一种塔机限位方法、控制系统及存储介质与流程
本发明涉及作业设备控制领域,尤其涉及一种塔机限位方法、控制系统及存储介质。
背景技术:
1、在工业、生产、建筑等领域,经常需要很多作业设备,有些设备的工作和运行具有一定的危险性,因此在操控上需要具备相应的安全保障。
2、以塔机(塔式起重机,亦称塔吊)为例,塔机是动臂装在高耸塔身上部的旋转式起重机。其工作范围大,主要用于多层和高层建筑施工中材料的垂直运输和构件安装。组成上主要包括金属结构、工作机构和电气系统三部分,金属结构包括塔身、动臂、底座、附着杆等;工作机构有起升、变幅、回转和行走四部分;电气系统包括电动机、控制器、配电框、联连线路、信号及照明装置等。
3、由于塔机工作位置高、可变幅、可旋转和可升降,在运行时存在一定安全风险,因此在塔机上的在升降、变幅和回转等功能上均布置有相应的限位装置,以免升降、变幅和回转动作超出安全范围。然而这种方式,需要在多个地方布置,不进费时费力、成本增加,而且维护不变,在发生故障时因排查不便造成停机过长进而影响施工建设周期。
4、针对上述问题,亟待本领域技术人员从技术上改善和解决。
技术实现思路
1、有鉴于此,本发明实施例旨提供一种塔机限位方法、控制系统及存储介质,能够在功能、策略或软件层面实现对塔机的起升、变幅和回转实施变幅控制,有效减少了在各个位置所需布置的硬件或装置数量,并且能够保障塔机安全运行,还在实施部署、控制调节和故障维护上均较为灵活和方便,降低了相应成本。
2、第一方面,本发明实施例提供了一种塔机限位方法,该塔机限位方法包括:获取塔机起升编码器、变幅编码器和回转编码器的信息;根据所述起升编码器、所述变幅编码器和所述回转编码器的信息计算获得塔机的当前起升位置、当前变幅位置和当前回转位置;判断所述当前起升位置、所述当前变幅位置或所述当前回转位置是否达到限速范围,并在达到时根据预定限速策略作出相应控制。
3、进一步地,所述方法还包括:获取塔机不同档位的档位信息;所述在达到时根据预定策略作出相应控制具体为:根据当前所处的档位及对应的预定限速策略作出相应控制。
4、进一步地,当所述起升前位置、所述当前变幅位置或者所述当前回转位置处于相应的第一限位范围时,降低起升、变幅或者回转的速度;当所述起升前位置、所述当前变幅位置或者所述当前回转位置处于相应的第二限位范围时,停止起升、变幅或者回转的速度。
5、进一步地,起升的第一限位范围为小于起升最远位置20%并大于起升最远位置10%的范围以及大于起升最远位置80%并小于起升最远位置90%的范围,起升的第二限位范围为小于起升最远位置10%的范围以及大于起升最远位置90%的范围;和/或,变幅的第一限位范围为小于变幅最远位置20%并大于变幅最远位置10%的范围以及大于变幅最远位置80%并小于起升变幅位置90%的范围,变幅的第二限位范围为小于变幅最远位置10%的范围以及大于变幅最远位置90%的范围;和/或,在回转初始位置为0的条件下,回转的第一限位范围为小于-480°并大于-510°的范围以及大于-480°并小于510°的范围,回转的第二限位范围为-510°的范围以及大于510°的范围。
