一种多功能环卫巡检机器人的制作方法
本技术涉及机器人,具体为一种多功能环卫巡检机器人。
背景技术:
1、现有技术的不足之处在于:现有的环卫机器人在使用时,通常会将所捡拾到的垃圾分类放置在不同的垃圾桶内部,之后返回站点由工人将垃圾取下,但机器人上的垃圾桶结构简单,难以快速将垃圾从机器人身上的垃圾桶取出,实用性有待提高。
技术实现思路
1、本实用新型的目的在于提供一种多功能环卫巡检机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种多功能环卫巡检机器人,包括机器人本体,所述机器人本体的两侧上均滑动设置有承载桶,所述机器人本体的两侧上均设置有滑轨,每个所述承载桶底部均开设有滑槽,每个所述滑轨均与对应的滑槽滑动连接,每个所述滑轨与对应的滑槽之间均设置有多组锁止机构,所述锁止机构包括承载杆,所承载杆安装在滑轨上,所述承载杆上开设有限位槽,限位槽内滑动设置有定位球,所述定位球与对应的限位槽之间均设置有定位弹簧,所述承载桶内部开设有定位球相适配的卡接槽。
3、进一步地,所述承载杆的两端上均开设有限位槽,所述定位球以及定位弹簧均有两组,分别位于对应的限位槽内。
4、进一步地,所述机器人本体的两侧上均开设有承载槽,每个所述承载槽内均设置有安装架,两所述承载桶均滑动设置在对应的安装架内,所述滑轨设置在安装架内。
5、进一步地,每个所述安装架顶部上均转动连接有盖板,所述机器人本体的两侧上均设置有驱动电机,两所述驱动电机分别驱使对应的盖板转动。
6、进一步地,所述机器人本体周侧上均通过卡接组件安装有防护垫。
7、进一步地,所述机器人本体正前方设置有探照灯。
8、与现有技术相比,本实用新型的有益效果是:该多功能环卫巡检机器人,通过机器人本体、承载桶、滑轨、滑槽、锁止机构、承载杆、限位槽、定位球以及卡接槽之间的配合,定位球受到定位弹簧的弹性作用,卡接在位于承载桶上的卡接槽内,便可以将承载桶固定安装在机器人本体内部,反之便可以将承载桶从机器人本体滑出,将承载桶内部的垃圾快速清理,提高工作效率。
技术特征:
