伸缩式桁架臂和工程机械的制作方法
本申请涉及起重机吊装领域,特别涉及一种伸缩式桁架臂和工程机械。
背景技术:
1、桁架臂相比箱型臂具有重量轻、承载能力强的优势,但桁架臂式履带起重机的臂节需要拆散通过板车运输,到工作场地后再组装起来,相比箱型伸缩臂起重机无需组装臂架,需要大量的拆装臂架的时间,严重制约施工效率。目前国内已推出几款伸缩式桁架臂履带起重机产品,但受结构限制,臂节的主弦杆多为l型拼焊结构、方形拼焊结构,焊缝繁多,制造成本极高,现有相关专利也提出了部分解决方案,但都存在明显不足。
2、在此需要说明的是,该背景技术部分的陈述仅提供与本申请有关的背景技术,并不必然构成现有技术。
技术实现思路
1、本申请提供一种伸缩式桁架臂和工程机械,以方便转场作业及狭小作业空间施工。
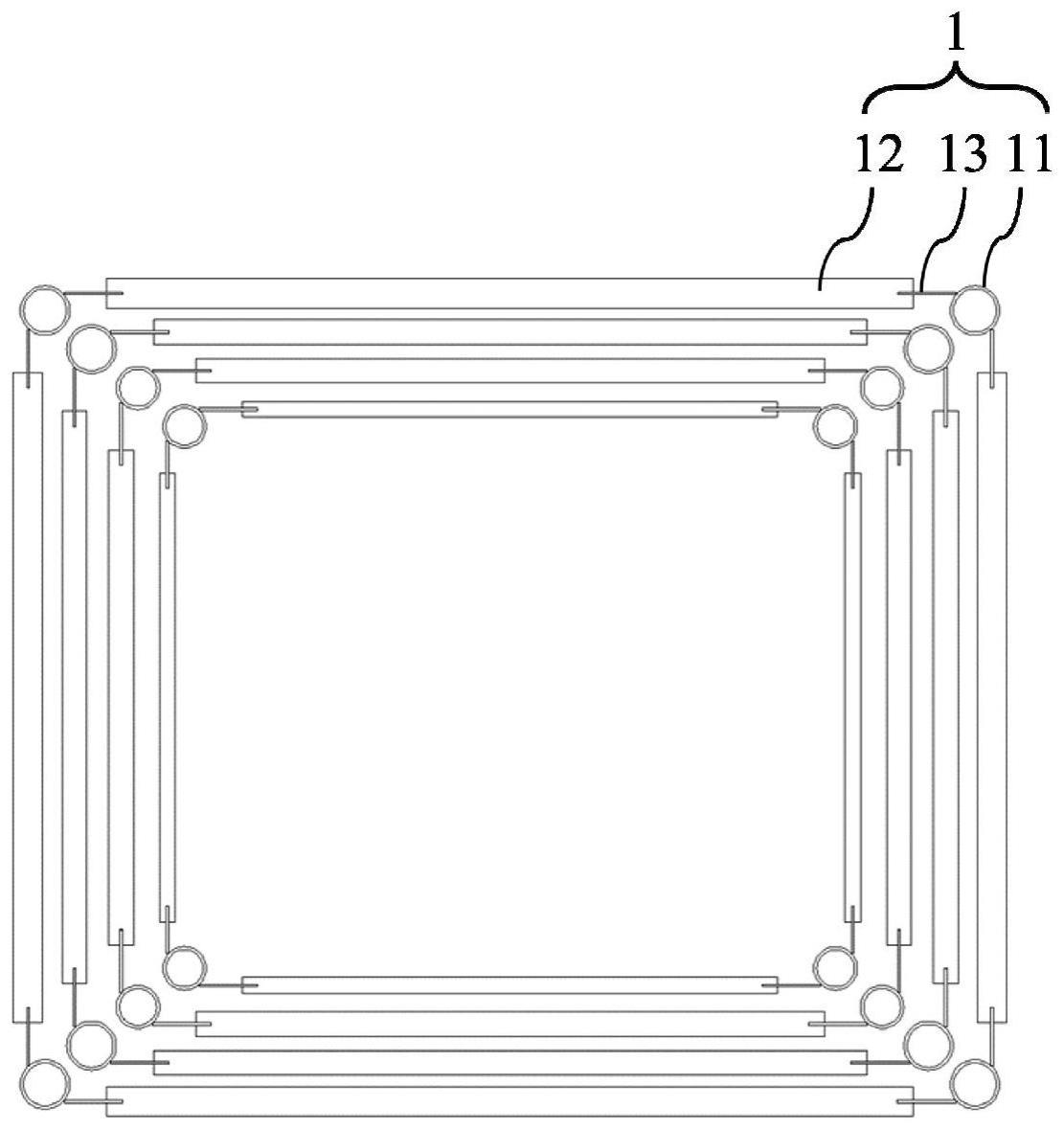
2、本申请第一方面提供一种伸缩式桁架臂。伸缩式桁架臂包括依次套设的至少三层臂节。臂节包括多个臂节面和滑块组件。每个臂节面包括两个主弦杆、多个腹杆以及多个连接板。两个主弦杆平行间隔设置。主弦杆的至少一端设置有滑块组件。多个腹杆设置在两个主弦杆之间。连接板连接腹杆和主弦杆。连接板的厚度小于腹杆的厚度。
3、在一些实施例中,连接板包括在主弦杆的周向方向上的不同位置处布置的第一连接板和第二连接板。第一连接板和第二连接板分别位于相邻的两个臂节面上。
4、在一些实施例中,滑块组件包括安装座和滑块本体。滑块本体可拆卸地安装在安装座上。
5、在一些实施例中,滑块组件还包括盖板和安装槽。安装槽设置在安装座上。滑块本体通过安装槽放置在安装座上。盖板用于在滑块本体放置在安装座上后与安装座连接以遮挡安装槽的槽口并固定滑块本体。
6、在一些实施例中,位于最外层的臂节的主弦杆的顶端设置有滑块组件,位于最内层的臂节的主弦杆的底端设置有滑块组件,且其余层的臂节的主弦杆的顶端和底端分别设置有滑块组件。
7、在一些实施例中,滑块组件具有导向面。导向面的形状与主弦杆的截面形状适配。相邻两层臂节中内层的臂节的主弦杆被配置为通过导向面相对于外层的臂节的主弦杆可滑动。最外层臂节的顶端的滑块组件的导向面向内设置。最内层臂节的底端的滑块组件的导向面向外设置。其余层臂节为中间层臂节。中间层臂节的顶端的滑块组件的导向面向内设置。中间层臂节的底端的滑块组件的导向面向外设置。
8、在一些实施例中,主弦杆的截面形状为圆形。
9、在一些实施例中,臂节的截面形状包括矩形。
