车辆控制装置以及方法与流程
本发明涉及控制对货物执行装卸的装卸车辆的技术。
背景技术:
1、目前,在物流、生产现场,使用处理货物的装卸车辆。作为装卸车辆的动作,执行自身移动的移动(行驶)、对货物的装卸。作为与装卸车辆的控制相关的技术,提出了专利文献1。在专利文献1中公开了与无人地进行行驶以及装卸的自动叉车相关的技术。在此,在执行基于装卸车辆的装卸时,有时作业员(人)进行辅助作业,或者与其他装卸车辆、装置(机器人等)协作。并且,也存在不是装卸对象的其他货物、垃圾等障碍物落到作业区域的情况。此外,将它们称为异物。
2、例如,自动叉车工作的环境大多是仓库、工厂、港口等与作业者混合的环境。作为用于实现这样的与包含人混合环境的异物的混合环境中的安全确保的技术,提出了专利文献2、非专利文献1。
3、因此,在专利文献2中公开了如下技术:在叉车进行行驶时,与叉车的周边的安全监视单元、基于叉车的行驶状态(转向角、速度等)在所述安全监视单元的监视区域内设定警戒区域的设定单元、以及在作业员侵入到所述警戒区域内的情况下进行预定的动作(警报鸣响等)的叉车的安全装置相关的技术。
4、另外,在非专利文献1中公开了叉车使安全监视单元(在文献内,personneldetection means:人检测单元)无效化时的步骤。即,根据非专利文献1,记载了在充分接近货物之后使安全监视单元无效化、以及在无效化状态下以极低速移动。
5、现有技术文献
6、专利文献
7、专利文献1:日本特开2017-019596号公报
8、专利文献2:日本特开2016-194481号公报
9、非专利文献
10、非专利文献1:iso3691-4 industrial trucks-safety requirements andverification part 4:driverless industrial trucks and their systems,4.8.2.3muting of the personnel detection means,pp.16,first edition 2020-02.
技术实现思路
1、发明所要解决的课题
2、在进行混合环境中的安全确保的专利文献2中,在叉车实施装卸作业的情况下,特别是在将叉爪刺入托盘的情况下,需要充分接近托盘。因此,需要暂时使搭载于叉车的安全监视单元无效化。另外,在非专利文献1中,若在周边有作业员的情况下使安全监视单元无效化,则之后无法检测作业员。
3、即,在专利文献2、非专利文献1中,如下这样难以兼顾混合环境下的装卸时的安全监视和装卸的效率化。在装卸车辆执行装卸时,若自身的传感器工作,则无法区别作为装卸对象的货物和作业员等。即,将货物误识别为作业员等,装卸无法进行。相反,在装卸车辆执行装卸时,若自身的传感器不工作,则无法检测作业员等的接近、危险。
4、因此,本发明的课题在于,在作业员等和装卸车辆混合存在的混合环境中,也能够实现装卸场所的周边的安全监视和装卸的效率化。
