一种网片自动上料装置的制作方法
本技术涉及建筑工程机器人,尤其涉及一种网片自动上料装置。
背景技术:
1、目前在建筑领域,钢丝网片需要摆放在钢筋笼的上下两侧,人工摆放存在摆放不整齐的问题,摆下方网片时,因钢筋笼为桁架机器人提升,需钻入下方空间,存在巨大的安全风险以及涉及空间操作问题。
技术实现思路
1、本实用新型的目的是提供一种网片自动上料装置,用于桁架机器人的网片提升。
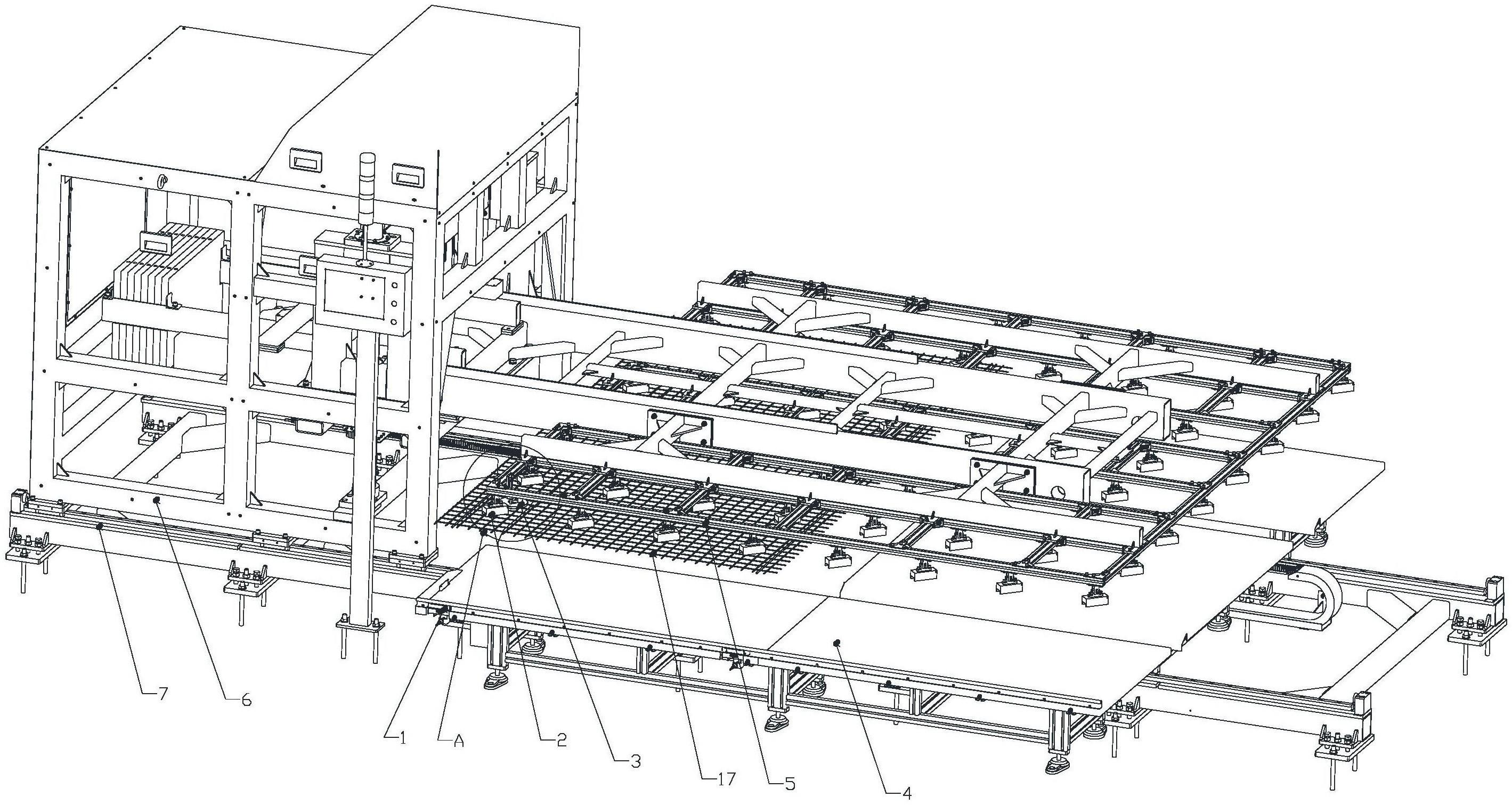
2、实现本实用新型目的的技术方案是:一种网片自动上料装置,包括用于放置网片的网片台、地轨组件、和设于地轨组件上的网片移栽总装,所述网片移栽总装包括网片到位感应机构、取料手掌结构、网片间接感应机构、电磁铁浮动安装机构和网片提升机构;
3、所述网片到位感应机构用于感应网片台上的网片到位信号;
4、所述网片提升机构用于给所述取料手掌结构提供升降动力;
5、所述网片间接感应机构用于为电磁铁浮动安装机构提供网片位置感应;
6、所述电磁铁浮动安装机构用于吸取网片台上的网片,为所述取料手掌结构进行取料;
7、所述取料手掌结构用于将网片台上的网片通过地轨组件移动至指定位置。
8、作为优选,所述网片到位感应机构为弹簧直动到位感应机构或者自重摆动到位感应机构。
9、作为优选,所述弹簧直动到位感应机构包括感应片、用于接触网片的接触块,所述接触块和感应片通过导向轴连接,所述导向轴上设有用于承载直线轴承的直线轴承固定块,所述导向轴沿所述直线轴承滑动,还包括沿所述直线轴承轴向设置的弹簧,所述直线轴承固定块与用于放置网片台的固定座相连,所述直线轴承固定块上沿直线轴承的轴线方向设有一用于感应所述感应片位移的弹簧直动到位感应器,所述接触块在网片的顶力作用下往外移,带动导向轴沿直线轴承方向往外移,从而使感应片接近所述弹簧直动到位感应器,所述弹簧直动到位感应器感应到信号后传输给控制器,指示网片已到位,可进行下一动作。
10、作为优选,所述自重摆动到位感应机构包括感应片、用于接触网片的接触块,所述接触块设于接触块安装座上,所述接触块安装座通过两相互平行设置的主摆杆和辅助摆杆铰接至摆杆安装座,所述接触块安装座、主摆杆、辅助摆杆、摆杆安装座形成联动的平行四边形连杆机构,所述摆杆安装座通过安装底板固定于安装件上,还包括设于接触块安装座上的感应片和设于摆杆安装座上的自重摆动到位感应器,所述接触块在网片的顶力作用下往外移,带动平行四边形连杆机构运动,从而使感应片接近或远离所述自重摆动到位感应器,所述自重摆动到位感应器感应到变换后的信号后传输给控制器,指示网片已到位,可进行下一动作。
