一种物流仓储使用的AGV物流运载机器人的制作方法
一种物流仓储使用的agv物流运载机器人
技术领域
1.本实用新型涉及agv物流运载设备技术领域,具体为一种物流仓储使用的agv物流运载机器人。
背景技术:
2.agv物流运载机器人是自动化仓储物流系统中重要的组成部分,agv物流运载机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,磁钉导航、惯性导航,随着工厂自动化、计算机集成制造系统技术逐步发展、以及柔性制造系统、自动化立体仓库的广泛应用,agv作为联系和调节离散型物流管理系统使其作业连续化的必要自动化搬运装卸手段,其应用范围和技术水平得到了迅猛的发展。
3.然而现有的agv物流运载机器人在使用过程中还存在以下问题:首先,现有的agv物流运载机器人只设置有一层装载板用来装载搬运货物,载货空间小,搬运效率极低;其次,现有的agv物流运载机器人都未设置夹紧机构,货物在搬运过程中极易晃动造成货物内部损坏,存在极大安全隐患。
技术实现要素:
4.本实用新型的目的在于针对上述的不足,提供一种搬运效率高,搬运过程更稳固可靠的物流仓储使用的agv物流运载机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种物流仓储使用的agv物流运载机器人,包括agv小车,设置于所述agv小车上的底座,设置于所述底座一侧的控制装置,所述底座上方设置有多层运载板,相邻所述运载板之间通过升降组件连接,所述运载板上设置有夹紧组件,所述agv小车、升降组件和夹紧组件均电性连接所述控制装置。
7.进一步,所述运载板至少设置有两层,相邻两层所述运载板上下正对设置。
8.进一步,所述运载板为矩形板,所述升降组件为四根电动伸缩杆,四根所述电动伸缩杆固定在下层的运载板上,所述电动伸缩杆的活塞杆杆头竖直向上伸出驱动连接上层的运载板,四根所述电动伸缩杆分别靠近所述运载板的四角设置。
9.进一步,所述夹紧组件包括固定在所述运载板上的固定块,正对所述固定块设置的夹紧块,用于驱动所述夹紧块靠近或远离所述固定块所采用的两个夹紧驱动气缸,所述夹紧驱动气缸固定在所述固定块内,所述夹紧驱动气缸的活塞杆杆头水平伸出驱动连接所述夹紧块。
10.进一步,所述固定块和夹紧块的正对面上均设置有防滑减震垫。
11.进一步,所述控制装置包括电性连接的触控显示器和控制器。
12.本实用新型的有益效果是:
13.实际应用中,通过设置多层运载板,相邻运载板之间通过升降组件连接,加大了货物的载运空间;通过夹紧组件可将运载板上的货物夹紧,防止货物在搬运过程中晃动;本实
用新型搬运效率高,搬运过程更稳固可靠。
附图说明
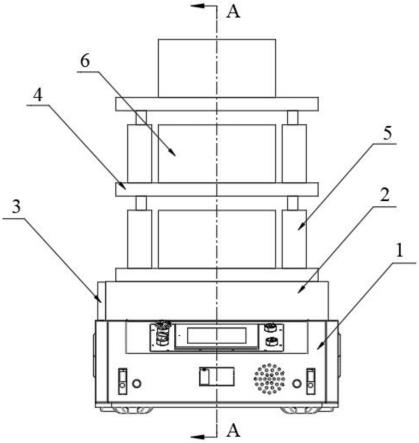
14.图1是本实用新型的主视图;
15.图2是本实用新型的左视图;
16.图3是图1中a-a处剖示图;
17.附图标记:agv小车1;底座2;控制装置3;运载板4;升降组件5;夹紧组件6;固定块61;夹紧块62;夹紧驱动气缸63;防滑减震垫64。
具体实施方式
18.如图1、图2和图3所示,一种物流仓储使用的agv物流运载机器人,包括agv小车1,设置于所述agv小车1上的底座2,设置于所述底座2一侧的控制装置3,所述底座2上方设置有多层运载板4,相邻所述运载板4之间通过升降组件5连接,所述运载板4上设置有夹紧组件6,所述agv小车1、升降组件5和夹紧组件6均电性连接所述控制装置3。
19.使用时,通过设置多层运载板4,相邻运载板4之间通过升降组件5连接,加大了货物的载运空间;通过夹紧组件6可将运载板4上的货物夹紧,防止货物在搬运过程中晃动;本实用新型搬运效率高,搬运过程更稳固可靠。
20.如图1、图2和图3所示,所述运载板4至少设置有两层,相邻两层所述运载板4上下正对设置;本实施例中,通过设置至少两层运载板4,加大了货物的载运空间,搬运效率高。