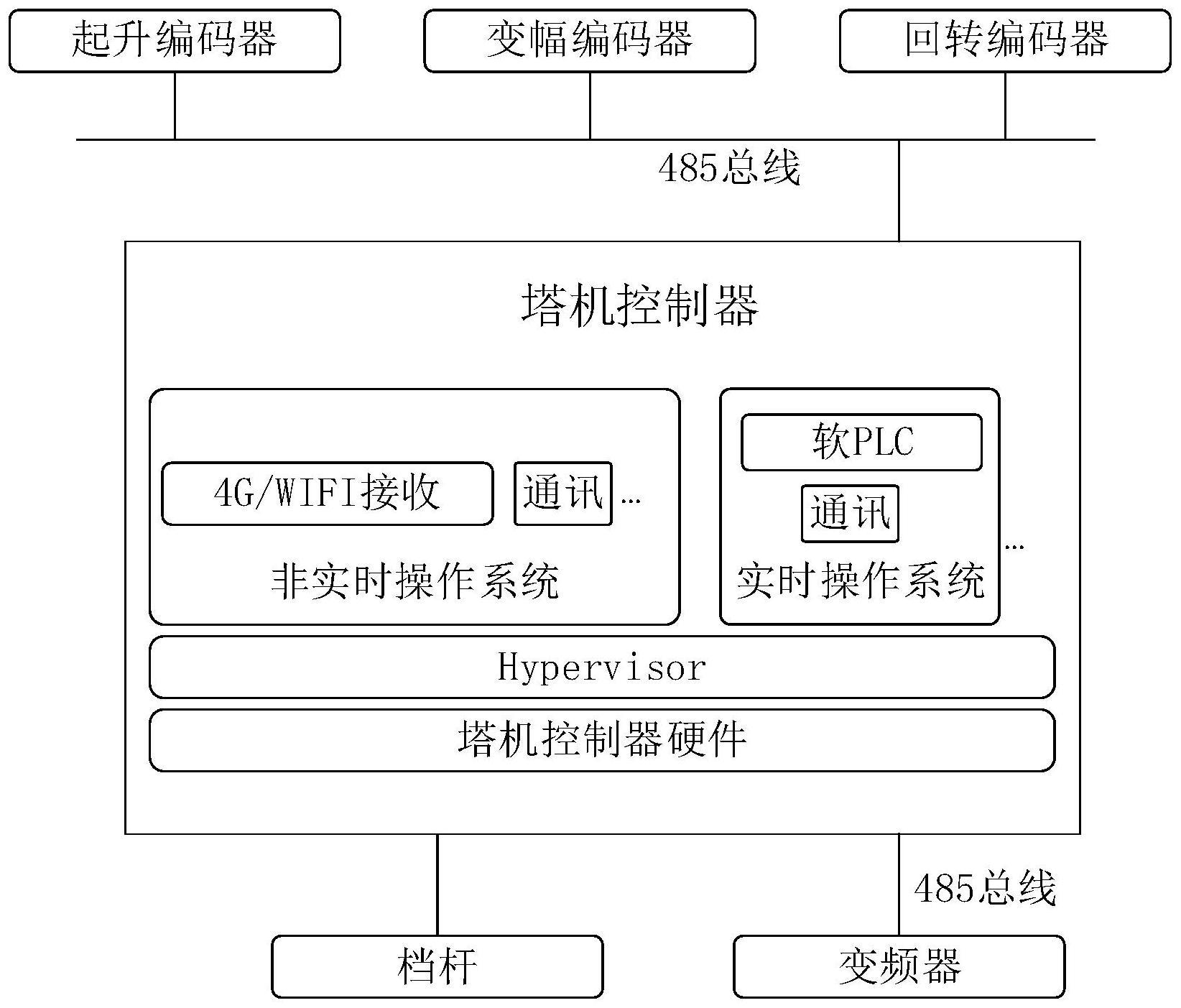
6、第二方面,本发明实施例提供了一种塔机控制系统,该塔机控制系统包括塔机控制器,所述塔机控制器包括信息获取单元、信息处理单元和判断控制单元,其中:信息获取单元用于获取塔机起升编码器、变幅编码器和回转编码器的信息;信息处理单元用于根据所述起升编码器、所述变幅编码器和所述回转编码器的信息计算获得塔机的当前起升位置、当前变幅位置和当前回转位置;判断控制单元用于判断所述当前起升位置、所述当前变幅位置或所述当前回转位置是否达到限速范围,并在达到时根据预定限速策略作出相应控制。
7、进一步地,所述信息获取单元还用于获取塔机不同档位的档位信息,所述判断控制单元在达到限速范围时根据当前所处的档位及对应的预定限速策略作出相应控制。
8、进一步地,所述塔机控制系统还包括档杆,所述塔机控制器的输入与档杆的不同档位输出连接。
9、进一步地,所述塔机控制系统还包括起升编码器、变幅编码器和回转编码器,所述起升编码器、所述变幅编码器和所述回转编码器的输出与所述塔机控制器的输入连接。
10、进一步地,所述塔机控制系统还包括用于对塔机起升、变幅和回转实现调速的变频器,所述塔机控制器的输出与所述变频器的输入连接。
11、第三方面,本发明实施例还提供了一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现前述任一项所述的塔机限位方法,或者实现前述任一项塔机控制系统中塔机控制器所述的功能。
12、采用本发明各实施例的技术方案后,能够在功能、策略或软件层面实现对塔机的起升、变幅和回转实施变幅控制,有效减少了在各个位置所需布置的硬件或装置数量,并且能够保障塔机安全运行,而且在实施部署、控制调节和故障维护上均较为灵活和方便,降低了相应成本。
技术特征:
1.一种塔机限位方法,其特征在于,所述方法包括:
2.如权利要求1所述的塔机限位方法,其特征在于,所述方法还包括:获取塔机不同档位的档位信息;所述在达到时根据预定策略作出相应控制具体为:根据当前所处的档位及对应的预定限速策略作出相应控制。
3.如权利要求1或2所述的塔机限位方法,其特征在于,当所述起升前位置、所述当前变幅位置或者所述当前回转位置处于相应的第一限位范围时,降低起升、变幅或者回转的速度;当所述起升前位置、所述当前变幅位置或者所述当前回转位置处于相应的第二限位范围时,停止起升、变幅或者回转的速度。
