一种可供搬运物件的自动化机器人
本发明涉及物件搬运,具体是一种可供搬运物件的自动化机器人。
背景技术:
1、搬运,是指承受负载并运送到另一个地方。通过一段较长距离将物件从一地运送到另一地。可用以人工搬运或者机器搬运。
2、阶梯式管件指的是两端内径不同或两端外径不同的管状物件,由于其形状比较特殊,在现有的搬运过程中存在以下问题,若采用人工进行搬运,一般是通过两个人抬起阶梯式管件的两端端口进行搬运,由于阶梯式管件的两端直径不同,两个人抬起的高度不同,且难以掌控,因此在搬运的过程中会使得阶梯式管件出现倾斜,使得处于阶梯式管件后侧的搬运人员承受较大的重量,过多的消耗其力量,使其无法长时间的搬运,因此人工搬运存在费时费力,运输效率低的问题,而采用起吊的方式进行搬运时,由于阶梯式管件的两端内外径不同,在吊运过程中难以保持阶梯式管件处于水平状态,容易发生倾斜,并从吊具上脱离,不仅对阶梯式管件自身造成损坏,而且还容易砸到他人,因此存在一定风险。
3、因此,急需一种可供搬运物件的自动化机器人,来实现自动搬运上述阶梯式管件,同时在搬运过程中能够保持阶梯式管件处于平稳状态,降低风险。
技术实现思路
1、本发明的目的是提供一种可供搬运物件的自动化机器人,以解决上述背景技术的问题。
2、本发明的技术方案是:一种可供搬运物件的自动化机器人,包括agv小车、提升机构、支撑块、两个内撑夹持机构;提升机构设置在agv小车的顶部,提升机构的输出端连接有安装梁,安装梁的下方设有两个夹持臂,安装梁的底部设有驱动两个夹持臂实现夹持功能的驱动组件;两个内撑夹持机构分别对称设置在两个夹持臂相对的侧壁上,所述内撑夹持机构包括支撑块、滑套、两个弧形支撑板和直线移动组件;支撑块水平固定在夹持臂的侧壁上,支撑块远离夹持臂的一端固定有安装块;滑套套设在所述支撑块上且能在支撑块上移动;两个弧形支撑板对称设置在支撑块的上下两侧,每个弧形支撑板的内壁两侧分别铰接有两个第一连杆,两个第一连杆呈x形设置,且中部通过铰接轴相互铰接,两个第一连杆远离弧形支撑板的一端分别与支撑块以及滑套铰接;直线移动组件设置在夹持臂上,其输出端与滑套的侧壁连接,用于带动滑套沿支撑块的长度方向移动。
3、优选的,所述直线移动组件包括第一电机、第一齿轮、第一丝杠、第二齿轮、第一螺母座和两个第二连杆;第一电机固定在安装腔的一侧内壁上,所述安装腔开设在夹持臂内,第一电机的输出轴水平设置,且端部与安装腔的内壁转动连接,第一齿轮套装固定在所述第一电机的输出轴上;第一丝杠水平设置在安装腔内,第一丝杠的两端分别与安装腔的两侧内壁转动连接;第二齿轮套装固定在所述第一丝杠上,且远离支撑块设置,第二齿轮与第一齿轮啮合;第一螺母座套设在所述第一丝杠上,且靠近支撑块设置;两个第二连杆水平设置在第一丝杠的上下两侧,两个第二连杆的一端与第一螺母座背对第二齿轮的侧壁固定,两个第二连杆的另一端延伸至安装腔外与所述滑套的侧壁固定。
