一种起重机吊钩消摆、臂架减震控制系统及控制方法与流程
1.本发明涉及一种起重机吊钩消摆、臂架减震控制系统及控制方法,属于工程机械履带式起重机电液控制技术领域。
背景技术:
2.起重机是机械设备中重要的一个分类,在基础设施建设、风电建设、核电建设、石化建设等起到重要的作用。
3.起重机由于其桁架臂机构,吊钩通过钢丝绳穿绕位置于桁架臂臂头的滑轮组跟桁架臂臂头软性连接,近似形成单摆钟摆系统。
4.起重机在运行过程中,不可避免的存在负载回转以及行走等动作。在车辆行走以及负载回转过程中,车辆运行速度变化,导致吊装负载物的运动落后桁架臂臂头的运动,从而在桁架臂臂头和吊物间形成夹角,在重力的作用下,吊装负载物会来回摆动。
5.对于吊装负载物的来回摆动的问题,目前最为常用的做法是需要非常熟练的操作工手动操作控制吊装负载物的来回摆动。吊装负载物的来回摆动会加速机械磨损,特别是桁架臂以及传动机构。同时延长吊装负载物的转运时间,甚至造成安全事故。
6.目前起重机还没有完备的消摆方案,通用的做法仍是通过操作手的工作经验来完成吊钩防摇摆控制。人工消摆是通过反向运行车辆,通过反向运行来消除吊载载荷摆动能量,使负载可以快速停止摆动,此种方式对臂架结构、回转传动机有较大载荷冲击,影响车辆使用寿命。同时此种方式因全靠司机经验操作,操作频繁,易造成司机疲劳,形成安全隐患。
技术实现要素:
7.本发明的目的在于克服现有技术中的不足,提供一种起重机吊钩消摆、臂架减震控制系统及控制方法,能够快速实现起重机吊钩消摆控制及臂架减震控制,避免对桁架臂的冲击。为达到上述目的,本发明是采用下述技术方案实现的:第一方面,本发明提供一种起重机吊钩消摆、臂架减震控制系统,包括:陀螺仪,安装在吊钩上,用于读取吊钩倾斜角度、角速度和重力加速度;卷扬编码器,安装在卷扬上,用于测算吊钩位置距离桁架臂臂头的距离;控制器,设于操控室,与所述陀螺仪和卷扬编码器通信连接,接收陀螺仪读取的数据和卷扬编码器测算的数据,根据接收到的数据进行计算,执行操作。
8.结合第一方面,进一步地,还包括用于实现陀螺仪与控制器的通信连接的can总线陀螺仪传输模块,所述can总线陀螺仪传输模块的输入端连接陀螺仪,输出端连接控制器。
9.结合第一方面,进一步地,还包括用于实现卷扬编码器与控制器的通信连接的can总线卷扬传输模块,所述can总线卷扬传输模块的输入端连接卷扬编码器,输出端连接控制器。
10.第二方面,本发明提供一种起重机吊钩消摆控制方法,包括起重机行走或负载回
转时的基于开环的输入整形控制方法,包括:控制器根据卷扬编码器测算的吊钩位置距离桁架臂臂头的距离,计算负载钟摆运动的周期t;控制器获取车辆行走或回转时整车产生的脉冲震荡周期为t的响应波形a1;控制器在响应波形a1的t/2位置,触发与响应波形a1的波形相反的脉冲震荡周期为t的震荡波形a2;响应波形a1与震荡波形a2的脉冲叠加,实现吊钩消摆控制。
11.结合第二方面,进一步地,开环控制方法通过控制信号实现控制,所述控制信号通过下式表示:a(t)=a1(t)+a2(t+t/2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式(1)中,a(t)表示控制信号,a1(t)表示响应波形a1信号,a2(t+t/2)表示震荡波形a2信号。