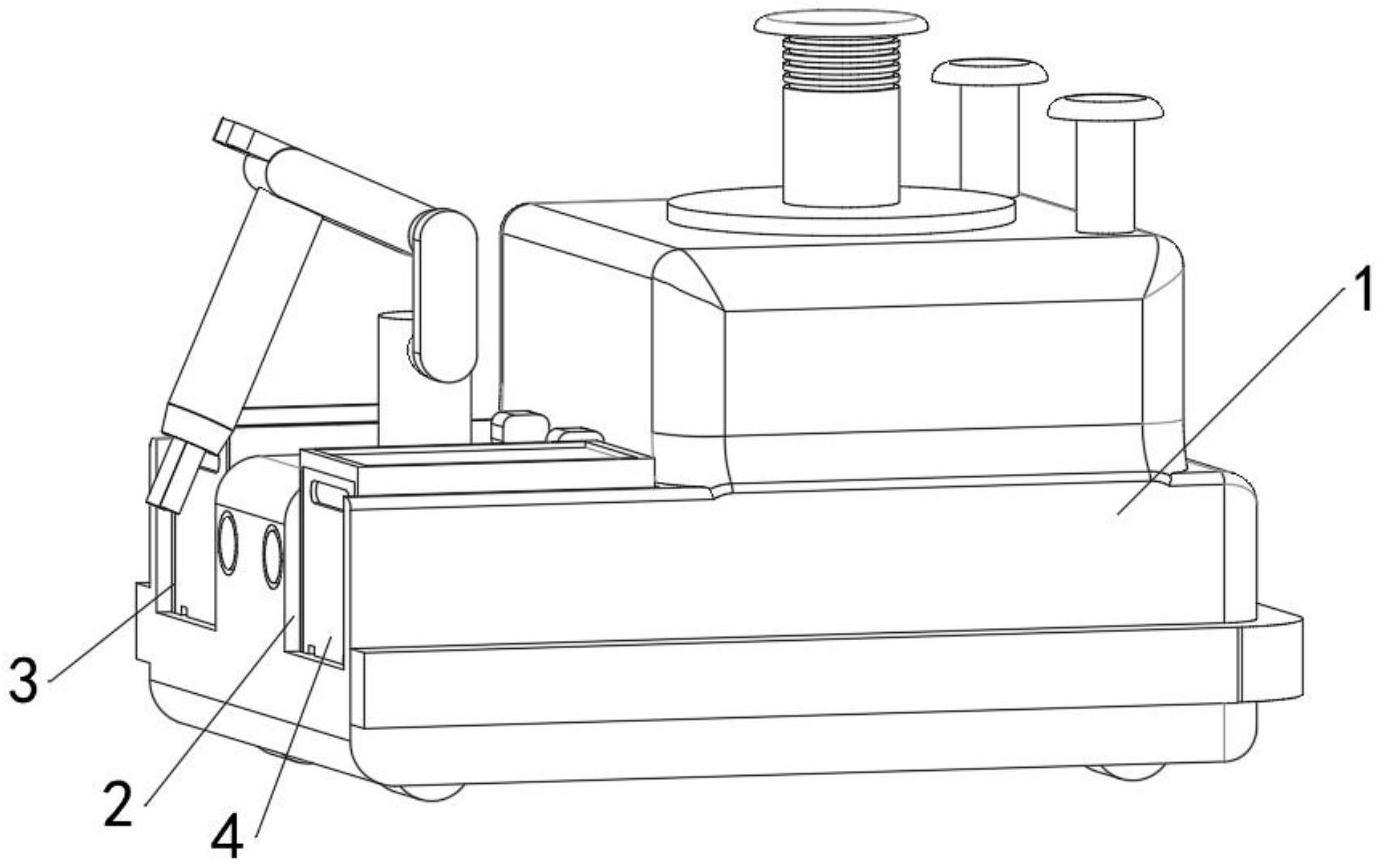
1.一种多功能环卫巡检机器人,包括机器人本体(1),其特征在于:
2.根据权利要求1所述的一种多功能环卫巡检机器人,其特征在于:所述承载杆(701)的两端上均开设有限位槽(702),所述定位球(703)以及定位弹簧(704)均有两组,分别位于对应的限位槽(702)内。
3.根据权利要求1所述的一种多功能环卫巡检机器人,其特征在于:所述机器人本体(1)的两侧上均开设有承载槽(2),每个所述承载槽(2)内均设置有安装架(3),两所述承载桶(4)均滑动设置在对应的安装架(3)内;
4.根据权利要求3所述的一种多功能环卫巡检机器人,其特征在于:每个所述安装架(3)顶部上均转动连接有盖板(8),所述机器人本体(1)的两侧上均设置有驱动电机(9),两所述驱动电机(9)分别驱使对应的盖板(8)转动。
5.根据权利要求1所述的一种多功能环卫巡检机器人,其特征在于:所述机器人本体(1)周侧上均通过卡接组件安装有防护垫(11)。
6.根据权利要求1所述的一种多功能环卫巡检机器人,其特征在于:所述机器人本体(1)正前方设置有探照灯(10)。
技术总结
本技术公开了一种多功能环卫巡检机器人,包括机器人本体,所述机器人本体的两侧上均滑动设置有承载桶,所述机器人本体的两侧上均设置有滑轨,每个所述承载桶底部均开设有滑槽,每个所述滑轨均与对应的滑槽滑动连接,每个所述滑轨与对应的滑槽之间均设置有多组锁止机构,所述锁止机构包括承载杆,所述承载杆上开设有限位槽,限位槽内滑动设置有定位球,所述定位球与对应的限位槽之间均设置有定位弹簧,所述承载桶内部开设有定位球相适配的卡接槽。定位球受到定位弹簧的弹性作用,卡接在位于承载桶上的卡接槽内,便可以将承载桶固定安装在机器人本体内部,反之便可以将承载桶从机器人本体滑出,将承载桶内部的垃圾快速清理,效果好。
技术研发人员:方陆芳,江华平
受保护的技术使用者:杭州春林科技有限公司
技术研发日:20220610
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!