4、优选的,所述每个弧形支撑板的外壁上均设有第一防滑橡胶垫。
5、优选的,所述驱动组件包括第二电机、双向丝杠和两个第二螺母座;第二电机固定在所述安装梁的一侧侧壁上;双向丝杠水平设置在安装槽内,所述安装槽开设于安装梁的底部,双向丝杠的一端与安装槽的内壁转动连接,双向丝杠的另一端延伸至安装槽外与所述第二电机的输出轴连接;两个第二螺母座分别套设在所述双向丝杠的两侧,两个第二螺母座的底部对应与两个夹持臂的顶部固定。
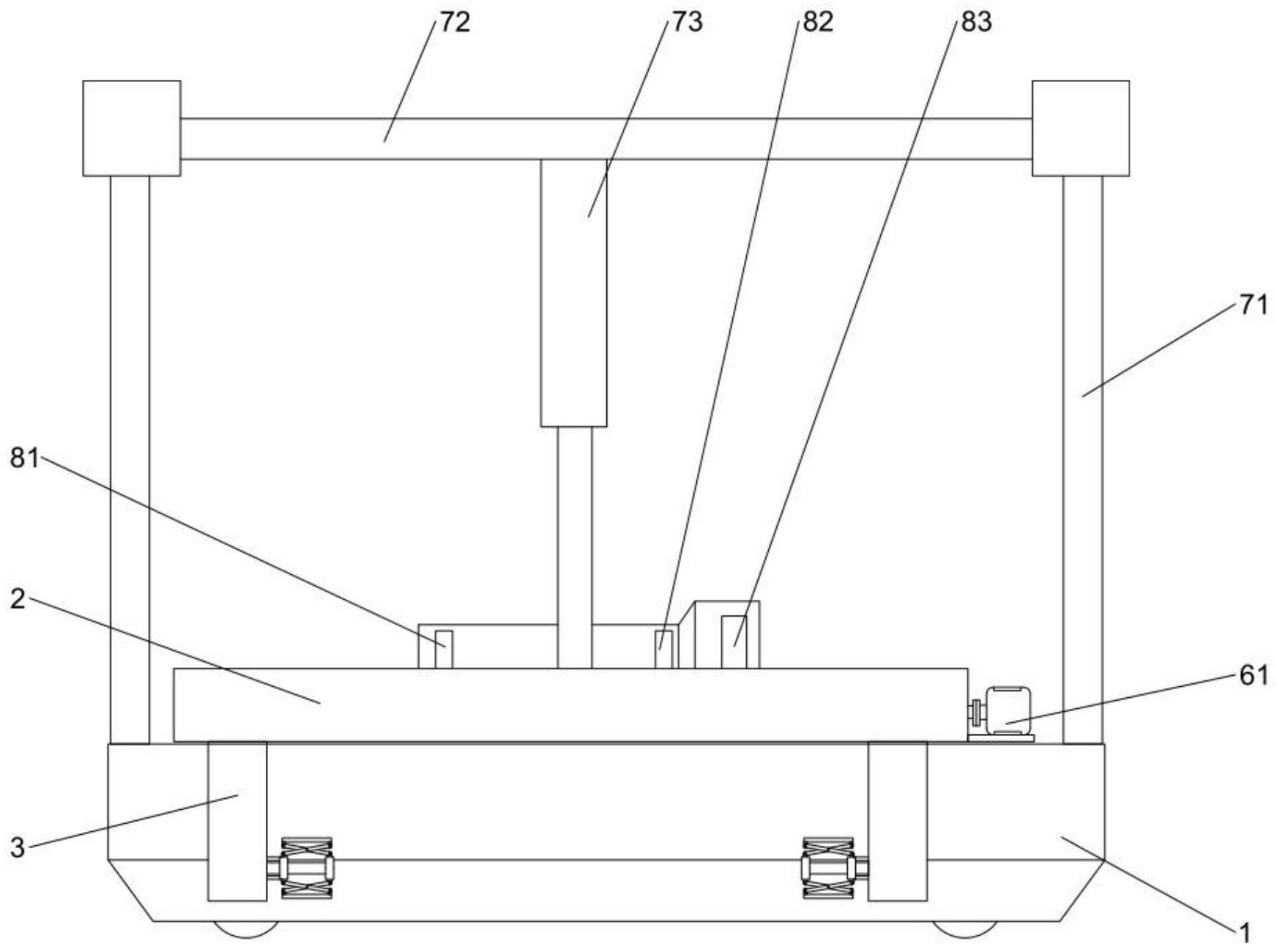
6、优选的,所述提升机构包括两个t型支撑架、安装板和液压缸;两个t型支撑架固定在所述agv小车的前后两侧,t型支撑架的两侧宽度大于agv小车的宽度;安装板设置在两个t型支撑架之间,且位于agv小车的外侧;液压缸固定在所述安装板的底部,液压缸的移动端与所述安装梁的顶部固定。
7、优选的,所述agv小车的顶部设有两组固定组件,每组固定组件包括从左至右依次设置的第一v型支撑座、第二v型支撑座和第三v型支撑座,第一v型支撑座与第二v型支撑座的开口大小相同,第三v型支撑座的开口宽度大于第一v型支撑座的开口宽度,所述两个t型支撑架相对的侧壁上沿其宽度方向开设有滑槽,所述安装板的两侧对应滑动卡装在两个滑槽内,所述滑槽内设有水平移动组件,水平移动组件的输出端与安装板连接,用于带动安装板在滑槽内移动。
8、优选的,所述水平移动组件包括第三电机、第二丝杠和导向柱;第三电机固定在其中一个滑槽内;第二丝杠的一端与所述第三电机的输出轴连接,第二丝杠的另一端与滑槽的内壁转动连接,所述安装板的一侧侧壁套设在第二丝杠上,且与第二丝杠螺纹连接;导向柱设置另外一个滑槽内,且与第二丝杠平行设置,导向柱的两端与滑槽的内壁固定,所述安装板的另一侧侧壁滑动套设在导向柱上。
9、优选的,所述第一v型支撑座、第二v型支撑座和第三v型支撑座的开口内壁上均设有第二防滑橡胶垫。
10、与现有技术相比,本发明的有益效果是:
11、1、本发明能够针对两端内径不同的阶梯式管件进行自动搬运,并且通过两个内撑夹持机构能够实现对阶梯式管件的两端内壁进行夹持固定的作用,使得阶梯式管件在通过提升机构升起以及通过agv小车运输的过程中能够保持整体处于水平状态,避免阶梯式管件出现倾斜,进而能够保证阶梯式管件在搬运过程中处于平稳状态。
12、2、本发明中的两个内撑夹持机构能够实现自动定心夹持的功能,因此在夹持阶梯式管件时无需对准阶梯式管件的中心,就能快速自动的将阶梯式管件的两端夹住,使其保持水平状态。
