一种基于机器人的晶元片上下料机的制作方法
1.本实用新型涉及自动上下料装置技术领域,特别涉及一种基于机器人的晶元片上下料机。
背景技术:
2.半导体芯片行业有一道工序是晶元片的前期加工,这个工序需要对晶元片表面进行研磨抛光再清洗,再把晶元片取出插入到专用篮具内。此时要把晶元片从工装上取出就出现了很大的难点,因为抛光清洗后的晶元片表面不可以和任何物体接触,而晶元片薄而脆,研磨抛光的工装支撑面也没有任何缺口,晶元片就紧密的贴在工装平面上。目前是人工采用薄片去把晶元片翘起来,其中由于人工的熟练度、力道控制及工作疲劳度等造成破片率大于1%,极大的提高了生产成本。
技术实现要素:
3.针对背景技术中所存在的技术问题,本实用新型的目的在于提供一种基于机器人的晶元片上下料机,可代替人工取片,提升稳定性和良率。
4.为了实现上述目的,本实用新型采用的技术方案如下:
5.一种基于机器人的晶元片上下料机,包括机架、固定在所述机架内部的工作台、设在所述工作台上方的工装输送机构、放置在所述工装输送机构上的若干工装、设在所述工装输送机构侧边的篮具、设在所述篮具正上方的第一视觉定位系统、固定在所述机架顶部的上下料机器人以及固定在所述上下料机器人上的第二视觉定位系统。所述的工装上开设有若干个晶元片槽,所述上下料机器人的末端安装有用于将晶元片槽内的晶元片抓取至所述篮具内或将所述篮具内的晶元片抓取至所述晶元片槽内的抓取组件。
6.进一步地,所述的抓取组件包括固定在所述上下料机器人末端的连接块、固定在所述连接块一侧的吸盘连接柱、固定在所述连接块另一侧的气管接头、安装在所述吸盘连接柱上并与所述气管接头相连通的吸盘延长管以及设在所述吸盘延长管末端并用于吸附抓取晶元片的吸盘。所述晶元片的一侧具有切角,所述吸盘的末端设有用于从晶元片切角处插入并翘起晶元片的尖形块。
7.优选地,为了更好地提高稳定性,所述上下料机器人的末端安装有多维压力传感器,所述的连接块固定在所述多维压力传感器底部。
8.其中,所述晶元片的形状为圆形,所述的切角为扇形切角。
9.优选地,为了更好地实现工装的定位,所述工装输送机构的侧边固定安装有一至多个用于定位所述工装的传感器。
10.优选地,为了确保取片时的稳定性,所述工装输送机构的侧边固定安装有用于在所述工装运行到位时对其进行侧顶推紧的一至多个气缸。
11.进一步地,所述的上下料机器人为六轴工业机器人。
12.进一步地,所述的工装输送机构为皮带输送机,所述的皮带输送机通过若干支撑
板架设在所述工作台上方。
13.进一步地,所述机架的两侧在所述工装输送机构相对应的位置上分别开设有工装上料口和工装下料口。
14.进一步地,所述机架的外侧上部安装有显示器和若干操作按钮。
15.本实用新型具有如下有益效果:提供一种基于机器人的晶元片上下料机,该上下料机能够代替人工实现晶元片的自动上下料,降低人工成本,提升稳定性和良率,降低产品报废率。本实用新型采用机器人实现晶元片的自动上下料,结构简单紧凑,柔性高,可适用于同种类的所有产品。
附图说明
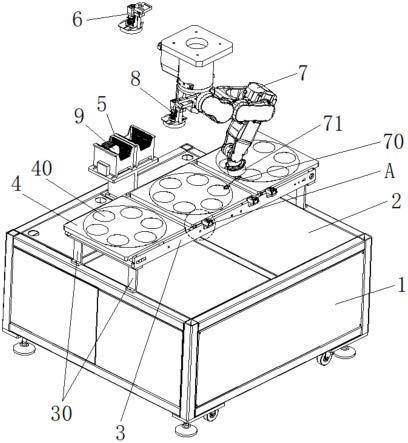
16.图1为本实用新型的立体结构示意图。
17.图2为图1隐去上部机架后的结构示意图。
18.图3为图2中a部分的局部放大示意图。
19.图4为抓取组件的立体结构示意图。
20.图5为晶元片的结构示意图。
21.主要组件符号说明:1、机架;11、工装上料口;12、工装下料口;13、显示器;14、操作按钮;2、工作台;3、工装输送机构;30、支撑板;31、传感器;32、气缸;4、工装;40、晶元片槽;5、篮具;6、第一视觉定位系统;7、上下料机器人;70、抓取组件;701、连接块;702、吸盘连接柱;703、气管接头;704、吸盘延长管;705、吸盘;706、尖形块;71、多维力传感器;8、第二视觉定位系统;9、晶元片。
具体实施方式
22.下面结合附图和具体实施方式,对本实用新型做进一步说明。
23.如图1-5所示,一种基于机器人的晶元片上下料机,包括机架1、固定在机架1内部的工作台2、设在工作台2上方的工装输送机构3、放置在工装输送机构3上的若干工装4、设在工装输送机构3侧边的篮具5、设在篮具5正上方的第一视觉定位系统6、固定在机架1顶部的上下料机器人7以及固定在上下料机器人7上的第二视觉定位系统8。工装4上开设有若干个晶元片槽40,上下料机器人7的末端安装有用于将晶元片槽40内的晶元片9抓取至篮具5内或将篮具5内的晶元片9抓取至晶元片槽40内的抓取组件70。上下料机器人7为六轴工业机器人。
24.抓取组件70包括固定在上下料机器人7末端的连接块701、固定在连接块701一侧的吸盘连接柱702、固定在连接块701另一侧的气管接头703、安装在吸盘连接柱702上并与气管接头703相连通的吸盘延长管704以及设在吸盘延长管704末端并用于吸附抓取晶元片9的吸盘705,气管接头703外接真空发生装置。晶元片9的一侧具有切角,吸盘705的末端设有用于从晶元片9切角处插入并翘起晶元片9的尖形块706。
25.优选地,上下料机器人7的末端安装有多维压力传感器71,连接块701固定在多维压力传感器71底部。晶元片9的形状为圆形,切角为扇形切角。
