三个气缸或电动缸型蚕匾解码垛机的制作方法
本技术涉及一种解码垛机,特别是一种三个气缸或电动缸式蚕匾解码垛机。
背景技术:
1、本单位是专门研制养蚕设备的,在不断的使用和研究中,对原来的解码垛机进行改进,使得其更适用,提高工作效率。
技术实现思路
1、本实用新型要解决的技术问题是:提供一种三个气缸或电动缸式蚕匾解码垛机。
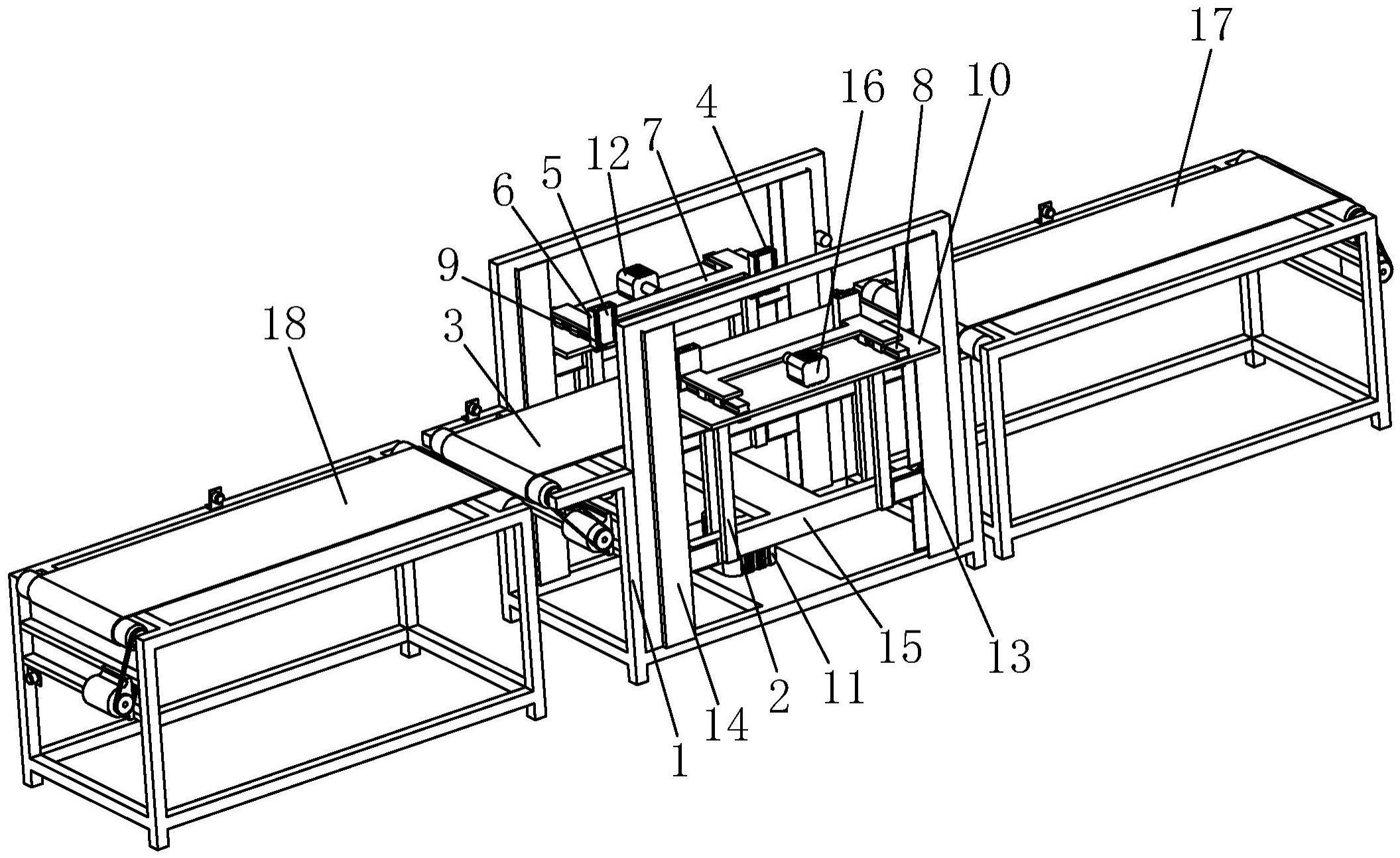
2、解决上述技术问题的技术方案是:一种三个气缸或电动缸式蚕匾解码垛机,包括机架、h形或u形的升降机械臂、输送带和控制器,所述的升降机械臂、输送带和控制器分别设置于机架上,所述的升降机械臂数量为2个,该2个升降机械臂分别设置于输送带两侧,所述的升降机械臂上设有水平伸缩的h形或u形的机械臂叉手、h形滑轨架和支撑台,所述h形或u形的机械臂叉手设置于支撑台上并分别位于输送带两侧,支撑台与h形或u形的升降机械臂连接,该h形或u形的机械臂叉手两个末端分别设有用于插入蚕匾凹槽中的两只防夹叉手,所述升降机械臂和机械臂叉手分别与气缸或电动缸连接,气缸或者电动缸的数量为3个,2个升降机械臂通过机械臂连接架与1个顶升的气缸或者电动缸连接,该顶升气缸或者电动缸固定安装于两个升降机械臂连接架的中部,即顶升的气缸或者电动缸安装于机械臂连接架下方的底座上并于机械臂连接架连接。输送带两侧的机械臂叉手分别与另外两个水平伸缩的气缸或电动缸连接,两个水平伸缩的气缸或电动缸分别安装于输送带两侧的支撑台上,每个水平伸缩的气缸或电动缸分别与两侧对应的h形或u形的机械臂叉手连接。
3、本实用新型的进一步技术方案是:输送带两侧的机械臂叉手分别为u形或h形结构的机械臂叉手,机械臂叉手分别通过滑块和导轨设置于支撑台上并分别与水平伸缩的气缸或电动缸连接。
4、机械臂连接架两端分别通过滑块或轮滑与滑轨连接,滑轨上设有u形槽状的保护罩。该保护罩能防止滑轨上布满灰尘,影响使用。
5、所述的机械臂叉手包括抬升杆和固定槽,所述的固定槽固定设置于支撑台上,抬升杆通过滑块或滑轮设置于固定槽中。
6、输送带两端分别设有等待输送带和暂存输送带,等待输送带和暂存输送带分别与相对应的电机连接。
7、由于采用上述技术方案,本实用新型之三个气缸或电动缸式蚕匾解码垛机,具有以下有益效果:
8、本实用新型在原来的基础上进行改进,原来的支撑台是通过摆动杆和机械臂连接架与电机连接,在使用过程中发现效率不是很高,故在此基础上,将支撑台与气缸或者电动缸连接,通过气缸直接控制支撑台上下移动,提高工作效率,也提高了传输的效率。且本实用新型在滑轨上设有保护罩,该保护罩能防止滑轨上布满灰尘,影响使用。
9、下面,结合说明书附图和具体实施例对本实用新型之三个气缸或电动缸式蚕匾解码垛机的技术特征作进一步的说明。
技术特征:
