基于多模态感知的机械结构工作平台自动控制系统及方法与流程
本发明属于机械结构工作平台控制领域,具体涉及一种基于多模态感知的机械结构工作平台自动控制系统及方法。
背景技术:
1、在航天发射领域,运载火箭的垂直总装测试和发射状态更为接近,更有利于火箭的整体测试和箭地接口状态的保持。由于箭体高度较高,尤其是大中型火箭普遍在50米以上,其测试和操作需要在竖直方向不同高度设置多层的工作平台。平台为机械钢结构,单层平台分为左右两侧,可以为工作人员和相关的设备提供测试和操作的支撑平台。两套平台中间各留有半圆形空间,合拢后将箭体包围,平台与箭体之间约有20cm空间,实现人员对箭体的近距离操作,如图1所示。
2、单侧工作平台又由升降段、左右回转段与中间推拉段组成。平台采用液压驱动,可以完成升降、推拉及回转等动作。左右的回转段通过单根油缸驱动,推拉段由左右两根油缸同步驱动。平台升降由左、右两根油缸同步驱动,导向轮沿导轨上下运行。平台下部为承力桁架,维持整体结构稳定,上表面为操作人员工作界面,导轨与插销承受平台及人员的整体重量。
3、平台边缘与箭体距离较近,加上箭体停放位置的偏差,平台动作过程中存在着磕碰箭体的隐患。平台为钢结构材质,如果与箭体发生磕碰,在液压驱动力下很可能将对箭体造成严重损伤,影响箭体安全。同时由于平台在设计时缺少有效的电子测量感知手段,为确保安全可靠,平台的操作采用多人配合、纯手动操作的方式。每次动作往往需要5-7名人员协同配合才能完成,其中液压操作员1名、左右插销操作员2名、观察员2-4名。费时费力,且存在着因为人员观察或操作不当导致磕碰箭体的隐患。
4、因此,为解决钢结构平台自动化程度低、人工消耗大且安全风险高的问题,亟需设计一种高可靠性的工作平台自动控制系统。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种基于多模态感知的机械结构工作平台自动控制系统及方法,以解决目前火箭测试工作平台自动化程度低、人工消耗大且安全风险高等问题。
3、(二)技术方案
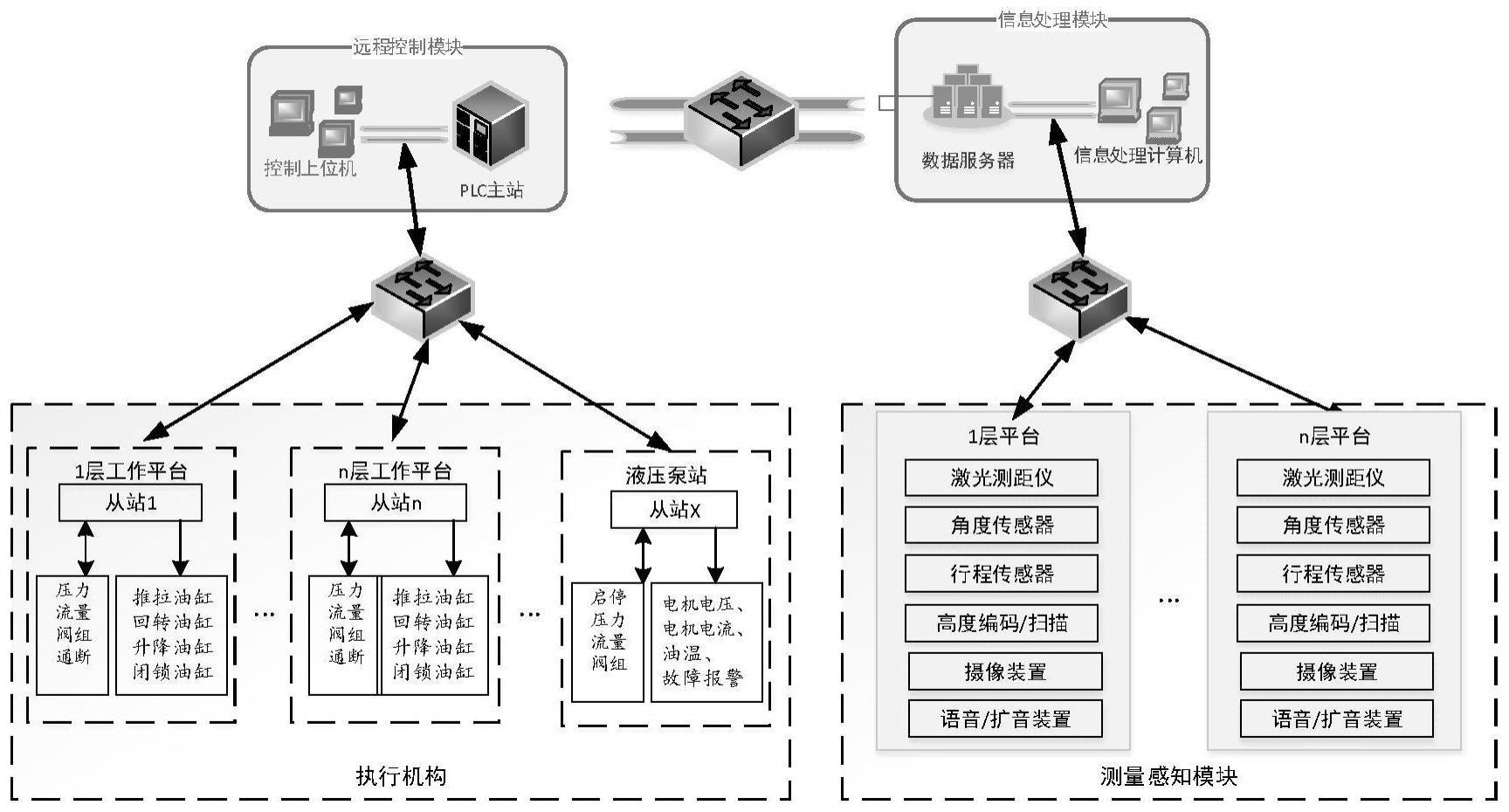
4、为了解决上述技术问题,本发明提出一种基于多模态感知的机械结构工作平台自动控制系统,其特征在于,该系统包括测量感知模块、信息处理模块、远程控制模块及自动执行模块,
5、测量感知模块由布设在工作平台各个位置的测量传感器组成,单层单侧平台包括:升降段、中间推拉段和左右回转段,每个平台的测量感知模块包括激光测距仪6个,高度编码扫码装置1台、油缸行程检测仪4个、角度传感器2个、行程限位开关4个,以及图像记录与识别装置及其附属对话设备2台;
6、在平台弧圈区域平均分布设置4个激光测距仪,其中,中间推拉段布设2个,左、右两侧回转段各1个,用于测量推拉段向前推出、回转段合拢过程中弧段位置与箭体的实时距离;在平台升降段靠近导轨部位两侧各布设1个激光测距仪,用于测量上下层平台之间的距离;
7、在平台升降导轨的内侧粘贴高度条形编码标签,在平台侧导向轮支座上安装扫码装置,实时获取平台的位置高度供控制模块决策高度是否调整到位;
8、在中间推拉段2根油缸和升降段2根油缸分别设置行程检测仪,用于测量液压油缸的伸缩距离和位移速度,以获取平台推拉、升降的运行速度和行程;
9、油缸行程检测仪采用拉线传感器,可内置于活塞杆内、也可外置于油缸缸体,平台控制系统通过行程检测仪反馈的数据实时调节各油缸进油流量,以实现油缸运行的精确调控;
