控制组件(5)的两侧设置有导向机构(6),所述伸缩控制组件(5)的输出端设置有气动夹紧组件(7),所述导向机构(6)一端与所述气动夹紧组件(7)连接。2.根据权利要求1所述的一种多功能的双工位机器人吸夹具,其特征在于,所述安装框架(1)包括安装主板(8),所述安装主板(8)的两侧设置有安装侧板(9),所述旋转动力机构(2)设置在安装侧板(9)上,所述辅助轴承(3)设置在另一片安装侧板(9)上。3.根据权利要求2所述的一种多功能的双工位机器人吸夹具,其特征在于,所述旋转动力机构(2)包括设置在安装侧板(9)上的旋转电机(10),所述旋转电机(10)的输出端设置有与辅助轴承(3)连接的旋转安装板(4)。4.根据权利要求3所述的一种多功能的双工位机器人吸夹具,其特征在于,所述伸缩控制组件(5)包括设置在旋转安装板(4)上的伸缩气缸(11),所述伸缩气缸(11)的输出端连接有气动夹紧组件(7)。5.根据权利要求4所述的一种多功能的双工位机器人吸夹具,其特征在于,所述气动夹紧组件(7)包括辅助安装板(12),所述辅助安装板(12)通过连接块(13)与伸缩气缸(11)的输出端连接,所述辅助安装板(12)上设置有气动夹子(14)。6.根据权利要求5所述的一种多功能的双工位机器人吸夹具,其特征在于,所述导向机构(6)包括设置在旋转安装板(4)上的导套(15),所述导套(15)内设置有与连接块(13)连接的导柱(16),所述导柱(16)设置在伸缩气缸(11)的两侧。7.根据权利要求4所述的一种多功能的双工位机器人吸夹具,其特征在于,所述气动夹紧组件(7)可替换为气动吸盘。8.根据权利要求1所述的一种多功能的双工位机器人吸夹具,其特征在于,所述伸缩控制组件(5)设置有两组。
技术总结
本实用新型公开了一种多功能的双工位机器人吸夹具,包括安装框架,所述安装框架上设置有旋转动力机构,所述安装框架上还设置有辅助轴承,所述旋转动力机构的输出端设置有与辅助轴承连接的旋转安装板,所述旋转安装板上设置有若干组伸缩控制组件,每组所述伸缩控制组件的两侧设置有导向机构,所述伸缩控制组件的输出端设置有气动夹紧组件,所述导向机构一端与所述气动夹紧组件连接。本实用新型的有益效果是,此多功能的双工位机器人吸夹具,结构简单,实用性较强,且成本较低,便于操作,运用此多功能的双工位机器人吸夹具,可以代替人工对瓶体进行夹取搬运排列,有效降低了对瓶体搬运排列的成本,同时,也提高了瓶体搬运排列的效率。率。率。
技术研发人员:黄国哲
受保护的技术使用者:昆山骆比特机器人技术有限公司
技术研发日:2021.12.10
技术公布日:2022/6/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1