10、在一些实施例中,腹杆的截面形状为圆形。
11、本申请第二方面提供一种工程机械,包括如上所述的伸缩式桁架臂、变幅机构以及底座。伸缩式桁架臂的第一端与底座转动连接。桁架臂的第二端用于连接作业机构。变幅机构与伸缩式桁架臂驱动连接以驱动伸缩式桁架臂变幅。
12、基于本申请提供的技术方案,伸缩式桁架臂包括依次套设的至少三层臂节。臂节包括多个臂节面和滑块组件。每个臂节面包括两个主弦杆、多个腹杆以及多个连接板。两个主弦杆平行间隔设置。主弦杆的至少一端设置有滑块组件。多个腹杆设置在两个主弦杆之间。连接板连接腹杆和主弦杆。连接板的厚度小于腹杆的厚度。由于连接板的板状的特点,在相邻两层臂节之间保留了较大的空间,通过该空间安装滑块组件,使得内层臂节可以顺畅的滑动且能够实现更多层的臂节的套设。新套设的臂节依然采用连接板来连接主弦杆和腹杆,因此新一层的臂节和相邻层臂节之间仍存在安装滑块的空间,新一层臂节仍可顺畅滑动。在增大伸缩式桁架臂的伸缩幅度的同时,保障各臂节的滑动平顺性和承载能力,提升工程机械的作业适用性。在最大作业高度不变的前提下,更多层的臂节的套设就使得各个臂节完全缩回时桁架臂的整体长度更小,方便转场作业及狭小作业空间施工。
13、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种伸缩式桁架臂,其特征在于,所述伸缩式桁架臂包括依次套设的至少三层臂节(1),所述臂节(1)包括多个臂节面和滑块组件(14),每个臂节面包括:
2.根据权利要求1所述的伸缩式桁架臂,其特征在于,所述连接板(13)包括在所述主弦杆(11)的周向方向上的不同位置处布置的第一连接板(131)和第二连接板(132),所述第一连接板(131)和所述第二连接板(132)分别位于相邻的两个臂节面上。
3.根据权利1所述的伸缩式桁架臂,其特征在于,所述滑块组件(14)包括安装座(141)和滑块本体(142),所述滑块本体(142)可拆卸地安装在所述安装座(141)上。
4.根据权利要求3所述的伸缩式桁架臂,其特征在于,所述滑块组件(14)还包括盖板(143)和安装槽(144),所述安装槽(144)设置在所述安装座(141)上,所述滑块本体(142)通过所述安装槽(144)放置在所述安装座(141)上,所述盖板(143)用于在所述滑块本体(142)放置在所述安装座(141)上后,与所述安装座(141)连接以遮挡所述安装槽(144)的槽口并固定所述滑块本体(142)。
