一种走带纠偏方法、装置、设备及计算机可读存储介质与流程
本发明涉及工业设备领域,特别涉及一种走带纠偏方法、装置、设备及计算机可读存储介质。
背景技术:
1、随着新能源技术的发展,电池制造行业也在逐渐兴起,卷绕电池是以卷绕方式组合成形的电芯所组成的电池,具有高低温性能优异、充电快、使用寿命长、输出电压稳定,结构坚固、抗冲击能力和具有超高倍率放电能力等优点。卷绕是制造卷绕电池的过程中的一个关键过程,它将正负极片和隔膜组装在一起,这一过程需要控制卷绕机走带平稳运行,防止卷绕的过程中出现失误。但在实际生产过程中,由于设备存在的机械振动、轴承磨损等问题,造成电池卷绕的过程中出现走带跑偏的现象,所以需要对卷绕机的走带进行纠偏。
2、目前,对走带的纠偏方法一般是在复合走带区域通过传感器读取极片的位置数据计算反馈值,在空白隔膜区域通过另一传感器读取的隔膜的位置数据计算反馈值,然后通过反馈值来控制走带进行纠偏,但是这种方法在使用的过程中,在从复合走带区域切换到空白隔膜区域或从空白隔膜区域切换到复合走带区域的过程中,由于复合过程并不完全精确,极片在隔膜上可能并不完美居中,传感器的切换可能会导致计算的反馈值发生突变,而产生的纠偏器摆动幅度过大,纠偏效果不理想的问题。
技术实现思路
1、本发明的目的在于提供一种走带纠偏方法、装置、设备及计算机可读存储介质,应用于工业设备领域。该方法通过
2、为实现上述目的,本发明提供了一种走带纠偏方法,包括:
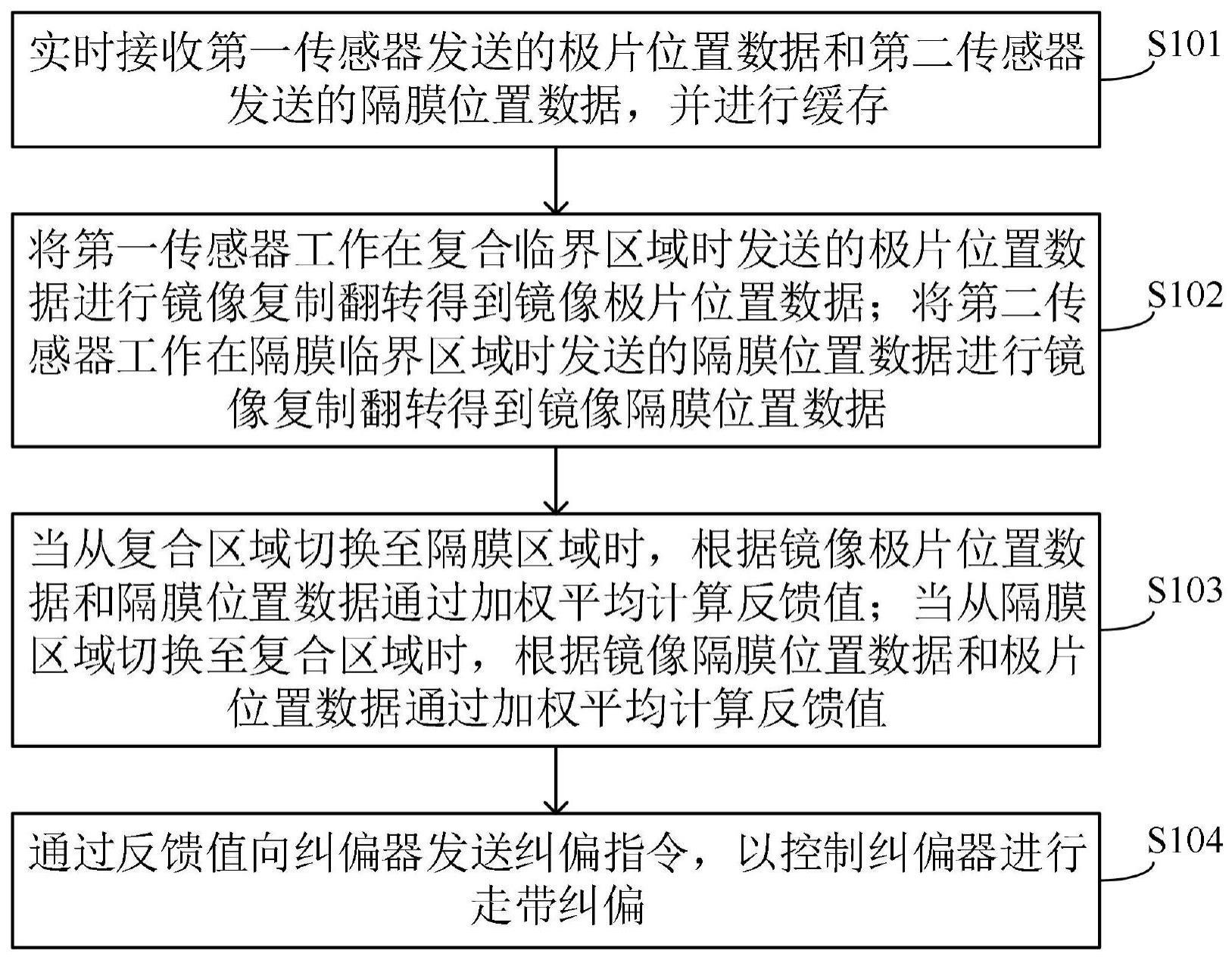
3、实时接收第一传感器发送的极片位置数据和第二传感器发送的隔膜位置数据,并进行缓存;
4、将所述第一传感器工作在复合临界区域时发送的所述极片位置数据进行镜像复制翻转得到镜像极片位置数据;将所述第二传感器工作在隔膜临界区域时发送的所述隔膜位置数据进行镜像复制翻转得到镜像隔膜位置数据;
5、当从复合区域切换至隔膜区域时,根据所述镜像极片位置数据和所述隔膜位置数据通过加权平均计算所述反馈值;当从隔膜区域切换至复合区域时,根据所述镜像隔膜位置数据和所述极片位置数据通过加权平均计算所述反馈值;
6、通过所述反馈值向纠偏器发送纠偏指令,以控制所述纠偏器进行走带纠偏。
7、可选的,所述根据所述镜像极片位置数据和所述隔膜位置数据通过加权平均计算所述反馈值,包括:
8、根据所述镜像极片位置数据和所述隔膜位置数据分别计算第一反馈值和第二反馈值;
9、将所述第一反馈值和所述第二反馈值输入第一模型通过加权平均计算所述反馈值;其中所述第一模型的数学表达式为:
10、q=a*x+(1-a)*y
11、式中,q为所述反馈值,x为所述第一反馈值,y为所述第二反馈值,a为在预设时间内由1平滑衰减到0的数。