5、用于解决课题的手段
6、为了解决上述课题,在本发明中,准备对车辆安全监视范围进行监视的第一安全监视装置和对安全监视区域进行监视的第二安全监视装置,使它们根据装卸车辆的动作的状况而协作地发挥功能。作为其一个方式,在本发明中,在执行装卸时,在使用第二安全监视装置确认了安全监视区域中的安全状态的情况下,变更第一安全装置的车辆安全监视范围。此外,该变更包括无效化。
7、更具体而言,一种车辆控制装置,其控制装卸车辆中的包含移动和装卸的动作,所述车辆控制装置具有:运算处理部,其生成用于控制所述动作的控制指示;通信部,其与控制所述装卸车辆的行驶的行驶控制装置和控制所述装卸车辆的装卸动作的装卸控制装置连接,并输出所述控制指示;以及输入输出部,其与第一安全监视装置连接,所述第一安全监视装置监视车辆安全监视范围,并能够输出用于使所述装卸车辆的动作停止的安全状态数据,所述运算处理部在执行所述装卸车辆中的装卸时的、第二安全监视装置对覆盖所述车辆安全监视范围的安全监视区域的监视结果表示安全状态的情况下,通过变更所述车辆安全监视范围,能够执行所述装卸车辆的所述装卸。
8、另外,本发明包括使用了车辆控制装置的车辆控制方法。另外,还包括用于使车辆控制装置发挥功能的程序、存储有该程序的存储介质。
9、发明效果
10、根据本发明,能够安全且高效地执行装卸车辆中的装卸等动作。
技术特征:
1.一种车辆控制装置,其控制装卸车辆中的包含移动和装卸的动作,其特征在于,所述车辆控制装置具有:
2.根据权利要求1所述的车辆控制装置,其特征在于,
3.根据权利要求1所述的车辆控制装置,其特征在于,
4.根据权利要求1所述的车辆控制装置,其特征在于,
5.一种车辆控制方法,使用了对装卸车辆中的包含移动和装卸的动作进行控制的车辆控制装置,其特征在于,所述车辆控制装置具有:
6.根据权利要求5所述的车辆控制方法,其特征在于,
7.根据权利要求5所述的车辆控制方法,其特征在于,
8.根据权利要求5所述的车辆控制方法,其特征在于,
技术总结
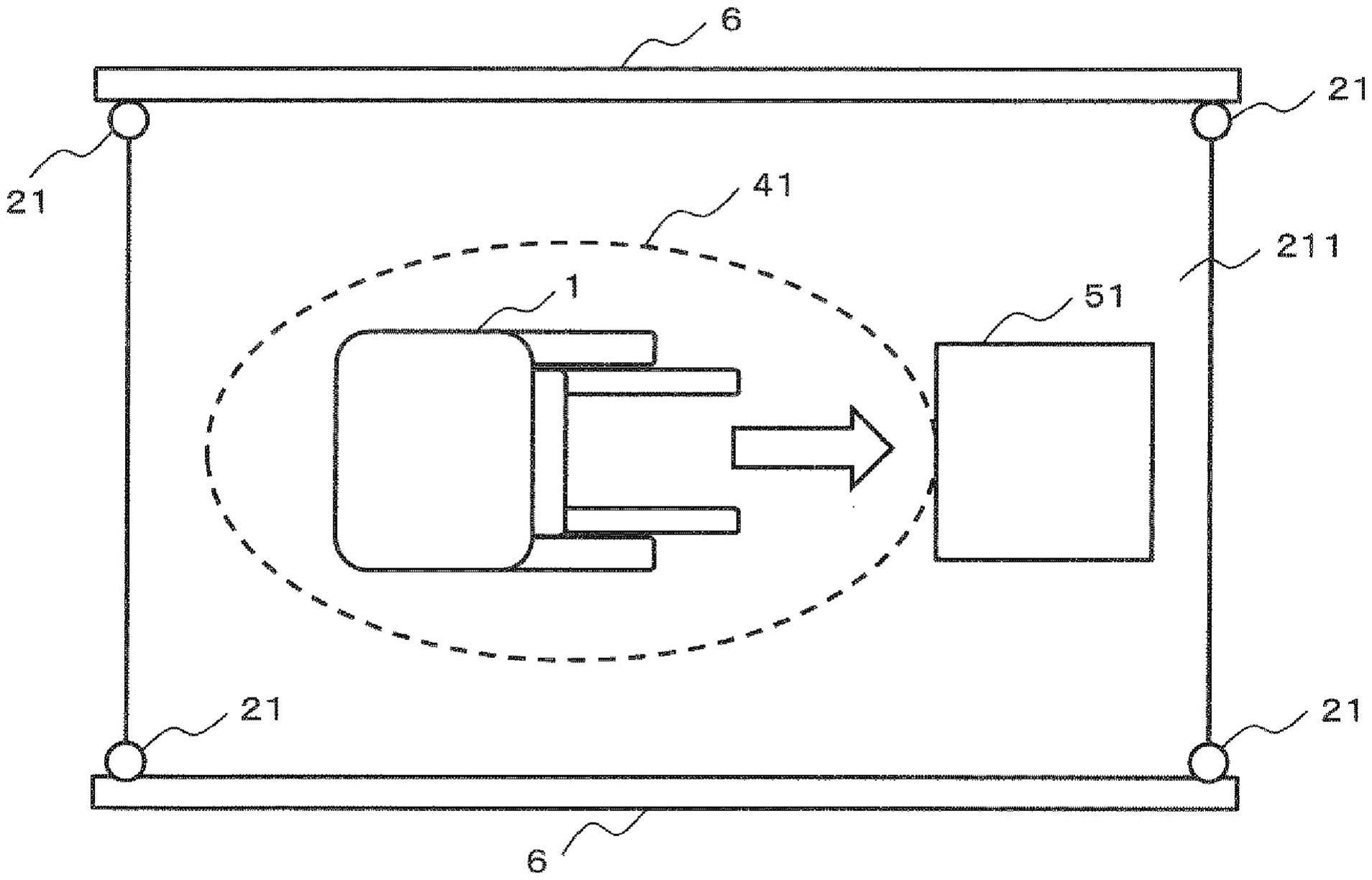
在本发明中,以安全且高效地执行自动叉车1等装卸车辆中的装卸等动作为课题。为了解决上述的课题,在本发明中,准备监视车辆安全监视范围(4)的激光扫描仪(2)和监视安全监视区域(211)的激光幕帘(21),使它们根据自动叉车(1)的动作的状况进行协作而发挥功能。作为其一方式,在本发明中,在执行装卸时,在使用激光幕帘(21)确认了安全监视区域(211)中的安全状态的情况下,通过使激光扫描仪(2)的车辆安全监视范围(4)无效化,来设定车辆安全监视无效化范围(41)。
技术研发人员:吉村健太郎,渡边夏美,伊藤诚也,小野达矢
受保护的技术使用者:株式会社日立制作所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!