11、作为优选,所述网片间接感应机构设于取料手掌结构下方,所述取料手掌结构通过所述网片间接感应机构实现网片的自动感应,所述网片间接感应机构包括接触端,所述接触端上设有两个导向柱,还包括感应机构固定座和固定于感应机构固定座上的用于承载线性轴承的线性轴承座,所述导向柱穿过所述线性轴承的轴孔设置,所述接触端上设有间接感应片,所述线性轴承座上设有间接感应器,所述取料手掌结构下移,带动网片间接感应机构下移接触网片,所述接触端上的间接感应片通过线性轴承在导向柱的导向作用下上移,从而使间接感应片接近所述间接感应器,所述间接感应器感应到信号后传输给控制器,指示网片已到位,可进行下一动作。
12、作为优选,所述电磁铁浮动安装机构设于取料手掌结构下方,所述取料手掌结构通过所述电磁铁浮动安装机构实现网片的自动取料,所述电磁铁浮动安装机构包括电磁铁、设于电磁铁上的连接块,所述连接块上设置的销轴与升降摇摆固定块活动连接,所述升降摇摆固定块顶端与取料手掌结构连接,所述升降摇摆固定块上设有一腰型孔,所述销轴通过所述腰型孔带动电磁铁进行柔性浮动。
13、作为优选,所述取料手掌结构包括至少两根主骨架、向主骨架两侧延伸的副骨架,所述主骨架和副骨架下设有型材框架,所述型材框架下端设有用于吸取网片的电磁铁浮动安装机构,所述主骨架一端连接所述副骨架,另一端插入网片提升机构,所述网片提升机构通过带动取料手掌结构上升或下降,从而使所述电磁铁浮动安装机构实现网片的吸取料和放料。
14、作为优选,所述网片提升机构包括底架、上底板、四字型框架、蜗轮蜗杆升降机和电机,所述四字型框架连接至取料手掌结构,所述四字型框架包括两个相互平行的主支架、与所述主支架垂直设置的提升横梁、底部托架和辅助支架,所述底部托架设于主支架下端且与所述提升横梁平行,所述辅助支架设于提升横梁与底部托架间且与所述底部托架垂直设置;所述底架顶端设有上底板,导向杆依次穿过所述上底板、主支架连接至底架,所述蜗轮蜗杆升降机穿过所述上底板设置并与所述提升横梁连接,所述电机带动蜗轮蜗杆升降机在导向杆的作用下工作,从而使四字型框架实现升降,进一步带动取料手掌结构实现升降。
15、采用了上述技术方案,本实用新型具有以下的有益效果:(1)本实用新型结构巧妙,相较于工人完全手动的生产作业方式而言,该机构可保证每次上料质量一致,人员安全得到保证。
16、(2)所述网片间接感应机构可有效检测铁丝网片是否在取料手掌上,同时作用在网片上的力为机构活动部分的重力,通过采用塑料等密度小的材料,降低该机构对磁铁吸产品的影响,防止网片变形。
17、(3)所述电磁铁浮动安装机构的设置采用电磁铁、连接块,销轴与升降摇摆固定块活动连接,可实现在竖直方向的浮动和水平方向的角度摆动,以适应网片的变形问题,电磁铁柔性适应性显著提高,且经济成本低,适宜大规模推广。
