本发明涉及起重机械。更具体地说,本发明涉及一种规避波浪共振区的浮式起重机控制系统及控制方法。
背景技术:
1、随着科技的发展,人类工程施工逐步走向海洋,与在陆地施工相比其难度大量增大。当船舶在海洋中处于无风浪环境中时,传统浮式起重机可以完成正常的作业任务,但当船舶处于风浪环境中时,由于海浪对船舶产生的激励使船舶姿态发生变化,浮式起重机的吊物容易产生摆动,这大大增加了浮式起重机的作业难度,同时也增加了发生安全事故的风险。如何避免浮式起重机吊物在波浪激励下产生摆动,是现代海洋工程施工装备亟需攻克的难题。
2、传统抑制浮式起重机吊物摆动的途径主要有两种,第一种是机械式抑摆,主要通过在起重机外部增加机械结构来抑制摆动,这种方式需要对原有的起重机结构进行改装,导致其结构复杂,维护难度增加,且会对起重机的作业范围产生一定影响;第二种是电子式抑摆,通过通过控制起重机的回转、起升和变幅来达到抑制吊物摆动的目的,该方法在抑制吊物摆动期间起重机无法进行正常施工作业,降低了工作效率,增加了时间成本。
3、为解决上述问题,需要设计一种规避波浪共振区的浮式起重机控制系统及控制方法,在保证施工安全和施工效率的同时有效抑制起重机吊物摆动。
技术实现思路
1、本发明的目的是提供一种规避波浪共振区的浮式起重机控制系统及控制方法,通过船舶姿态测量装置实现对实时波浪激励的驱动周期的测量,配合起重机幅角测量装置、钢丝绳绳长测量装置、控制单元和执行单元协同控制钢丝绳绳长和吊臂幅角使吊物在起重机正常作业期间避开当前波浪共振区,有效抑制了吊物在空间中的摆动,在保证施工安全的基础上提高了起重施工效率。
2、为了实现根据本发明的这些目的和其它优点,提供了一种规避波浪共振区的浮式起重机控制系统,包括:
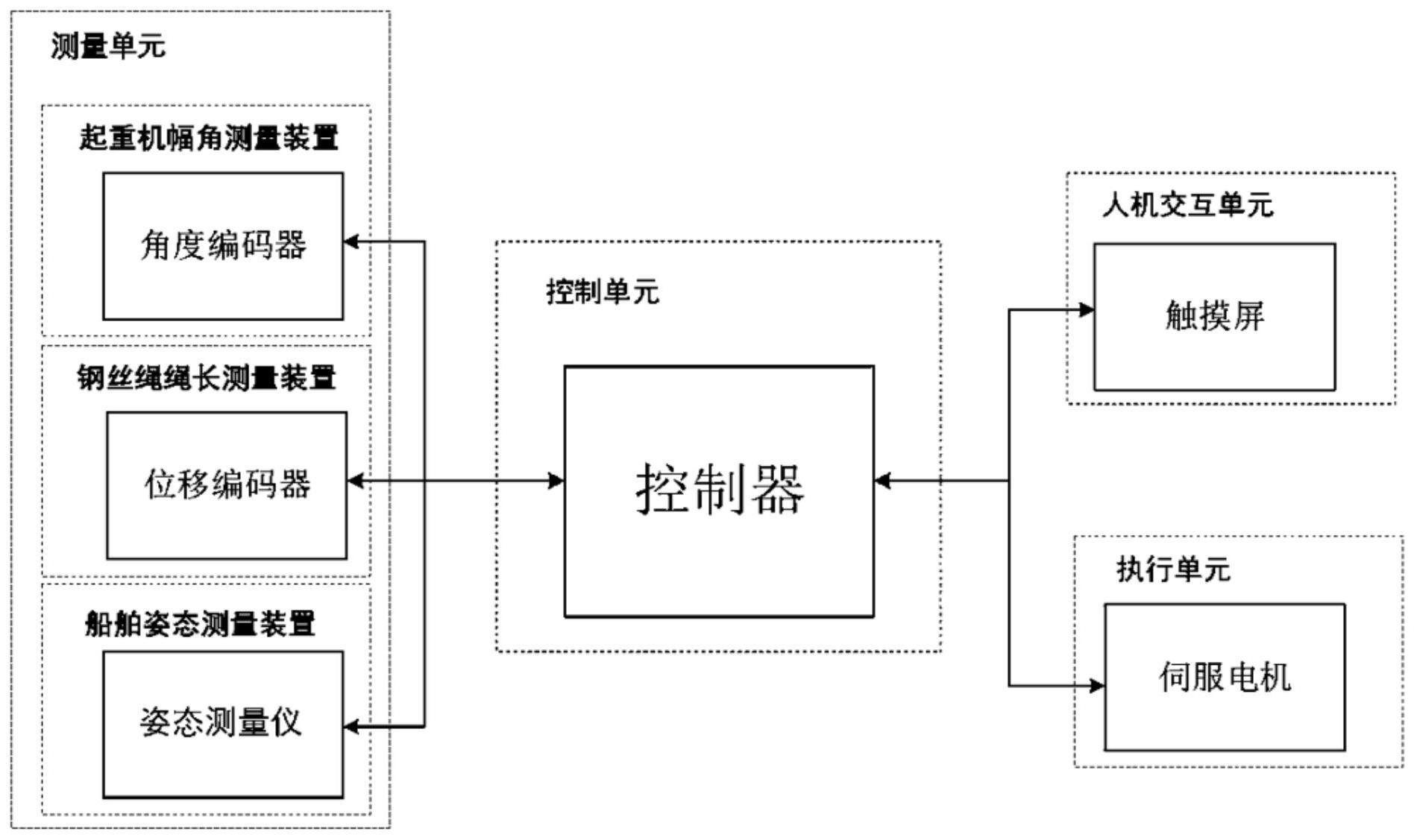
3、测量单元,其包括船舶姿态测量装置,其设置为用于测量搭载起重机的船体的运动轨迹数据;起重机幅角测量装置,其设置为用于测量起重机吊臂的变幅角度数据;钢丝绳绳长测量装置,其设置为用于测量吊装钢丝绳的绳长数据;
4、执行单元,其包括两组伺服电机,其分别设置为用于调节起重机吊臂的变幅角度和吊装钢丝绳的出线长度;
5、控制单元,其包括控制器,其分别与所述测量单元和所述执行单元电连接;
6、其中,所述控制器接收所述测量单元传输的运动轨迹数据、变幅角度数据和绳长数据,并根据分析得到的船舶姿态变换周期是否落在抑摆控制范围的判断结果向所述执行单元发送相应的控制指令。
7、优选的是,所述规避波浪共振区的浮式起重机控制系统,还包括人机交互单元,其包括:
8、显示器,其与所述控制器电连接并用于显示所述测量单元的检测数据、所述控制单元的计算数据和所述执行单元的各控制参数;输入面板,其分别与所述显示器、所述控制器电连接并用于调节所述执行单元的各控制参数。
9、优选的是,所述规避波浪共振区的浮式起重机控制系统,所述船舶姿态测量装置包括姿态测量仪,其设置在船体上,所述姿态测量仪测量的数据包括船体的横摇角度和纵摇角度。