13、3、本发明通过设置两组固定组件能够增加一次搬运阶梯式管件的数量,进而提高了搬运效率。
技术特征:
1.一种可供搬运物件的自动化机器人,包括agv小车(1),其特征在于,还包括:
2.根据权利要求1所述的一种可供搬运物件的自动化机器人,其特征在于,所述直线移动组件包括:
3.根据权利要求2所述的一种可供搬运物件的自动化机器人,其特征在于,所述每个弧形支撑板(44)的外壁上均设有第一防滑橡胶垫(47)。
4.根据权利要求1所述的一种可供搬运物件的自动化机器人,其特征在于,所述驱动组件包括:
5.根据权利要求1所述的一种可供搬运物件的自动化机器人,其特征在于,所述提升机构包括:
6.根据权利要求5所述的一种可供搬运物件的自动化机器人,其特征在于,所述agv小车(1)的顶部设有两组固定组件,每组固定组件包括从左至右依次设置的第一v型支撑座(81)、第二v型支撑座(82)和第三v型支撑座(83),第一v型支撑座(81)与第二v型支撑座(82)的开口大小相同,第三v型支撑座(83)的开口宽度大于第一v型支撑座(81)的开口宽度,所述两个t型支撑架(71)相对的侧壁上沿其宽度方向开设有滑槽(74),所述安装板(72)的两侧对应滑动卡装在两个滑槽(74)内,所述滑槽(74)内设有水平移动组件,水平移动组件的输出端与安装板(72)连接,用于带动安装板(72)在滑槽(74)内移动。
7.根据权利要求6所述的一种可供搬运物件的自动化机器人,其特征在于,所述水平移动组件包括:
8.根据权利要求6所述的一种可供搬运物件的自动化机器人,其特征在于,所述第一v型支撑座(81)、第二v型支撑座(82)和第三v型支撑座(83)的开口内壁上均设有第二防滑橡胶垫。
技术总结
本发明公开了一种可供搬运物件的自动化机器人,包括AGV小车、提升机构、支撑块、两个内撑夹持机构;提升机构设置在AGV小车的顶部,提升机构的输出端连接有安装梁,安装梁的下方设有两个夹持臂,安装梁的底部设有驱动两个夹持臂实现夹持功能的驱动组件;两个内撑夹持机构分别对称设置在两个夹持臂相对的侧壁上,内撑夹持机构包括支撑块、滑套、两个弧形支撑板和直线移动组件;本发明能够针对两端内径不同的阶梯式管件进行自动搬运,并且通过两个内撑夹持机构能够实现对阶梯式管件的两端内壁进行夹持固定的作用,使得阶梯式管件在通过提升机构升起以及通过AGV小车运输的过程中能够保持整体处于水平状态,避免阶梯式管件出现倾斜。
技术研发人员:崔书华,平燕娜,刘新玉
受保护的技术使用者:开封技师学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!