26.优选地,工装输送机构3的侧边固定安装有一至多个用于定位工装4的传感器31。优选地,工装输送机构3侧边固定安装有用于在工装4运行到位时对其进行侧顶推紧的一至
多个气缸32。工装输送机构3为皮带输送机,皮带输送机通过若干支撑板30架设在工作台上。
27.机架1的两侧在工装输送机构3相对应的位置上分别开设有工装上料口11和工装下料口12。机架1的外侧上部安装有显示器13和若干操作按钮14。
28.本实用新型的工作原理为:晶元片9放置在圆盘工装4的晶元片槽40内,圆盘工装4经过工装输送机构3输送到取片工位;圆盘工装4到位时由传感器31确认位置,并由气缸32侧顶推紧工装,确保取片时的稳定性;圆形晶元片9有一个切脚,第二视觉系统8对圆盘上六片晶元片9分别进行切脚定位;第一视觉系统6对篮具5进行定位并检测篮具5内放片情况,避免重复放置而破片;上下料机器人7第六轴上固定多维力传感器71,多维力传感器71前端固定抓取组件70;取片时,抓取组件70尖形块706从晶元片9切脚处插入,轻轻翘起晶元片9,再通过真空吸取晶元片9;上下料机器人7把取出的晶元片9按照顺畅插入到篮具5内;该设备也可以实现从篮具5内取出晶元片9放置到下一个加工工序的工装平面上。
29.尽管结合优选实施方案具体展示和介绍了本实用新型,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本实用新型的精神和范围内,在形式上和细节上对本实用新型做出各种变化,均为本实用新型的保护范围。
技术特征:
1.一种基于机器人的晶元片上下料机,其特征在于:包括机架、固定在所述机架内部的工作台、设在所述工作台上方的工装输送机构、放置在所述工装输送机构上的若干工装、设在所述工装输送机构侧边的篮具、设在所述篮具正上方的第一视觉定位系统、固定在所述机架顶部的上下料机器人以及固定在所述上下料机器人上的第二视觉定位系统,所述的工装上开设有若干个晶元片槽,所述上下料机器人的末端安装有用于将晶元片槽内的晶元片抓取至所述篮具内或将所述篮具内的晶元片抓取至所述晶元片槽内的抓取组件。2.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述的抓取组件包括固定在所述上下料机器人末端的连接块、固定在所述连接块一侧的吸盘连接柱、固定在所述连接块另一侧的气管接头、安装在所述吸盘连接柱上并与所述气管接头相连通的吸盘延长管以及设在所述吸盘延长管末端并用于吸附抓取晶元片的吸盘,所述晶元片的一侧具有切角,所述吸盘的末端设有用于从晶元片切角处插入并翘起晶元片的尖形块。3.如权利要求2所述的一种基于机器人的晶元片上下料机,其特征在于:所述上下料机器人的末端安装有多维压力传感器,所述的连接块固定在所述多维压力传感器底部。4.如权利要求2所述的一种基于机器人的晶元片上下料机,其特征在于:所述晶元片的形状为圆形,所述的切角为扇形切角。5.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述输送机构的侧边固定安装有一至多个用于定位所述工装的传感器。6.如权利要求5所述的一种基于机器人的晶元片上下料机,其特征在于:所述工装输送机构的侧边固定安装有用于在所述工装运行到位时对其进行侧顶推紧的一至多个气缸。7.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述的上下料机器人为六轴工业机器人。8.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述的工装输送机构为皮带输送机,所述的皮带输送机通过若干支撑板架设在所述工作台上方。9.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述机架的两侧在所述工装输送机构相对应的位置上分别开设有工装上料口和工装下料口。10.如权利要求1所述的一种基于机器人的晶元片上下料机,其特征在于:所述机架的外侧上部安装有显示器和若干操作按钮。
技术总结
本实用新型公开了一种基于机器人的晶元片上下料机,包括机架、固定在所述机架内部的工作台、设在所述工作台上方的工装输送机构、放置在所述工装输送机构上的若干工装、设在所述工装输送机构侧边的篮具、设在所述篮具正上方的第一视觉定位系统、固定在所述机架顶部的上下料机器人以及固定在所述上下料机器人上的第二视觉定位系统;所述的工装上开设有若干个晶元片槽,所述上下料机器人的末端安装有用于将晶元片槽内的晶元片抓取至所述篮具内或将所述篮具内的晶元片抓取至所述晶元片槽内的抓取组件。本实用新型能够代替人工实现晶元片的自动上下料,降低人工成本,提升稳定性和良率,降低产品报废率。降低产品报废率。降低产品报废率。
技术研发人员:杜进团 赖雄华 饶富林
受保护的技术使用者:厦门控智电子科技有限公司
技术研发日:2022.07.15
技术公布日:2022/10/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1