一种电池片存储系统及其存储方法与流程
本发明涉及电池片存储,尤其涉及一种电池片存储系统及其存储方法。
背景技术:
1、在光伏行业中,太阳能电池片经过多道工序加工完成后,需要进行测试分选,分选完的电池片会根据颜色、效率、档位等指标进行分类装箱,大量装箱后的电池片需要进行分类缓存,等待发货到下游厂家。现有技术中的处理方式一般是人工将装箱后的电池片进行堆放,或直接放在地面,或放在简单的货架上。由于车间每天生产的电池片数量巨大,工人的劳动强度非常大,同时需要非常大的地方来存放这些装箱的电池片,而现实情况是电池片生产车间的空间往往很有限,按常规的方式很难存储下巨量的电池片。也有的车间用机器人进行取放料,但其机器人是固定在地面不动的,只能在机器人本身的可达范围内进行货物的存储,货物的存储数量仍然受到了很大的限制。
技术实现思路
1、本发明要解决的技术问题是克服现有技术的不足,提供一种节约空间,提高存储量的电池片存储系统及其存储方法。
2、为解决上述技术问题,本发明采用以下技术方案:
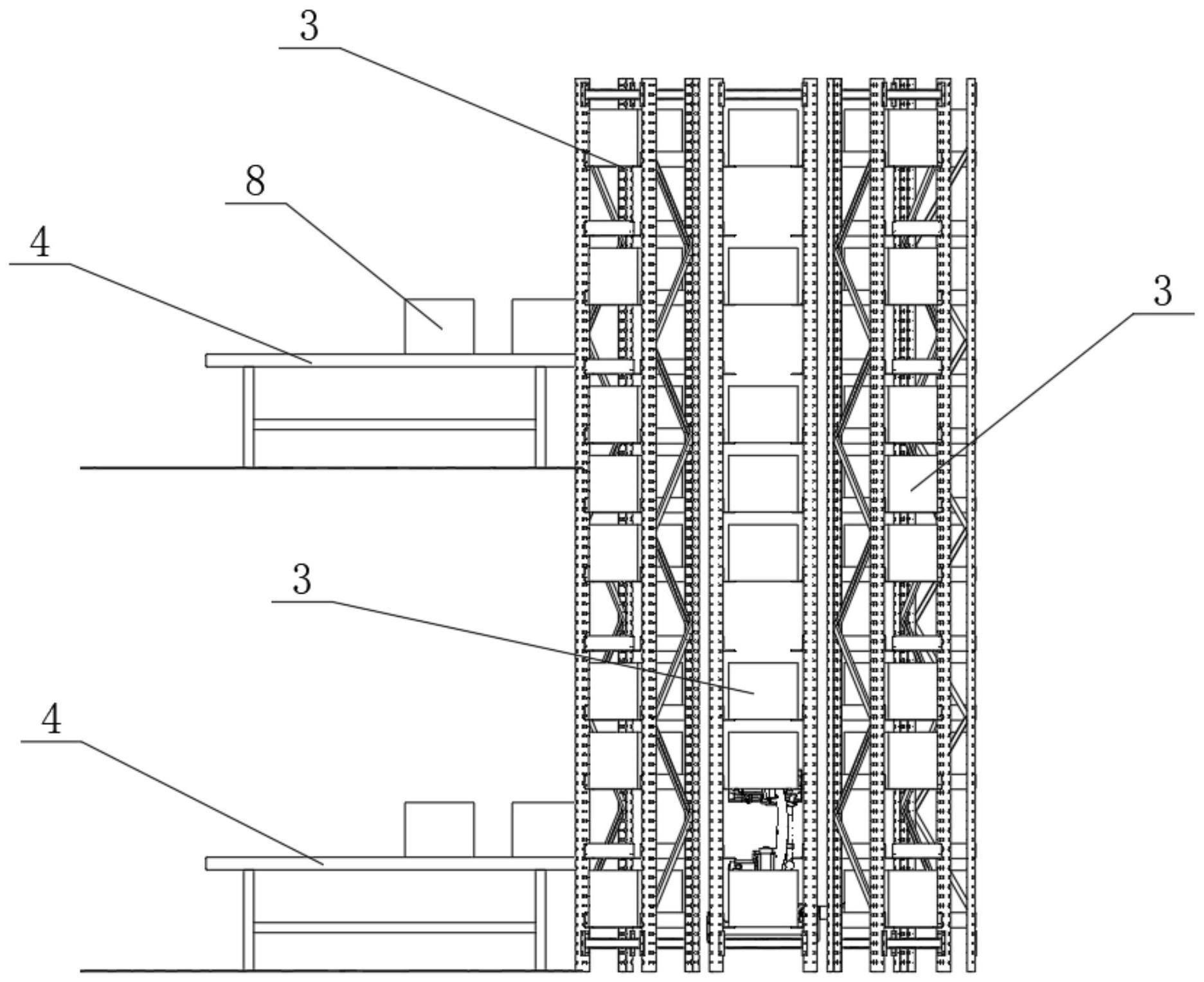
3、一种电池片存储系统,包括底座、用于取放货箱的机器人、多个货架及多个货箱输送装置,多个所述货架以机器人为圆心,沿机器人圆周方向间隔布置,多个货箱输送装置沿货架高度方向间隔布置,所述机器人设于底座上,所述底座上设有用于驱动机器人在货架上升降的升降驱动装置,所述机器人上设有夹爪及用于调整夹爪间距的调整装置。
4、作为上述技术方案的进一步改进:
5、所述升降驱动装置包括转轴用于驱动转轴旋转的第一驱动电机,所述第一驱动电机设于底座上,所述转轴可转动地设于底座上,所述转轴上设有传动齿轮,所述货架上设有传动齿条,所述传动齿条竖直布置,所述传动齿轮与传动齿条啮合连接。
6、所述底座上设有轴承座,所述转轴穿设于轴承座上。
7、所述货架上设有第一导轨,所述底座两端设有第一滑块,两块所述第一滑块分别滑设于相对布置的货架的第一导轨上。
8、所述第一驱动电机与减速器连接,所述减速器的两个输出端分别通过联轴器与一根转轴连接,所述减速器设于底座上。
9、所述夹爪包括安装板及两个货叉,两个所述货叉可相对靠近或远离地设于安装板上,所述调整装置包括同步带机构及用于驱动同步带机构运转的第二驱动电机,所述同步带机构及第二驱动电机均设于安装板上,两个所述货叉分别与同步带机构中同步轮不同侧的同步带连接。