21.如图1、图2和图3所示,所述运载板4为矩形板,所述升降组件5为四根电动伸缩杆,四根所述电动伸缩杆固定在下层的运载板4上,所述电动伸缩杆的活塞杆杆头竖直向上伸出驱动连接上层的运载板4,四根所述电动伸缩杆分别靠近所述运载板4的四角设置;本实施例中,通过电动伸缩杆的活塞杆杆头伸缩,驱动上层的运载板4远离或靠近下层的运载板4,调整两块运载板4之间的距离。
22.如图1、图2和图3所示,所述夹紧组件6包括固定在所述运载板4上的固定块61,正对所述固定块61设置的夹紧块62,用于驱动所述夹紧块62靠近或远离所述固定块61所采用的两个夹紧驱动气缸63,所述夹紧驱动气缸63固定在所述固定块61内,所述夹紧驱动气缸63的活塞杆杆头水平伸出驱动连接所述夹紧块62;本实施例中,通过夹紧驱动气缸63的活塞杆杆头伸缩,驱动夹紧块62靠近或远离固定块61,将货物夹紧在夹紧块62与固定块61之间,搬运过程更稳固可靠。
23.如图1、图2和图3所示,所述固定块61和夹紧块62的正对面上均设置有防滑减震垫64;本实施例中,通过在固定块61和夹紧块62的正对面上均设置防滑减震垫64,能有效防止货物在夹紧后松动。
24.如图1、图2和图3所示,所述控制装置3包括电性连接的触控显示器和控制器;本实施例中,通过控制器控制升降组件5、夹紧组件6和agv小车1,通过触控显示器输入和显示控制内容。
25.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神所定义的范围。
技术特征:
1.一种物流仓储使用的agv物流运载机器人,其特征在于:包括agv小车(1),设置于所述agv小车(1)上的底座(2),设置于所述底座(2)一侧的控制装置(3),所述底座(2)上方设置有多层运载板(4),相邻所述运载板(4)之间通过升降组件(5)连接,所述运载板(4)上设置有夹紧组件(6),所述agv小车(1)、升降组件(5)和夹紧组件(6)均电性连接所述控制装置(3)。2.根据权利要求1所述的一种物流仓储使用的agv物流运载机器人,其特征在于:所述运载板(4)至少设置有两层,相邻两层所述运载板(4)上下正对设置。3.根据权利要求2所述的一种物流仓储使用的agv物流运载机器人,其特征在于:所述运载板(4)为矩形板,所述升降组件(5)为四根电动伸缩杆,四根所述电动伸缩杆固定在下层的运载板(4)上,所述电动伸缩杆的活塞杆杆头竖直向上伸出驱动连接上层的运载板(4),四根所述电动伸缩杆分别靠近所述运载板(4)的四角设置。4.根据权利要求1所述的一种物流仓储使用的agv物流运载机器人,其特征在于:所述夹紧组件(6)包括固定在所述运载板(4)上的固定块(61),正对所述固定块(61)设置的夹紧块(62),用于驱动所述夹紧块(62)靠近或远离所述固定块(61)所采用的两个夹紧驱动气缸(63),所述夹紧驱动气缸(63)固定在所述固定块(61)内,所述夹紧驱动气缸(63)的活塞杆杆头水平伸出驱动连接所述夹紧块(62)。5.根据权利要求4所述的一种物流仓储使用的agv物流运载机器人,其特征在于:所述固定块(61)和夹紧块(62)的正对面上均设置有防滑减震垫(64)。6.根据权利要求1所述的一种物流仓储使用的agv物流运载机器人,其特征在于:所述控制装置(3)包括电性连接的触控显示器和控制器。
技术总结
本实用新型涉及AGV物流运载设备技术领域,具体为一种物流仓储使用的AGV物流运载机器人,包括AGV小车,设置于所述AGV小车上的底座,设置于所述底座一侧的控制装置,所述底座上方设置有多层运载板,相邻所述运载板之间通过升降组件连接,所述运载板上设置有夹紧组件,所述AGV小车、升降组件和夹紧组件均电性连接所述控制装置;实际应用中,通过设置多层运载板,相邻运载板之间通过升降组件连接,加大了货物的载运空间;通过夹紧组件可将运载板上的货物夹紧,防止货物在搬运过程中晃动;本实用新型搬运效率高,搬运过程更稳固可靠。搬运过程更稳固可靠。搬运过程更稳固可靠。
技术研发人员:罗成
受保护的技术使用者:苏州冈昭科技有限公司
技术研发日:2022.05.24
技术公布日:2023/1/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1