12、可选的,所述根据所述镜像隔膜位置数据和极片位置数据通过加权平均计算所述反馈值,包括:
13、根据所述镜像隔膜位置数据和所述极片位置数据分别计算第三反馈值和第四反馈值;
14、将所述第三反馈值和所述第四反馈值输入第二模型通过加权平均计算所述反馈值;其中所述第二模型的数学表达式为:
15、q=b*m+(1-b)*n
16、式中,q为所述反馈值,m为所述第三反馈值,n为所述第四反馈值,b为在预设时间内由1平滑衰减到0的数。
17、可选的,还包括:
18、根据光照传感器发送的光照数据向光源装置发送调整指令,以调整所述光源装置的光照强度。
19、可选的,还包括:
20、当接收到所述第一传感器或所述第二传感器工作异常的指令时,发出告警。
21、为实现上述目的,本发明还提供一种走带纠偏装置,包括:
22、接收模块,用于实时接收第一传感器发送的极片位置数据和第二传感器发送的隔膜位置数据,并进行缓存;
23、镜像模块,用于将所述第一传感器工作在复合临界区域时发送的所述极片位置数据进行镜像复制翻转得到镜像极片位置数据;将所述第二传感器工作在隔膜临界区域时发送的所述隔膜位置数据进行镜像复制翻转得到镜像隔膜位置数据;
24、计算模块,用于当从复合区域切换至隔膜区域时,根据所述镜像极片位置数据和所述隔膜位置数据通过加权平均计算所述反馈值;当从隔膜区域切换至复合区域时,根据所述镜像隔膜位置数据和所述极片位置数据通过加权平均计算所述反馈值;
25、纠偏模块,用于通过所述反馈值向纠偏器发送纠偏指令,以控制所述纠偏器进行走带纠偏。
26、可选的,所述计算模块,包括:
27、第一计算单元,用于根据所述镜像极片位置数据和所述隔膜位置数据分别计算第一反馈值和第二反馈值;
28、将所述第一反馈值和所述第二反馈值输入第一模型通过加权平均计算所述反馈值;其中所述第一模型的数学表达式为:
29、q=a*x+(1-a)*y
30、式中,q为所述反馈值,x为所述第一反馈值,y为所述第二反馈值,a为在预设时间内由1平滑衰减到0的数。
31、可选的,所述计算模块,包括:
32、第二计算单元,用于根据所述镜像隔膜位置数据和所述极片位置数据分别计算第三反馈值和第四反馈值;
33、将所述第三反馈值和所述第四反馈值输入第二模型通过加权平均计算所述反馈值;其中所述第二模型的数学表达式为:
34、q=b*m+(1-b)*n
35、式中,q为所述反馈值,m为所述第三反馈值,n为所述第四反馈值,b为在预设时间内由1平滑衰减到0的数。
36、为实现上述目的,本发明还提供一种走带纠偏设备,包括:
37、存储器,用于储存计算机程序;
38、处理器,用于执行所述计算机程序时实现任一项上述所述走带纠偏方法。
39、为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时,实现任一项上述所述走带纠偏方法。