10、优选的是,所述规避波浪共振区的浮式起重机控制系统,所述起重机幅角测量装置包括角度编码器,其设置在起重机的吊臂臂尾处的电机转轴上,所述角度编码器测量的数据包括吊臂与水平面的相对变幅角度。
11、优选的是,所述规避波浪共振区的浮式起重机控制系统,所述钢丝绳绳长测量装置包括位移编码器,其设置在起重机卷筒的转轴上,所述位移编码器测量的数据包括吊装钢丝绳的出绳长度。
12、优选的是,所述规避波浪共振区的浮式起重机控制系统,所述控制器包括数据采集模块,其设置为用于接收来自所述测量单元的运动轨迹数据、变幅角度数据和绳长数据;计算模块,其设置为用于根据所述运动轨迹数据分析船舶姿态变换周期,并根据所述变幅角度数据和所述绳长数据计算抑摆控制范围;比较模块,其设置为用于对比所述船舶姿态变换周期和所述抑摆控制范围,并输出船舶姿态变换周期是否落在抑摆控制范围的判断结果;控制模块,其设置为用于接收所述比较模块的判断结果并以此为依据向所述执行单元发送控制指令。
13、本发明还提供了一种规避波浪共振区的浮式起重机控制方法,包括:
14、s1、测量单元实时采集船体的运动轨迹数据、起重机吊臂的变幅角度数据和吊装钢丝绳的绳长数据并将其传输至控制单元;
15、s2、控制单元根据船体在设定时间内的运动轨迹数据预测当前时刻的船舶姿态变换周期,并根据实时绳长数据计算当前时刻的吊物共振周期;
16、s3、根据吊物共振周期和实际作业情况共同设定抑摆控制范围;
17、s4、控制单元将预测到的船舶姿态变换周期与设定的抑摆控制范围进行对比,当船舶姿态变换周期落在抑摆控制范围内时,判断此时吊物不处于共振区,继续作业;当船舶姿态变换周期落在抑摆控制范围外时,判断此时吊物处于共振区,控制单元向执行单元发送控制指令调节起重机吊臂的变幅角度和吊装钢丝绳的出线长度,使吊物离开共振区并继续作业;
18、s5、随作业时间重复s1-s4的步骤直至本次作业结束,即停止控制。
19、优选的是,所述规避波浪共振区的浮式起重机控制方法,s3中,所述抑摆控制范围的设定方法为:
20、当起重机处于回转工作阶段时,抑摆控制范围为:tt>1.2ta;
21、当起重机处于起升或下落工作阶段时,抑摆控制范围为:在tr≤3tt内满足tt>1.2ta;
22、其中,tt为当前时刻的船舶姿态变换周期;
23、ta为当前时刻的吊物共振周期,s为当前时刻的吊装钢丝绳的绳长,g为重力加速度;
24、tr为从当前时刻开始的作业时长。
25、本发明至少包括以下有益效果:
26、本发明采用规避波浪共振区的浮式起重机的控制系统和控制方法,通过船舶姿态测量装置实现对实时波浪激励的驱动周期的测量,配合起重机幅角测量装置、钢丝绳绳长测量装置、控制单元和执行单元协同控制钢丝绳绳长和吊臂幅角使吊物在起重机正常作业期间避开当前波浪共振区,有效抑制了吊物在空间中的摆动;本发明的控制系统结构简单,控制方法清楚、明确,既不需要需要改变浮式起重机的机械结构,也不必在维持抑摆效果的同时暂停起重机的正常施工作业,在保证施工安全的基础上提高了起重施工效率,能够广泛适用于各种恶劣环境条件下的浮式起重机,具有良好的应用前景。