4.如权利要求3所述的塔机限位方法,其特征在于:起升的第一限位范围为小于起升最远位置20%并大于起升最远位置10%的范围以及大于起升最远位置80%并小于起升最远位置90%的范围,起升的第二限位范围为小于起升最远位置10%的范围以及大于起升最远位置90%的范围;和/或,变幅的第一限位范围为小于变幅最远位置20%并大于变幅最远位置10%的范围以及大于变幅最远位置80%并小于起升变幅位置90%的范围,变幅的第二限位范围为小于变幅最远位置10%的范围以及大于变幅最远位置90%的范围;和/或,在回转初始位置为0的条件下,回转的第一限位范围为小于-480°并大于-510°的范围以及大于-480°并小于510°的范围,回转的第二限位范围为-510°的范围以及大于510°的范围。
5.一种塔机控制系统,包括塔机控制器,其特征在于,所述塔机控制器包括信息获取单元、信息处理单元和判断控制单元,其中:
6.如权利要求5所述的塔机控制系统,其特征在于,所述信息获取单元还用于获取塔机不同档位的档位信息,所述判断控制单元在达到限速范围时根据当前所处的档位及对应的预定限速策略作出相应控制。
7.如权利要求6所述的塔机控制系统,其特征在于,所述塔机控制系统还包括档杆,所述塔机控制器的输入与档杆的不同档位输出连接。
8.如权利要求5至7任一项所述的塔机控制系统,其特征在于,所述塔机控制系统还包括起升编码器、变幅编码器和回转编码器,所述起升编码器、所述变幅编码器和所述回转编码器的输出与所述塔机控制器的输入连接。
9.如权利要求5至7任一项所述的塔机控制系统,其特征在于,所述塔机控制系统还包括用于对塔机起升、变幅和回转实现调速的变频器,所述塔机控制器的输出与所述变频器的输入连接。
10.一种存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1至4任一项所述的方法,或者实现权利要求5至9任一项塔机控制系统中塔机控制器所述的功能。
技术总结
本发明公开了一种塔机限位方法、控制系统及存储介质。该塔机限位方法包括:获取塔机起升编码器、变幅编码器和回转编码器的信息;根据所述起升编码器、所述变幅编码器和所述回转编码器的信息计算获得塔机的当前起升位置、当前变幅位置和当前回转位置;判断所述当前起升位置、所述当前变幅位置或所述当前回转位置是否达到限速范围,并在达到时根据预定限速策略作出相应控制。实施本发明,可在功能、策略或软件层面实现对塔机的起升、变幅和回转实施变幅控制,减少在各个位置所需布置的硬件或装置数量,能够保障塔机安全运行,且在实施、控制和维护上均较为灵活和方便,降低了相应成本。
技术研发人员:刘洲印,赵平,郭丽萍,施宏杰,郑文东,吕志勇
受保护的技术使用者:北京东土科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!