12.结合第二方面,进一步地,还包括起重机停止时基于闭环的输入整形控制方法,包括:控制器根据卷扬编码器测算的吊钩位置距离桁架臂臂头的距离,计算负载钟摆运动的周期t;控制器根据陀螺仪读取的吊钩倾斜角度、角速度,得到吊钩摇摆波形a3;控制器触发与吊钩摇摆波形a3的波形相反的震荡波形a2;摇摆波形a3与震荡波形a2的脉冲叠加,实现吊钩消摆控制。
13.结合第二方面,优选地,当吊钩位置距离桁架臂臂头的距离超过160米时,负载钟摆运动的周期t会超过24s,会导致所述起重机吊钩消摆控制方法因延迟严重而停止。
14.结合第二方面,进一步地,所述控制器触发的震荡波形a2,随着响应波形a1/吊钩摇摆波形a3的变化而变化。
15.第三方面,本发明提供一种起重机臂架减震控制方法,包括:控制器根据陀螺仪读取的重力加速度,得到臂架载荷状态;响应于臂架突然卸荷,根据陀螺仪读取的重力加速度,得到臂架震荡波形a4;控制器在臂架顶点施加与臂架震荡波形a4的波形相反的脉冲波形a5;所述脉冲波形a5用于控制臂架变幅方向,消除臂架震荡。
16.结合第三方面,进一步地,所述臂架突然卸荷指:重力加速度在预设时间段δt内增大至9.8m/s2。
17.第四方面,本发明提供一种起重机,应用如第二方面所述的起重机吊钩消摆控制方法和第三方面所述的起重机臂架减震控制方法。
18.与现有技术相比,本发明实施例所提供的一种起重机吊钩消摆、臂架减震控制系统及控制方法所达到的有益效果包括:本发明一种起重机吊钩消摆、臂架减震控制系统,包括陀螺仪,安装在吊钩上,用于读取吊钩倾斜角度、角速度和重力加速度;卷扬编码器,安装在卷扬上,用于测算吊钩位置距离桁架臂臂头的距离;控制器,设于操控室,与所述陀螺仪和卷扬编码器通信连接,接收陀螺仪读取的数据和卷扬编码器测算的数据,根据接收到的数据进行计算,执行操作。本发明通过控制器配合卷扬编码器和陀螺仪,实现吊钩消摆和臂架减震,不影响起重机的行
走、负载回转以及变幅操作;本发明提供了一种起重机吊钩消摆控制方法,包括起重机行走或负载回转时的基于开环的输入整形控制方法和起重机停止时的基于闭环的输入整形控制方法,产生震荡波形进行叠加消摆;本发明能够自动消除吊装负载物在运行过程中的来回摆动,操作简洁方便,避免依赖司机的经验操作,避免司机疲劳造成的安全隐患,能够更高效地完成吊装负载物的转运;本发明提供了一种起重机臂架减震控制方法,在臂架顶点施加与臂架震荡波形相反的脉冲波形消除臂架震荡;本发明减少避免臂架突然卸荷时臂架震荡,减少对臂架的载荷冲击,操作简洁方便,避免依赖司机的经验操作,避免司机疲劳造成的安全隐患,能够更高效地完成吊装负载物的转运,延长起重机的使用寿命。
附图说明
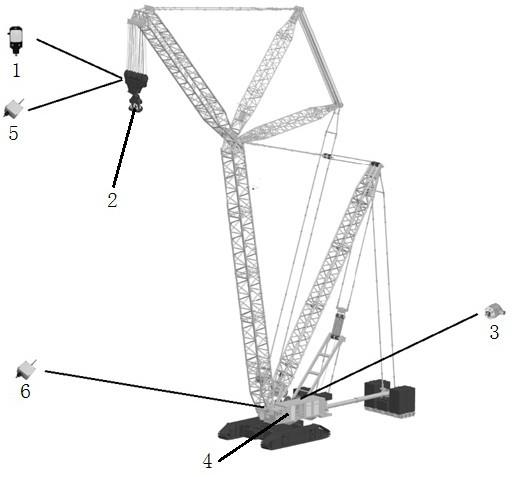
19.图1是本发明实施例1中一种起重机吊钩消摆、臂架减震控制系统的结构简图;图2是本发明实施例2中一种起重机吊钩消摆控制方法中开环控制的流程图;图3是本发明实施例2中一种起重机吊钩消摆控制方法中闭环控制的流程图;图4是本发明实施例2中一种起重机吊钩消摆控制方法中消摆的波形图;图5是本发明实施例2中一种起重机臂架减震控制方法的控制简图。
20.图中:1、陀螺仪;2、吊钩;3、卷扬编码器;4、控制器;5、操控室。
具体实施方式
21.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
22.实施例1:本实施例提供一种起重机吊钩2消摆、臂架减震控制系统,包括陀螺仪1、can总线陀螺仪传输模块5、卷扬编码器3、can总线卷扬传输模块6和控制器。如图1所示,陀螺仪1安装在吊钩2上,卷扬编码器3安装在卷扬上,控制器设于操控室4。