27、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:1.一种规避波浪共振区的浮式起重机控制系统,其特征在于,包括:
2.如权利要求1所述的规避波浪共振区的浮式起重机控制系统,其特征在于,还包括人机交互单元,其包括:
3.如权利要求1所述的规避波浪共振区的浮式起重机控制系统,其特征在于,所述船舶姿态测量装置包括姿态测量仪,其设置在船体上,所述姿态测量仪测量的数据包括船体的横摇角度和纵摇角度。
4.如权利要求1所述的规避波浪共振区的浮式起重机控制系统,其特征在于,所述起重机幅角测量装置包括角度编码器,其设置在起重机的吊臂臂尾处的电机转轴上,所述角度编码器测量的数据包括吊臂与水平面的相对变幅角度。
5.如权利要求1所述的规避波浪共振区的浮式起重机控制系统,其特征在于,所述钢丝绳绳长测量装置包括位移编码器,其设置在起重机卷筒的转轴上,所述位移编码器测量的数据包括吊装钢丝绳的出绳长度。
6.如权利要求1所述的规避波浪共振区的浮式起重机控制系统,其特征在于,所述控制器包括数据采集模块,其设置为用于接收来自所述测量单元的运动轨迹数据、变幅角度数据和绳长数据;计算模块,其设置为用于根据所述运动轨迹数据分析船舶姿态变换周期,并根据所述变幅角度数据和所述绳长数据计算抑摆控制范围;比较模块,其设置为用于对比所述船舶姿态变换周期和所述抑摆控制范围,并输出船舶姿态变换周期是否落在抑摆控制范围的判断结果;控制模块,其设置为用于接收所述比较模块的判断结果并以此为依据向所述执行单元发送控制指令。
7.一种规避波浪共振区的浮式起重机控制方法,其特征在于,包括:
8.如权利要求7所述的规避波浪共振区的浮式起重机控制方法,其特征在于,s3中,所述抑摆控制范围的设定方法为:
技术总结本发明公开了一种规避波浪共振区的浮式起重机控制系统及控制方法,包括:测量单元,其包括船舶姿态测量装置,用于测量船体的运动轨迹数据;起重机幅角测量装置,用于测量起重机吊臂的变幅角度数据;钢丝绳绳长测量装置,用于测量吊装钢丝绳的绳长数据;执行单元,用于调节起重机吊臂的变幅角度和吊装钢丝绳的出线长度;控制单元,其包括控制器,分别与测量单元和执行单元电连接。本发明通过测量单元的各装置实现对波浪激励的驱动周期、吊物共振周期的测量,配合控制单元和执行单元协同控制钢丝绳绳长和吊臂幅角使吊物在起重机正常作业期间避开当前波浪共振区,有效抑制了吊物在空间中的摆动,在保证施工安全的基础上提高了吊装施工效率。
技术研发人员:张永涛,杨秀礼,程茂林,程雪聪,张益鹏,肖浩,夏昊,吴中正,华晓涛,刘修成,朱明清,张晓平,董奇峰,纪晓宇,涂同珩,黄剑,李涛,吴雪峰,李冬冬,潘道辉,范晨阳,李响
受保护的技术使用者:中交第二航务工程局有限公司
技术研发日:技术公布日:2024/1/11