10、所述安装板上设有第二导轨,所述货叉上设有第二滑块,第二滑块滑设于第二导轨上。
11、所述货箱输送装置包括入库输送机及出库输送机,所述入库输送机与出库输送机并排布置。
12、所述机器人为六轴机器人。
13、一种上述的电池片存储系统的存储方法,包括以下步骤:
14、s1、将装满电池片的货箱通过与存储高度对应的货箱输送装置输送至靠近货架;
15、s2、升降驱动装置驱动机器人运动至货架对应的存储高度处;
16、s3、调整装置根据货箱的大小,调整夹爪间距;
17、s4、机器人通过夹爪叉取货箱输送装置上的货箱,并将货箱放至货架上对应的存储位置。
18、与现有技术相比,本发明的有益效果在于:本发明公开的电池片存储系统,多个货架以机器人为圆心,沿机器人圆周方向间隔布置,即环绕在机器人外,一方面货架排放更加紧凑,另一方面机器人只需旋转即可实现在各货架中取放货箱;每层楼均配设货箱输送装置,货箱输送装置与货架一起环绕在机器人外,便于机器人在货箱输送装置上取放货箱,当货箱需存储在第二层楼高的位置时,将货箱放置在第二层楼的货箱输送装置上,升降驱动装置驱动底座及机器人上升至第二层楼高的位置,再从货箱输送装置中取货箱送至货架中对应存储位置即可,通过增加货架高度配合机器人升降,可以实现不同楼层货箱的取放,在不增加占地面积的同时,提高了存储系统的存储量;且通过调整装置调整夹爪间距,便于机器人取放不同尺寸大小的货箱,适应性强。
技术特征:
1.一种电池片存储系统,其特征在于:包括底座(1)、用于取放货箱(8)的机器人(2)、多个货架(3)及多个货箱输送装置(4),多个所述货架(3)以机器人(2)为圆心,沿机器人(2)圆周方向间隔布置,多个所述货箱输送装置(4)沿货架(3)高度方向间隔布置,所述机器人(2)设于底座(1)上,所述底座(1)上设有用于驱动机器人(2)在货架(3)上升降的升降驱动装置(5),所述机器人(2)上设有夹爪(6)及用于调整夹爪(6)间距的调整装置(7)。
2.根据权利要求1所述的电池片存储系统,其特征在于:所述升降驱动装置(5)包括转轴(51)用于驱动转轴(51)旋转的第一驱动电机(52),所述第一驱动电机(52)设于底座(1)上,所述转轴(51)可转动地设于底座(1)上,所述转轴(51)上设有传动齿轮(511),所述货架(3)上设有传动齿条(21),所述传动齿条(21)竖直布置,所述传动齿轮(511)与传动齿条(21)啮合连接。