5.根据权利要求1所述的伸缩式桁架臂,其特征在于,位于最外层的臂节(1)的主弦杆的顶端设置有所述滑块组件(14),位于最内层的臂节(1)的主弦杆的底端设置有所述滑块组件(14),且其余层的臂节(1)的主弦杆的顶端和底端分别设置有所述滑块组件(14)。
6.根据权利要求5所述的伸缩式桁架臂,其特征在于,所述滑块组件(14)具有导向面(a),所述导向面(a)的形状与所述主弦杆(11)的截面形状适配,相邻两层所述臂节(1)中内层的臂节(1)的主弦杆(11)被配置为通过所述导向面(a)相对于外层的臂节(1)的主弦杆(11)可滑动,最外层臂节的顶端的滑块组件(14)的导向面(a)向内设置,最内层臂节的底端的滑块组件(14)的导向面(a)向外设置,其余层臂节为中间层臂节,中间层臂节的顶端的滑块组件(14)的导向面(a)向内设置,中间层臂节的底端的滑块组件(14)的导向面(a)向外设置。
7.根据权利要求1所述的伸缩式桁架臂,其特征在于,所述主弦杆(11)的截面形状为圆形。
8.根据权利要求1所述的伸缩式桁架臂,其特征在于,所述臂节(1)的截面形状包括矩形。
9.根据权利要求1所述的伸缩式桁架臂,其特征在于,所述腹杆(12)的截面形状为圆形。
10.一种工程机械,其特征在于,包括如权利要求1至9中任一项所述的伸缩式桁架臂、变幅机构以及底座,所述伸缩式桁架臂的第一端与所述底座转动连接,所述桁架臂的第二端用于连接作业机构,所述变幅机构与所述伸缩式桁架臂驱动连接以驱动所述伸缩式桁架臂变幅。
技术总结
本申请公开了一种伸缩式桁架臂和工程机械。伸缩式桁架臂包括依次套设的至少三层臂节。臂节包括多个臂节面和滑块组件。每个臂节面包括两个主弦杆、多个腹杆和多个连接板。两个主弦杆平行间隔设置。主弦杆的至少一端设有滑块组件。多个腹杆设置在两个主弦杆间。连接板连接腹杆和主弦杆。连接板的厚度小于腹杆的厚度。由于连接板的板状的特点,在相邻层臂节之间保留了较大的空间,通过该空间安装滑块组件,使内层臂节滑动顺畅,且实现更多层的臂节套设。在增大伸缩式桁架臂的伸缩幅度的同时,保障各臂节的滑动平顺性和承载能力,提升工程机械的作业适用性,方便转场作业及狭小作业空间施工。
技术研发人员:石国善,崔丹丹,张丹
受保护的技术使用者:徐工集团工程机械股份有限公司建设机械分公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!