电堆自动堆叠视觉快速对正控制方法与流程
本发明涉及电堆堆叠,具体为电堆自动堆叠视觉快速对正控制方法。
背景技术:
1、随着新能源的不断发展,匹配的自动化生产线应运而生,堆叠是氢燃料电池中关键的一个工艺步骤,为了实现快速并且高准确度的生产,视觉纠偏找正是非常重要的,关系到电池成品后的质量和安全性,传统的视觉纠偏找正是把数据传输给机器人等运动机构去实现,这种方式涉及视觉和机构的多次标定和数据传输,在精度、速度和易用性方面都差强人意,传统方法上有以下缺点:
2、1)在传统的视觉定位系统中,视觉和运动机构是两个独立的系统,分别有自己的坐标系;实现对位引导的原理是:把两个坐标系统一,一般是把视觉的坐标系,统一成运动机构的坐标系,这里面就涉及一个坐标转换的算法,即标定,因为是两个独立的系统进行交互,由于交互的关系在标定的过程中,因此标定误差是不可避免的;
3、2)在传统的视觉定位系统中,视觉和运动机构是两个独立的系统;在调试的时候需要双方的专业人员进行都在场进行联合调试,后续一方出现问题,都需要另一方配合一起解决,维护繁琐;
4、3)在传统的视觉定位系统中,视觉和运动机构是两个独立的系统,数据交互需要通过通讯的方式来实现,及视觉识别出工件的坐标,需要走tcp、modbus或总线的方式通讯给运动系统,运动系统解析后再控制机构运动,复杂而且耗时;
5、4)传统机器人记录的拍照位置,人工容易误操作而改变拍照位置,一旦位置更改,整套系统都需要重新调试;
6、针对上述问题本领域人员还有提升的空间,我公司针对现有的生产线进行升级改造,提出了一种电堆自动堆叠视觉快速对正控制方法。
技术实现思路
1、本发明的目的在于提供电堆自动堆叠视觉快速对正控制方法,以解决上述背景技术中提出氢电池自动堆叠过程中的精度、速度和易用性这三方面的视觉对正控制的问题。
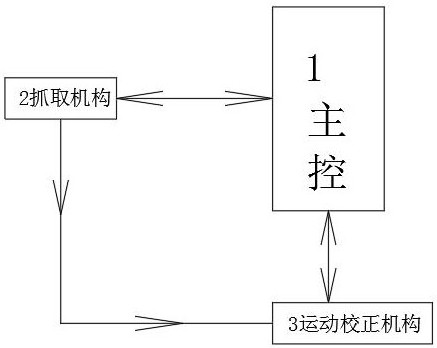
2、为实现上述目的,本发明提供如下技术方案:电堆自动堆叠视觉快速对正控制方法,包括主机、抓取机构和运动校正机构,抓取机构前端设有视觉装置,具体为五个方法步骤如下:
3、s1、抓取机构通过物料仓抓取电堆材料,无拍照识别抓取;
4、s2、抓取机构将抓取的物料放置到运动校正机构的上端;
5、s3、抓取机构的上端的视觉装置将图像传输到主机中进行坐标判断,计算出校正坐标指令;
6、s4、主机分析后的坐标指令电信号传输给运动校正机构,运动校正机构按照主机内分析后的坐标指令进行运动,达到最后的标定位置;
7、s5、抓取机构将运动校正机构上的校正好的物料抓取后进行堆叠。
8、优选的:抓取机构为机械臂或者上下料机设备,抓取机构的头部设有气动夹爪,运动校正机构为十字滑台。
9、进一步的:所述抓取机构、运动校正机构和视觉装置都通过导线与主机电性连接。
10、优选的:所述视觉装置为距离传感器和摄像头,传感器用于探测目标物之间的距离,所述摄像头用于采集图像数据。
11、进一步的:所述主机为plc控制器,plc控制器中含有一个标定和控制系统,即对位系统。
12、与现有技术相比,本发明的有益效果是:
13、1、精度提升:视觉系统和运动机构都由视觉来控制,在一个软件(一个控制主机)里面实现了视觉和运动机构的标定,可以认为是左手和右手的交互,这样最大程度避免了标定误差,实测标定误差减少了4倍以上;
14、2、速度的提升:在一个软件(一个控制主机)内实现了坐标的交互,不需要通讯,简化了流程,提升速度;
15、3、易用性的提升:由于视觉和运动机构都有一个系统来控制,调试和后续的维护都更便捷;
16、独创了一键式全自动手(机械手/滑台等运动机构)眼(视觉)标定方式,手眼标定的时候只需要点击标定流程,运动机构会自动按照设定好的点位自动走位置,同时视觉自动记录机构坐标,进行自动标定,这种模式第一是调试快捷,效率比传统的手动标定提升了20倍以上,第二是对后期维护人员特别友好,设备交付现场后,如发生故障需要重新标定,客户不需要专业的视觉和运动机构的工程师,就可以按照说明,进行简单的几部操作来实现,极大的提升了设备的稼动率;
17、坐标位置采用相对坐标,原点位即是拍照位,位置不易丢失,即使丢失,只需要重新示教一下零点位置即可;在操作方面也是极大的提高了工作效率和降低了工位的调试难度系数。
技术特征:
1.电堆自动堆叠视觉快速对正控制方法,其特征在于:包括主机(1)、抓取机构(2)和运动校正机构(3),抓取机构(2)前端设有视觉装置,方法步骤如下:
2.根据权利要求1所述的电堆自动堆叠视觉快速对正控制方法,其特征在于:抓取机构(2)为机械臂或者上下料机设备,抓取机构(2)的头部设有气动夹爪,运动校正机构(3)为十字滑台。
3.根据权利要求1所述的电堆自动堆叠视觉快速对正控制方法,其特征在于:所述抓取机构(2)、运动校正机构(3)和视觉装置都通过导线与主机(1)电性连接。
4.根据权利要求1所述的电堆自动堆叠视觉快速对正控制方法,其特征在于:所述视觉装置为距离传感器和摄像头,传感器用于探测目标物之间的距离,所述摄像头用于采集图像数据。
5.根据权利要求1所述的电堆自动堆叠视觉快速对正控制方法,其特征在于:所述主机(1)为plc控制器,plc控制器中含有一个标定和控制系统,即对位系统。
技术总结
本发明公开了电堆自动堆叠视觉快速对正控制方法,涉及电堆堆叠技术领域,包括五步法:抓取物料、移动放置、拍照分析、校正、抓取堆叠,本发明在一个控制主机里面实现了视觉和运动机构的标定,最大程度避免了标定误差,实测标定误差减少了4倍以上;不需要通讯,简化了流程,提升速度;调试和后续的维护都更便捷;独创了一键式全自动手眼标定方式,手眼标定的时候只需要点击标定流程,运动机构会自动按照设定好的点位自动走位置,同时视觉自动记录机构坐标,进行自动标定,效率比传统的手动标定提升了20倍以上,对后期维护人员特别友好,极大的提升了设备的稼动率;在操作方面也是极大的提高了工作效率和降低了工位的调试难度系数。
技术研发人员:陈世超,史策,袁付贵
受保护的技术使用者:大连豪森瑞德设备制造有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!