3.根据权利要求2所述的电池片存储系统,其特征在于:所述底座(1)上设有轴承座(11),所述转轴(51)穿设于轴承座(11)上。
4.根据权利要求2所述的电池片存储系统,其特征在于:所述货架(3)上设有第一导轨(22),所述底座(1)两端设有第一滑块(12),两块所述第一滑块(12)分别滑设于相对布置的货架(3)的第一导轨(22)上。
5.根据权利要求2所述的电池片存储系统,其特征在于:所述第一驱动电机(52)与减速器(53)连接,所述减速器(53)的两个输出端分别通过联轴器(54)与一根转轴(51)连接,所述减速器(53)设于底座(1)上。
6.根据权利要求1至5中任一项所述的电池片存储系统,其特征在于:所述夹爪(6)包括安装板(61)及两个货叉(62),两个所述货叉(62)可相对靠近或远离地设于安装板(61)上,所述调整装置(7)包括同步带机构(71)及用于驱动同步带机构(71)运转的第二驱动电机(72),所述同步带机构(71)及第二驱动电机(72)均设于安装板(61)上,两个所述货叉(62)分别与同步带机构(71)中同步轮不同侧的同步带连接。
7.根据权利要求6所述的电池片存储系统,其特征在于:所述安装板(61)上设有第二导轨(611),所述货叉(62)上设有第二滑块(621),第二滑块(621)滑设于第二导轨(611)上。
8.根据权利要求1至5中任一项所述的电池片存储系统,其特征在于:所述货箱输送装置(4)包括入库输送机(41)及出库输送机(42),所述入库输送机(41)与出库输送机(42)并排布置。
9.根据权利要求1至5中任一项所述的电池片存储系统,其特征在于:所述机器人(2)为六轴机器人。
10.一种权利要求1至9中任一项所述的电池片存储系统的存储方法,其特征在于:包括以下步骤:
技术总结
本发明公开了一种电池片存储系统,包括底座、用于取放货箱的机器人、多个货架及多个货箱输送装置,多个所述货架以机器人为圆心,沿机器人圆周方向间隔布置,多个货箱输送装置沿货架高度方向间隔布置,所述机器人设于底座上,所述底座上设有用于驱动机器人在货架上升降的升降驱动装置,所述机器人上设有夹爪及用于调整夹爪间距的调整装置。本发明还公开了其存储方法。本发明具有节约空间,提高存储量的优点。
技术研发人员:张宇,丁杏,梁毅,谢振勇
受保护的技术使用者:湖南红太阳光电科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!