一种电梯曳引机增加电梯行程效率的控制方法与流程
1.本发明涉及电梯曳引机控制技术领域,特别涉及一种利用电梯曳引机抱闸微动开关反馈讯号提高电梯行程效率的控制方法。
背景技术:
2.电梯曳引机利用抱闸微动开关来判断抱闸是否完全释放为一常见的感测方式。现有启动时序中,多采用由主控器输出松闸讯号再延迟固定时间后,轿厢开始走行。其主要原因为现场工况会影响松闸讯号输出后到实际完全松闸的时间。
3.现有固定延迟时间的方法虽然可以根据可调的参数来保证电梯走行时不会带闸运行,但却因此也延长了关门后到轿厢走行的这段时间。
技术实现要素:
4.本发明提供一种电梯曳引机抱闸微动开关反馈讯号提高电梯行程效率的控制方法,其特点在于以抱闸微动开关为确认抱闸是否确实释放,达到抱闸释放后电梯可以尽快开始走行的效果。
5.为了实现上述发明目的,本发明的一种电梯曳引机增加电梯行程效率的控制方法,其特征是:在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行。
6.在本发明的一个优选实施例中,在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行的具体步骤如下:
7.步骤一:判断关门到位后,进入启动程序;
8.步骤二:输出松闸之讯号;
9.步骤三:此时监测抱闸微动开关反馈讯号决定走行时间点;
10.步骤四:若抱闸微动开关累积满一段时间仍未动作,则做成故障。
11.由于采用了如上的技术方案,本发明以微动开关,将关门到位后到轿厢走行的时间由固定有效缩短,增加电梯走行效率。
附图说明
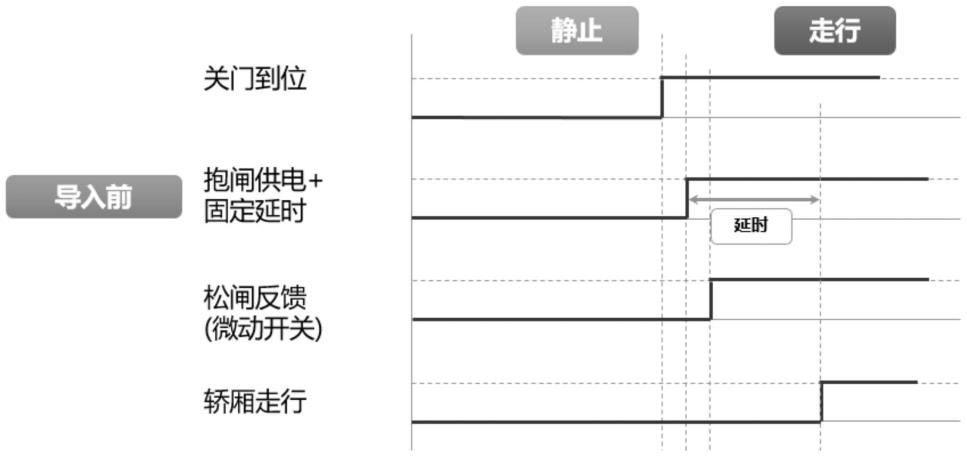
12.图1为导入抱闸微动开关前松闸走行时序图。
13.图2为导入抱闸微动开关后松闸走行时序图。
14.图3为导入抱闸微动开关后松闸判断流程图。
具体实施方式
15.以下结合附图和具体实施方式来进一步描述本发明。
16.参见图1,现有轿厢启动补偿方式中,多采抱闸讯号由主控器输出后且在固定延迟时间后,轿厢开始走行。
17.参见图2和图3,本发明的一种电梯曳引机增加电梯行程效率的控制方法,其特征
是:在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行,具体步骤如下:
18.步骤一:判断关门是否到位,如到位后,则进入步骤二的松闸供电,如否则继续判断关门是否到位;
19.步骤二:输出松闸讯号;
20.步骤三:此时监测微动开关讯号决定走行时间点并输出轿厢走行讯号;
21.步骤四:若抱闸微动开关累积满一段时间仍未动作,则做成故障。
技术特征:
1.一种电梯曳引机增加电梯行程效率的控制方法,其特征是:在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行。2.如权利要求1所述的一种电梯曳引机增加电梯行程效率的控制方法,其特征是:在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行的具体步骤如下:步骤一:判断关门到位后,进入启动程序;步骤二输出松闸之讯号;步骤三:此时监测抱闸微动开关讯号决定走行时间点;步骤四:若抱闸微动开关累积满一段时间仍未动作,则做成故障。
技术总结
本发明公开的一种电梯曳引机增加电梯行程效率的控制方法,其特征是:在侦测到抱闸微动开关的抱闸释放反馈讯号后,以此为依据快速走行。本发明将关门到位后到轿厢走行的时间由固定有效缩短,增加电梯走行效率。增加电梯走行效率。增加电梯走行效率。
技术研发人员:王翊仲 胡伟楠 周根富
受保护的技术使用者:永大电梯设备(中国)有限公司
技术研发日:2022.09.08
技术公布日:2023/1/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1