18、(4)所述网片提升机构主要解决提升导向机构的结构稳定性以及安装时如何保证垂直度等问题;四字型框架多点连接下底板,多点受力均摊压力,使机构变形降到最低。保证了整体机构的强度和两边导向杆的安装和调整在同一个平面上,更容易保证垂直度,从而使导向结构稳定。
19、(5)所述网片到位感应机构主要针对感应的产品没有确定的位置,但是又在一定的范围内变化的情况。由于钢丝网片的规格及铁丝位置不定,采用直接感应无确定的安装位置,实现自动化感应,效率大大提升。
技术特征:
1.一种网片自动上料装置,其特征在于:包括用于放置网片(17)的网片台(4)、地轨组件(7)、和设于地轨组件上的网片移栽总装,所述网片移栽总装包括网片到位感应机构(1)、取料手掌结构(5)、网片间接感应机构(3)、电磁铁浮动安装机构(2)和网片提升机构(6);
2.根据权利要求1所述的网片自动上料装置,其特征在于:所述自重摆动到位感应机构包括感应片(16)、用于接触网片(17)的接触块(11),所述接触块设于接触块安装座(1-3)上,所述接触块安装座通过两相互平行设置的主摆杆(1-1)和辅助摆杆(1-4)铰接至摆杆安装座(1-5),所述接触块安装座、主摆杆、辅助摆杆、摆杆安装座形成联动的平行四边形连杆机构,所述摆杆安装座通过安装底板(1-2)固定于安装件上,还包括设于接触块安装座上的感应片(16)和设于摆杆安装座上的自重摆动到位感应器(18),所述接触块在网片的顶力作用下往外移,带动平行四边形连杆机构运动,从而使感应片接近或远离所述自重摆动到位感应器,所述自重摆动到位感应器感应到变换后的信号后传输给控制器,指示网片已到位,可进行下一动作。
3.根据权利要求1或2所述的网片自动上料装置,其特征在于:所述网片间接感应机构(3)设于取料手掌结构(5)下方,所述取料手掌结构通过所述网片间接感应机构实现网片(17)的自动感应,所述网片间接感应机构包括接触端(31),所述接触端上设有两个导向柱(35),还包括感应机构固定座(37)和固定于感应机构固定座上的用于承载线性轴承(34)的线性轴承座(36),所述导向柱穿过所述线性轴承的轴孔设置,所述接触端上设有间接感应片(32),所述线性轴承座上设有间接感应器(33),所述取料手掌结构下移,带动网片间接感应机构下移接触网片,所述接触端上的间接感应片通过线性轴承在导向柱的导向作用下上移, 从而使间接感应片接近所述间接感应器,所述间接感应器感应到信号后传输给控制器,指示网片已到位,可进行下一动作。