1.三个气缸或电动缸式蚕匾解码垛机,包括机架、h形或u形的升降机械臂、输送带和控制器,所述的升降机械臂、输送带和控制器分别设置于机架上,所述的升降机械臂数量为2个,分别设置于输送带两侧,所述的升降机械臂上设有水平伸缩的机械臂叉手和支撑台,所述的机械臂叉手设置于支撑台上并分别位于输送带两侧,支撑台与升降机械臂连接,该机械臂叉手下端设有用于插入蚕匾凹槽中的防夹叉手,其特征在于:所述升降机械臂和机械臂叉手分别与气缸或电动缸连接,气缸或者电动缸的数量为3个,两个升降机械臂通过机械臂连接架与1个顶升气缸或者电动缸连接,该顶升气缸或者电动缸固定安装于两个升降机械臂连接架的中部,输送带两侧的机械臂叉手分别与两侧两个水平伸缩的气缸或电动缸连接,两个水平伸缩的气缸或电动缸分别安装于输送带两侧的支撑台上,每个水平伸缩的气缸或电动缸分别与两侧对应的机械臂叉手连接。
2.根据权利要求1所述的三个气缸或电动缸式蚕匾解码垛机,其特征在于:输送带两侧的机械臂叉手分别为u形或h形结构的机械臂叉手,机械臂叉手分别通过滑块和导轨设置于支撑台上并分别与水平伸缩的气缸或电动缸连接。
3.根据权利要求1所述的三个气缸或电动缸式蚕匾解码垛机,其特征在于: 升降机械臂下端的连接杆两端分别通过滑块或轮滑与滑轨连接,滑轨上设有u形槽状的保护罩。
4.根据权利要求1所述的三个气缸或电动缸式蚕匾解码垛机,其特征在于:所述的机械臂叉手包括抬升杆和固定槽,所述的固定槽固定设置于支撑台上,抬升杆通过滑块或滑轮设置于固定槽中。
5.根据权利要求1所述的三个气缸或电动缸式蚕匾解码垛机,其特征在于:输送带两端分别设有等待输送带和暂存输送带,等待输送带和暂存输送带分别与电机连接。
技术总结
本技术涉及一种三个气缸或电动缸型蚕匾解码垛机,包括机架、升降机械臂、输送带和控制器,所述的升降机械臂、输送带和控制器分别设置于机架上,所述升降机械臂和机械臂叉手分别与气缸或电动缸连接,气缸或者电动缸的数量为3个,2个升降机械臂通过机械臂连接架与1个顶升的气缸或者电动缸连接,输送带两侧的机械臂叉手分别与另外两个水平伸缩的气缸或电动缸连接,顶升的气缸或者电动缸安装于机械臂连接架下方的底座上并于机械臂连接架连接,两个水平伸缩的气缸或电动缸分别安装于输送带两侧的支撑台上并与机械臂叉手连接。通过气缸直接控制支撑台上下移动,提高工作效率,也提高了传输的效率。
技术研发人员:韦东,潘志新,韦相立,杨杰,罗坚,彭业成,韦师妮,韦幂,黄尚勇,董长勋,文柳璎,邓忠榜,覃倩昳,李正多,韦小燕,胡聪,韦婕,李万光,梁静芳,韦国娟,陈振烽
受保护的技术使用者:柳州蚕润丝圆蚕业机械科技有限公司
技术研发日:20220128
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!