10、回转段的限位开关安装于回转轴旋转0度和90度两个位置,确保在平台回转段打开与合拢到位的状态能准确触发并反馈给信息处理模块;推拉段的限位开关安装于推拉导轨的前、后限位,确保平台在推、拉到位后能准确触发并反馈给信息处理模块;
11、在当前工作平台的上一层工作平台左右两侧底部桁架上各安装1台摄像装置,用于监测当前工作平台的整体态势,包括平台上表面的人员、设备分布和平台与箭体匹配情况;摄像装置配备语音对话装置,实现平台的远程监控及和平台上方人员的远程对话功能;
12、信息处理模块包括:信息处理计算机、分析软件、数据服务器及相关的通讯设备;测量感知模块获取的各类数据采集至信息处理模块进行计算和分析,得到平台与箭体的在各个方位的距离、中间推拉段的位置、左右回转段的开合角度、整个平台的位置高度及平台表面设备人员的整体态势,并将各类距离、角度、高度等数据传输给远程控制模块用于控制策略调整;
13、远程控制模块负责整个平台的动作控制,包括:控制操作上位机、主控plc、通讯及相关io模块,用于采集工作平台液压系统的设备参数,接收信息处理模块的关键状态数据,向自动执行模块发送指令;
14、自动执行模块包括各层平台的控制从站plc、液压泵站控制从站plc、液压泵、比例溢流阀、比例流量阀、液压油缸及液压插销与液压闭锁,通过接收指令完成平台动作。
15、本发明还提供一种基于多模态感知的机械结构工作平台自动控制方法,该方法包括:
16、s1、状态准备阶段
17、s11、完成控制系统控制柜内相关模块、液压系统、平台机械结构、各类感知测量传感器状态及平台上方人员、设备情况状态的检查;
18、s12、检查无异常后,对控制柜、各类传感器、液压系统所有设备未加电设备进行上电,完成上位机的开机运行、液压泵站及相关阀控箱的开机运行;
19、s13、上位机开机后检查控制系统内各站点网络通信情况,检查液压系统相关设备及各类感知测量传感器的数据反馈是否正常;
20、s2、平台动作阶段
21、平台动作阶段完成以下工作:
22、操作人员通过摄像装置观察平台上方人员及设备状态,如果平台上仍有人员工作则通过摄像装置自带的扩音设备进行警告,劝其尽快离开平台;并开始播放“平台调整,请勿靠近”的提示语音;然后完成平台伸出动作、平台收回动作、平台合拢动作、平台展开动作及平台升降动作;
23、s3、系统撤收阶段
24、s31、在完成平台的各项调整动作之后,确保液压插销均已插好、平台处于安全状态;
25、s32、完成液压泵停机、控制系统上位机关机;
26、s33、完成除摄像装置之外的控制柜、各类传感器、液压系统的断电。
27、(三)有益效果
28、本发明提出一种基于多模态感知的机械结构工作平台自动控制系统及方法,本发明通过使用该工作平台自动控制系统,可实现钢结构工作平台的远程自动控制,减少平台动作时操作人员及观察人员的工作量,实现现场无人值守;自动控制的使用在一定程度上还提升了平台动作的安全性,减少了人员误操作的可能性。
技术特征:
1.一种基于多模态感知的机械结构工作平台自动控制系统,其特征在于,该系统包括测量感知模块、信息处理模块、远程控制模块及自动执行模块,
2.如权利要求1所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,系统根据激光测距仪所测得距离数据实时调整平台动作:
