适用于汽车搬运机器人的行走装置的制作方法
1.本实用新型涉及自动化机械设备领域,具体涉及汽车行走部件设计。
背景技术:
2.随着机械自动设备的智能化普及,越来越多的传统工序从人工操作变为机械化操作。其中,汽车作为大型部件,在生产、加工、物流、维修、智能停车过程中需要进行搬运移动,往往采用自动化搬运设备,如搬运机器人进行操作。
3.为了在搬运过程中对车身做到零损伤零变形,往往搬运机器人与汽车的接触点为汽车轮胎,此时就需要使用到轮胎夹持臂或轮胎支撑臂等部件。
4.如公开号为cn113605766a的中国专利文件公开了一种搬运机器人,其在限位叉臂上安装了货叉,机器人的机甲上安装有行走轮这样的行走装置,货叉侧向靠近车体,一前一后夹持轮胎,从而达到对车辆接触,移动车辆的技术效果。
5.然而,该种技术方案存在一定的缺陷,首先,行走轮的前进方向往往为货叉延伸的方向,即车架的宽度方向。这样的侧向行走方式在搬运汽车过程中较为不便。如,在行走轮前行的时候货叉与轮胎轮毂发生碰撞。其次,行走轮往往行驶在与之匹配的轨道上,而轨道上存在轨道缝隙,当行走轮走过轨道缝隙处,容易悬空,从而整个搬运机器人前进不顺畅。
技术实现要素:
6.本实用新型的目的是提供适用于汽车搬运机器人的行走装置,前进过程中不容易出现轨道缝隙卡轮的现象,行走顺畅,稳定度高。
7.适用于汽车搬运机器人的行走装置,包含车架和安装在所述车架上的驱动轮套件,还包含行走驱动装置,所述驱动轮套件为两套,分布在所述车架的宽度方向的两侧,每套所述驱动轮套件均包含驱动轮一和驱动轮二,所述行走驱动装置驱动所述驱动轮一和所述驱动轮二旋转,所述驱动轮一和所述驱动轮二的行驶方向为所述车架的长度方向,所述驱动轮一和所述驱动轮二的布置方向也为所述车架的长度方向。
8.作为本实用新型的优选,所述驱动轮一和所述驱动轮二分别连接有轴一和轴二,所述轴一和轴二之间通过同步链连接传动,所述行走驱动装置驱动所述轴一旋转。
9.作为本实用新型的优选,所述行走驱动装置包含行走电机和与所述行走电机的动力输出端连接的主传动链,所述主传动链与所述轴一传动连接。
10.作为本实用新型的优选,两个所述轴一之间通过联轴器连接。
11.作为本实用新型的优选,所述车架上还安装有从动轮套件,所述从动轮套件安装在所述车架上长度方向一侧,所述驱动轮套件安装在所述车架上长度方向另一侧。
12.作为本实用新型的优选,所述车架上安装有触碰气囊。
13.作为本实用新型的优选,所述触碰气囊安装在所述车架长度方向上的一端。
14.作为本实用新型的优选,所述触碰气囊的延伸方向为斜上方延伸,且所述触碰气囊在高度方向上高于所述车架的高度,在所述驱动轮套件的行驶前后方向上更靠前于所述
车架。
15.作为本实用新型的优选,所述触碰气囊内安装有压力波传感器,所述压力波传感器与所述行走驱动装置通信连接。
16.综上所述,本实用新型具有如下有益效果:
17.1、每套驱动轮套件均为“双轮配合,前后排布”的方式设计。在机器人前进或后退的过程中,无论是哪个驱动轮遇到了导轨缝隙出现了悬空的情况,另一个驱动轮依然存在动力,使得机器人可以继续行驶。
18.2、两套驱动轮套件从同一个行走电机处获得动力,同步性好。
19.3、车辆底盘若过低,会先触碰到软性的触碰气囊,压力波传感器出信号,行走电机停止运行,整个机器人停止前进,保护车辆底盘。
20.附图说明:
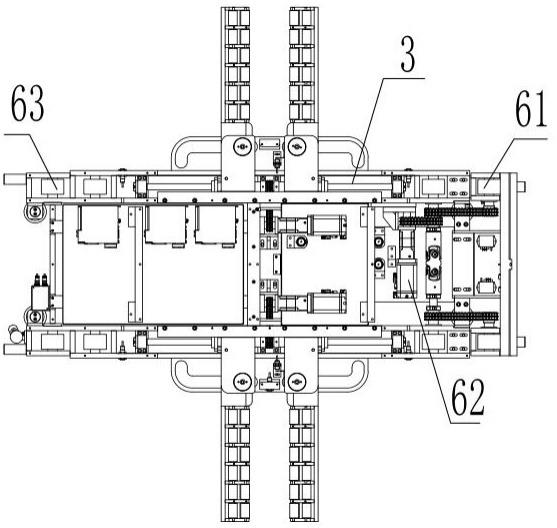
21.图1是实施例1的示意图;
22.图2是图1的右侧零部件的放大示意图;
23.图3是图1的侧视图;
24.图4是图3中的a处细节放大图。
25.图中:
26.3、车架,61、驱动轮套件,611、驱动轮一,612、驱动轮二,613、轴一,614、轴二,615、同步链,62、行走驱动装置,621、行走电机,622、主传动链,63、从动轮套件,64、触碰气囊,65、联轴器。
具体实施方式
27.以下结合附图对本实用新型作进一步详细说明。
28.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
29.实施例1,适用于汽车搬运机器人的行走装置,如图1所示,包含车架3,车架3可以为一个框型结构,大致呈矩形。在车架3的宽度方向的两侧设有用于夹持汽车车轮的夹持套件,且夹持套件在车架3的宽度方向上延伸。
30.在车架3上设有两套从动轮套件63和两套驱动轮套件61。从动轮套件63位于车架3长度方向一侧,驱动轮套件61位于车架3长度方向上的另一侧。前者不连接动力系统,后者则通过行走驱动装置62获得行走的驱动力。