40、本发明提供一种走带纠偏方法,包括:实时接收第一传感器发送的极片位置数据和第二传感器发送的隔膜位置数据,并进行缓存;将第一传感器工作在复合临界区域时发送的极片位置数据进行镜像复制翻转得到镜像极片位置数据;将第二传感器工作在隔膜临界区域时发送的隔膜位置数据进行镜像复制翻转得到镜像隔膜位置数据;当从复合区域切换至隔膜区域时,根据镜像极片位置数据和隔膜位置数据通过加权平均计算反馈值;当从隔膜区域切换至复合区域时,根据镜像隔膜位置数据和极片位置数据通过加权平均计算反馈值;通过反馈值向纠偏器发送纠偏指令,以控制纠偏器进行走带纠偏。
41、可见,本发明通过在切换区域时,使用复制的镜像数据和实时传输的极片位置数据或隔膜位置数据进行加权平均计算反馈值,从而实现传感器的平滑切换。避免了现有相关技术中,在切换传感器的过程中,计算的传感器数据的反馈值可能发生突变,而导致纠偏器摆动幅度过大,纠偏效果差的问题。
技术特征:
1.一种走带纠偏方法,其特征在于,包括:
2.根据权利要求1所述的走带纠偏方法,其特征在于,所述根据所述镜像极片位置数据和所述隔膜位置数据通过加权平均计算所述反馈值,包括:
3.根据权利要求1所述的走带纠偏方法,其特征在于,所述根据所述镜像隔膜位置数据和极片位置数据通过加权平均计算所述反馈值,包括:
4.根据权利要求1所述的走带纠偏方法,其特征在于,还包括:
5.根据权利要求1所述的走带纠偏方法,其特征在于,还包括:
6.一种走带纠偏装置,其特征在于,包括:
7.根据权利要求6所述装置,其特征在于,所述计算模块,包括:
8.根据权利要求6所述装置,其特征在于,所述计算模块,包括:
9.一种走带纠偏设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时,实现如权利要求1至5任一项所述走带纠偏方法。
技术总结
本发明公开了一种走带纠偏方法、装置、设备及计算机可读存储介质,应用于工业设备领域,本发明通过将第一传感器工作在复合临界区域时发送的极片位置数据进行镜像复制翻转得到镜像极片位置数据;将第二传感器工作在隔膜临界区域时发送的隔膜位置数据进行镜像复制翻转得到镜像隔膜位置数据;在切换区域时,使用复制的镜像翻转数据和实时传输的极片位置数据或隔膜位置数据进行加权平均计算反馈值,从而实现传感器的平滑切换。避免了现有相关技术中,在切换传感器的过程中,计算的传感器数据的反馈值可能发生突变,而导致纠偏器摆动幅度过大,纠偏效果差的问题。
技术研发人员:陈昊真,张俊峰,张锦亮,曹元坤,夏光荣,卢天华,倪军
受保护的技术使用者:安脉时代智能制造(宁德)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!