23.陀螺仪1用于读取吊钩2倾斜角度、角速度和重力加速度。can总线陀螺仪传输模块5的输入端连接陀螺仪1,输出端连接控制器,实现陀螺仪1与控制器的通信连接。
24.卷扬编码器3用于测算吊钩2位置距离桁架臂臂头的距离。can总线卷扬传输模块6的输入端连接陀螺仪1,输出端连接控制器,实现卷扬编码器3与控制器的通信连接。
25.控制器接收陀螺仪1读取的数据和卷扬编码器3测算的数据,根据接收到的数据进行计算,执行操作。
26.实施例2:本实施例提供一种起重机吊钩2消摆控制方法,包括:起重机行走或负载回转时的基于开环的输入整形控制方法和起重机停止时的基于闭环的输入整形控制方法。
27.如图2所示,基于开环的输入整形控制方法,包括:控制器根据卷扬编码器3测算的吊钩2位置距离桁架臂臂头的距离,计算负载钟摆运动的周期t;控制器获取车辆行走或回转时整车产生的脉冲震荡周期为t的响应波形a1;
控制器在响应波形a1的t/2位置,触发与响应波形a1的波形相反的脉冲震荡周期为t的震荡波形a2;如图4所示,响应波形a1与震荡波形a2的脉冲叠加,实现吊钩2消摆控制。
28.如图3所示,基于闭环的输入整形控制方法,包括:控制器根据卷扬编码器3测算的吊钩2位置距离桁架臂臂头的距离,计算负载钟摆运动的周期t;控制器根据陀螺仪1读取的吊钩2倾斜角度、角速度,得到吊钩2摇摆波形a3;控制器触发与吊钩2摇摆波形a3的波形相反的震荡波形a2;摇摆波形a3与震荡波形a2的脉冲叠加,实现吊钩2消摆控制。
29.开环控制方法通过控制信号实现控制,所述控制信号通过下式表示:a(t)=a1(t)+a2(t+t/2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式(1)中,a(t)表示控制信号,a1(t)表示响应波形a1信号,a2(t+t/2)表示震荡波形a2信号。
30.需要说明的是,控制器触发的震荡波形a2,随着响应波形a1/吊钩2摇摆波形a3的变化而变化。
31.需要说明的是,当吊钩2位置距离桁架臂臂头的距离超过160米时,负载钟摆运动的周期t会超过24s,会导致所述起重机吊钩2消摆控制方法因延迟严重而停止。
32.采用本发明的起重机吊钩2消摆控制方法,能够自动消除吊装负载物在运行过程中的来回摆动,操作简洁方便,避免依赖司机的经验操作,避免司机疲劳造成的安全隐患,能够更高效地完成吊装负载物的转运;实施例3:如图5所示,本实施例提供了一种起重机臂架减震控制方法,包括:控制器根据陀螺仪1读取的重力加速度,得到臂架载荷状态;响应于臂架突然卸荷,根据陀螺仪1读取的重力加速度,得到臂架震荡波形a4;控制器在臂架顶点施加与臂架震荡波形a4的波形相反的脉冲波形a5;所述脉冲波形a5用于控制臂架变幅方向,消除臂架震荡。
33.臂架突然卸荷指:重力加速度在预设时间段δt内增大至9.8m/s2。
34.采用本发明的起重机臂架减震控制方法,能够减少避免臂架突然卸荷时臂架震荡,减少对臂架的载荷冲击,操作简洁方便,避免依赖司机的经验操作,避免司机疲劳造成的安全隐患,能够更高效地完成吊装负载物的转运,延长起重机的使用寿命。
35.实施例4:本实施例提供了一种起重机,应用如实施例2所述的起重机吊钩2消摆控制方法和实施例3所述的起重机臂架减震控制方法。
36.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1