31.如图2所示,行走电机621的动力输出端连接主传动链622。主传动链622套设在其中一个轴一613上。两套驱动轮套件61的两个轴一613之间通过联轴器65连接,至此,两套驱动轮套件61从同一个行走电机621处获得动力,同步性好。
32.每套驱动轮套件61均为“双轮配合,前后排布”的方式设计。包含驱动轮一611和驱动轮二612,在车架3的长度方向上排布,即轮子的行驶方向上排布。两个驱动轮分别连接有轴一613和轴二614,两个轴通过同步链615传动连接。同步链615可以为现有技术中的链条匹配链轮,或者是同步带形式。至此,行走电机621的动力就传动给了驱动轮一611和驱动轮二612。在机器人前进或后退的过程中,无论是哪个驱动轮遇到了导轨缝隙出现了悬空的情
况,另一个驱动轮依然存在动力,使得机器人可以继续行驶。
33.如图3所示,在机器人的行驶方向,即车架3的长度方向,即图3中的左右方向,设有触碰气囊64。如图4所示,触碰气囊64向斜上方延伸,其高于车架3,也比车架3更为靠前。当车架3需要下潜进入到车辆的底盘下方时,若车辆底盘过低,会有触碰损伤的风险。此时车辆底盘会先触碰到软性的触碰气囊64,气囊体发生形变,内部气压变化。该气压变化被安装在气囊体内的压力波传感器捕捉到。压力波传感器与行走电机621通讯连接,行走电机621停止运行,使得整个机器人停止前进。
技术特征:
1.适用于汽车搬运机器人的行走装置,包含车架(3)和安装在所述车架(3)上的驱动轮套件(61),其特征在于:还包含行走驱动装置(62),所述驱动轮套件(61)为两套,分布在所述车架(3)的宽度方向的两侧,每套所述驱动轮套件均包含驱动轮一(611)和驱动轮二(612),所述行走驱动装置(62)驱动所述驱动轮一(611)和所述驱动轮二(612)旋转,所述驱动轮一(611)和所述驱动轮二(612)的行驶方向为所述车架(3)的长度方向,所述驱动轮一(611)和所述驱动轮二(612)的布置方向也为所述车架(3)的长度方向。2.根据权利要求1所述的适用于汽车搬运机器人的行走装置,其特征在于:所述驱动轮一(611)和所述驱动轮二(612)分别连接有轴一(613)和轴二(614),所述轴一(613)和轴二(614)之间通过同步链(615)连接传动,所述行走驱动装置(62)驱动所述轴一(613)旋转。3.根据权利要求2所述的适用于汽车搬运机器人的行走装置,其特征在于:所述行走驱动装置(62)包含行走电机(621)和与所述行走电机(621)的动力输出端连接的主传动链(622),所述主传动链(622)与所述轴一(613)传动连接。4.根据权利要求3所述的适用于汽车搬运机器人的行走装置,其特征在于:两个所述轴一(613)之间通过联轴器(65)连接。5.根据权利要求1-4任意一项所述的适用于汽车搬运机器人的行走装置,其特征在于:所述车架(3)上还安装有从动轮套件(63),所述从动轮套件(63)安装在所述车架(3)上长度方向一侧,所述驱动轮套件(61)安装在所述车架(3)上长度方向另一侧。6.根据权利要求1-4任意一项所述的适用于汽车搬运机器人的行走装置,其特征在于:所述车架(3)上安装有触碰气囊(64)。7.根据权利要求6所述的适用于汽车搬运机器人的行走装置,其特征在于:所述触碰气囊(64)安装在所述车架(3)长度方向上的一端。8.根据权利要求6所述的适用于汽车搬运机器人的行走装置,其特征在于:所述触碰气囊(64)的延伸方向为斜上方延伸,且所述触碰气囊(64)在高度方向上高于所述车架(3)的高度,在所述驱动轮套件(61)的行驶前后方向上更靠前于所述车架(3)。9.根据权利要求6所述的适用于汽车搬运机器人的行走装置,其特征在于:所述触碰气囊(64)内安装有压力波传感器,所述压力波传感器与所述行走驱动装置(62)通信连接。
技术总结
本实用新型涉及自动化机械设备领域,具体涉及汽车行走部件设计。本实用新型是通过以下技术方案得以实现的:适用于汽车搬运机器人的行走装置,包含车架和安装在所述车架上的驱动轮套件,还包含行走驱动装置,所述驱动轮套件为两套,分布在所述车架的宽度方向的两侧,每套所述驱动轮套件均包含驱动轮一和驱动轮二,所述行走驱动装置驱动所述驱动轮一和所述驱动轮二旋转,所述驱动轮一和所述驱动轮二的行驶方向为所述车架的长度方向,所述驱动轮一和所述驱动轮二的布置方向也为所述车架的长度方向。本实用新型的目的是提供适用于汽车搬运机器人的行走装置,前进过程中不容易出现轨道缝隙卡轮的现象,行走顺畅,稳定度高。稳定度高。稳定度高。
技术研发人员:韦亮 李探宏 初程辉
受保护的技术使用者:浙江诺力车库设备制造有限公司
技术研发日:2022.07.08
技术公布日:2022/12/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1