4.根据权利要求3所述的网片自动上料装置,其特征在于:所述电磁铁浮动安装机构(2)设于取料手掌结构(5)下方,所述取料手掌结构通过所述电磁铁浮动安装机构实现网片(17)的自动取料,所述电磁铁浮动安装机构包括电磁铁(24)、设于电磁铁上的连接块(23),所述连接块上设置的销轴(22)与升降摇摆固定块(21)活动连接,所述升降摇摆固定块顶端与取料手掌结构连接,所述升降摇摆固定块上设有一腰型孔(25),所述销轴通过所述腰型孔带动电磁铁进行柔性浮动。
5.根据权利要求4所述的网片自动上料装置,其特征在于:所述取料手掌结构(5)包括至少两根主骨架(51)、向主骨架两侧延伸的副骨架(52),所述主骨架和副骨架下设有型材框架(54),所述型材框架下端设有用于吸取网片(17)的电磁铁浮动安装机构(2),所述主骨架一端连接所述副骨架,另一端插入网片提升机构(6),所述网片提升机构通过带动取料手掌结构上升或下降,从而使所述电磁铁浮动安装机构实现网片的吸取料和放料。
6.根据权利要求5所述的网片自动上料装置,其特征在于:所述网片提升机构(6)包括底架(66)、上底板(67)、四字型框架、蜗轮蜗杆升降机(68)和电机(69),所述四字型框架连接至取料手掌结构(5),所述四字型框架包括两个相互平行的主支架(62)、与所述主支架垂直设置的提升横梁(61)、底部托架(65)和辅助支架(63),所述底部托架设于主支架下端且与所述提升横梁平行,所述辅助支架设于提升横梁与底部托架间且与所述底部托架垂直设置;所述底架顶端设有上底板,导向杆(610)依次穿过所述上底板、主支架连接至底架,所述蜗轮蜗杆升降机穿过所述上底板设置并与所述提升横梁连接,所述电机带动蜗轮蜗杆升降机在导向杆的作用下工作,从而使四字型框架实现升降,进一步带动取料手掌结构实现升降。
技术总结
本技术公开了一种网片自动上料装置,包括用于放置网片的网片台、地轨组件、和设于地轨组件上的网片移栽总装,所述网片移栽总装包括网片到位感应机构、取料手掌结构、网片间接感应机构、电磁铁浮动安装机构和网片提升机构;所述网片到位感应机构用于感应网片台上的网片到位信号;所述网片提升机构用于给所述取料手掌结构提供升降动力;所述网片间接感应机构用于为电磁铁浮动安装机构提供网片位置感应;所述电磁铁浮动安装机构用于吸取网片台上的网片,为所述取料手掌结构进行取料;所述取料手掌结构用于将网片台上的网片通过地轨组件移动至指定位置。本技术可实现全自动化网片上料,保证每次上料质量一致,人员安全得到保证。
技术研发人员:刘付钧,刘紫敬,李祖保,谭石平,江青华,覃祥延
受保护的技术使用者:广州容联建筑科技有限公司
技术研发日:20220424
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!