一种单动力亚麻物料抓取及旋转机构的工作方法与流程
本发明涉及一种工作方法,尤其是涉及一种单动力亚麻物料抓取及旋转机构的工作方法,它属于用于亚麻粗纱、细纱及筒纱等物料的抓取、传递输送领域。
背景技术:
1、现有的亚麻粗纱、细纱及筒纱等物料的抓取、传递输送,通过人工操作,进行抓取,劳动强度大,费时费力,工作效率低,不能满足现有的需求。
2、还有一些抓取机构,结构相对复杂,增加了企业的成本,且设备占空间,无法满足企业的空间需求。
技术实现思路
1、本发明的目的在于克服现有技术中存在的上述不足,而提供一种安全可靠,操作方便,工作效率高,可广泛适用于亚麻粗纱、细纱及筒纱等物料的抓取、传递输送的单动力亚麻物料抓取及旋转机构。
2、本发明解决上述问题所采用的技术方案是:该单动力亚麻物料抓取及旋转机构的工作方法,包括抓取及旋转机构,所述抓取及旋转机构包括壳体、伸缩驱动总成、推杆、旋转机构、张紧盘和多个抓手,所述伸缩驱动总成、旋转机构均设置在壳体上,推杆的一端与伸缩驱动总成相连,该推杆的另一端穿过旋转机构与张紧盘连接,张紧盘上设置有多个抓手,其特征在于:具体步骤如下:伸缩驱动总成动作,带动推杆工作,推杆推动张紧盘往复运动控制抓手的开合;推杆在推进到一定程度后,推杆上的推杆凸球进入旋转机构螺旋凹槽内,再带动整个旋转机构和抓手进行旋转。
3、作为优选,本发明还包括多个螺丝螺母体,所述旋转机构上均布设置多个螺丝螺母体。
4、作为优选,本发明所述推杆凸球和螺旋凹槽均为三个。
5、作为优选,本发明所述伸缩驱动总成采用单一的动力源,选择电动或者气缸。
6、本发明与现有技术相比,具有以下优点和效果:该单动力亚麻物料抓取及旋转机构的工作方法,操作方便,工作效率高;整体结构简单,机构动力单一,可广泛适用于亚麻粗纱、细纱及筒纱等物料的抓取、传递输送等功能。
技术特征:
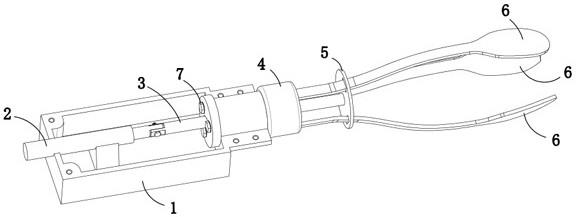
1.一种单动力亚麻物料抓取及旋转机构的工作方法,包括抓取及旋转机构,所述抓取及旋转机构包括壳体(1)、伸缩驱动总成(2)、推杆(3)、旋转机构(4)、张紧盘(5)和多个抓手(6),所述伸缩驱动总成(2)、旋转机构(4)均设置在壳体(1)上,推杆(3)的一端与伸缩驱动总成(2)相连,该推杆(3)的另一端穿过旋转机构(4)与张紧盘(5)连接,张紧盘(5)上设置有多个抓手(6),其特征在于:具体步骤如下:伸缩驱动总成(2)动作,带动推杆工作,推杆推动张紧盘往复运动控制抓手(6)的开合;推杆在推进到一定程度后,推杆(3)上的推杆凸球(31)进入旋转机构(4)螺旋凹槽(41)内,再带动整个旋转机构(4)和抓手(6)进行旋转。
2.根据权利要求1所述的单动力亚麻物料抓取及旋转机构的工作方法,其特征在于:还包括多个螺丝螺母体(7),所述旋转机构(4)上均布设置多个螺丝螺母体(7)。
3.根据权利要求1所述的单动力亚麻物料抓取及旋转机构的工作方法,其特征在于:所述推杆凸球(31)和螺旋凹槽(41)均为三个。
4.根据权利要求1所述的单动力亚麻物料抓取及旋转机构的工作方法,其特征在于:所述伸缩驱动总成(2)采用单一的动力源,选择电动或者气缸。
技术总结
本发明涉及一种单动力亚麻物料抓取及旋转机构的工作方法,它属于用于亚麻粗纱、细纱及筒纱等物料的抓取、传递输送领域。本发明的抓取及旋转机构包括壳体、伸缩驱动总成、推杆、旋转机构、张紧盘和多个抓手,伸缩驱动总成、旋转机构均设置在壳体上,推杆的一端与伸缩驱动总成相连,推杆的另一端穿过旋转机构与张紧盘连接,张紧盘上设置有多个抓手,伸缩驱动总成动作,带动推杆工作,推杆推动张紧盘往复运动控制抓手的开合;推杆在推进到一定程度后,推杆上的推杆凸球进入旋转机构螺旋凹槽内,再带动整个旋转机构和抓手进行旋转。本发明安全可靠,操作方便,工作效率高,满足使用需求。
技术研发人员:姜伟
受保护的技术使用者:黑龙江金达麻业有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!