3.如权利要求1所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,条形编码标签与导轨上插销孔一一对应,其标高测量精度等于插销孔最小间距,条形编码标签上录入平台标高信息,通过扫码装置可读取,扫码装置安装于平台侧导向轮支座上,随平台同步升降,实时获取平台的位置高度供控制模块决策高度是否调整到位。
4.如权利要求1所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,油缸行程检测仪采用拉线传感器,内置于活塞杆内,或者外置于油缸缸体,系统通过行程检测仪反馈的数据实时调节各油缸进油流量,以实现油缸运行的精确调控。
5.如权利要求1所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,角度传感器采用绝对值编码器测量角度,采用增量编码器测量角速度,回转段平台动作时根据角度传感器所测得的角度数据实时调整液压系统流量,进而控制平台动作的速度,实现平台的平稳运行。
6.如权利要求1-5任一项所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,系统的液压执行机构和各类测量感知传感器布置在平台现场,液压泵设置在建筑物高层泵站间内;控制系统主站plc、信息处理计算机及控制上位机设置在集中监控室,各层平台的控制从站plc设置在各层平台上表面,液压泵站控制从站plc设置在液压泵站间中;主plc为各从站plc发送各类设备执行指令,并汇总各从站plc采集到各类数据;各控制从站plc负责接收主站plc的各类指令,负责向主站plc发送自己采集到的各类数据,负责向各自平台或泵站设备下达执行指令、采集执行情况反馈和测量感知数据,主从站plc之间通过光纤网络建立通信。
7.如权利要求6所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,测量感知模块中除摄像装置为长期加电运行状态,其余均为平台动作前上电,动作完毕后断电的状态。
8.一种基于权利要求1-7任一项所述的系统的基于多模态感知的机械结构工作平台自动控制方法,其特征在于,该方法包括:
9.如权利要求8所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,所述平台伸出动作具体包括:
10.如权利要求8所述的基于多模态感知的机械结构工作平台自动控制系统,其特征在于,所述平台升降动作具体包括:
技术总结
本发明涉及一种基于多模态感知的机械结构工作平台自动控制系统及方法,属于机械结构工作平台控制领域。本发明的系统包括测量感知模块、信息处理模块、远程控制模块及自动执行模块,通过在工作平台的特定位置设置激光测距仪、高度编码/扫码器、油缸行程检测仪、图像记录与识别装置等测量感知装置获取平台的综合态势信息;信息处理模块处理态势信息并将计算结果实时传输给远程控制模块,远程控制模块根据距离、高度等参数实时调节液压系统的启停动作与流量,驱动液压油缸等自动执行模块实现平台动作的加速、减速或启停。本发明在一定程度上还提升了平台动作的安全性,减少了人员误操作的可能性。
技术研发人员:古宇飞,钟文安,吴纯治,张博,陈少将,刘测产,张闯,王宁,张青,李朋虎
受保护的技术使用者:中国人民解放军63796部队
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!