一种铝模板转运装置的制作方法
1.本实用新型涉及铝模板生产领域,尤其涉及一种铝模板转运装置。
背景技术:
2.铝合金模板全称为混凝土工程铝合金模板,是一种常见的建筑材料,其在制作成型之后,为了便于销售以及运输,会对其外表进行绕包包一层塑料纸做保护作用;而生产出来之后需要通过传输转运到绕包区进行打包,而两种不同类型的传输装置之间需要进行转运,不然出现翻转偏移会影响绕包美观度;而目前的转运多为人力搬运或者叉车转运,采用人力转运的话需要消耗大量人力,而采用叉车则还是需要人工对齐,因此耗费人力物力的同时效率也较低。
技术实现要素:
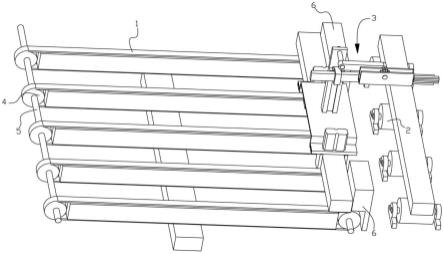
3.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种铝模板转运装置,包括成品传输带1、抓取机械臂3以及传输辊2;所述成品传输带并排设置有多组,每组传输带两端的传动轮4均通过一个转轴5串联,所述转轴一侧与传输电机连接;所述传输带的传输末端一侧设置有水平传输方向与其垂直的传输辊,所述传输辊与传输带之间设置有可以来回抓取放下的抓取机械臂。
4.所述传输带的末端设置有物料定位挡板6。
5.所述抓取机械臂包括气动手指31以及与气动手指连接的夹爪32、连接臂33、转动臂34;所述气动手指一侧连接有竖直设置的连接臂33,所述连接臂33上端一侧设置有水平连接杆35,所述转动臂一端可以相对转动的插设在水平连接杆上,所述转动臂的另一端通过动力装置带动其摆动。
6.所述动力装置包括齿轮7、u形支撑槽9、齿条8以及推动气缸10;所述齿轮设只在u形支撑槽内,其转轴两端可以转动的穿过u形支撑槽两侧侧壁,靠所述转动臂一侧的转轴与转动臂固定连接;所述齿轮下侧的u形支撑槽底部设置有可以来回运动的齿条,所述齿条和齿轮啮合,所述齿条一侧与推动气缸连接,通过推动气缸带动齿轮转动,从而带动气动手指来回夹取方向铝模板。
7.所述气动手指设置有两组,其中间通过连接板连接,所述连接臂通过螺栓竖直设置在连接板11正上方。
8.所述连接臂上设置有稳定性辅助装置,所述稳定性辅助装置包括竖槽12、滑块13以及水平滑轨14;所述连接臂上竖直设置有竖槽,所述竖槽内设置有可以上下滑动的滑块,所述滑块一侧设置有滑孔,所述水平滑轨穿过滑孔。
9.本实用新型的有益效果在于:
10.本装置能够通过一个气缸实现抓取机械臂水平方向和竖直方向的运动转运,整个过程连接臂始终保持竖直,使得物料抬起以及放下都能不改变角度平稳运行。
附图说明
11.下面结合附图和实施案例对本实用新型做进一步的说明。
12.图1为本实用新型的结构示意图;
13.图2为抓取机械臂放大视图;
14.图3为部分剖视图。
具体实施方式
15.下面结合附图和实施例对本实用新型进一步说明:
16.参见图1-3。
17.为了能够针对现有技术的转运效率较低,本实用新型公开了一种铝模板转运装置,包括成品传输带1、抓取机械臂3以及传输辊2;所述成品传输带并排设置有多组,每组传输带两端的传动轮4均通过一个转轴5串联,所述转轴一侧与传输电机连接;所述传输带的传输末端一侧设置有水平传输方向与其垂直的传输辊,所述传输辊与传输带之间设置有可以来回抓取放下的抓取机械臂。
18.为了能够使得物料传输到传输带1时,可以对物料进行定位从而给予抓取机械臂3一个平稳抓取的位置,所述传输带的末端设置有物料定位挡板6。
19.所述抓取机械臂包括气动手指31以及与气动手指连接的夹爪32、连接臂33、转动臂34;所述气动手指一侧连接有竖直设置的连接臂33,所述连接臂33上端一侧设置有水平连接杆35,所述转动臂一端可以相对转动的插设在水平连接杆上,所述转动臂的另一端通过动力装置带动其摆动。
20.所述动力装置包括齿轮7、u形支撑槽9、齿条8以及推动气缸10;所述齿轮设只在u形支撑槽内,其转轴两端可以转动的穿过u形支撑槽两侧侧壁,靠所述转动臂一侧的转轴与转动臂固定连接;所述齿轮下侧的u形支撑槽底部设置有可以来回运动的齿条,所述齿条和齿轮啮合,所述齿条一侧与推动气缸连接,通过推动气缸带动齿轮转动,从而带动气动手指来回夹取方向铝模板。如图3的剖视图可知,推动气缸10推动齿条8向前运动时,齿轮7转动,带动转动臂34向推动气缸10一侧上方转动,而转动臂34抬起移动时带动连接臂33抬起转运,整个过程连接臂33始终保持竖直,使得物料抬起以及放下都能不改变角度平稳运行;
21.所述气动手指设置有两组,其中间通过连接板连接,所述连接臂通过螺栓竖直设置在连接板11正上方。
22.为了防止在本装置多次运作下出现横向偏移,所述连接臂上设置有稳定性辅助装置,所述稳定性辅助装置包括竖槽12、滑块13以及水平滑轨14;所述连接臂上竖直设置有竖槽,所述竖槽内设置有可以上下滑动的滑块,所述滑块一侧设置有滑孔,所述水平滑轨穿过滑孔。当连接臂33向上方右侧抬起时,x轴向的滑块13和y轴向的竖槽12会跟着运动,而z向受到限位,使得装置能够多次平稳的运行。
23.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
技术特征:
1.一种铝模板转运装置,其特征在于:包括成品传输带(1)、抓取机械臂(3)以及传输辊(2);所述成品传输带并排设置有多组,每组传输带两端的传动轮(4)均通过一个转轴(5)串联,所述转轴一侧与传输电机连接;所述传输带的传输末端一侧设置有水平传输方向与其垂直的传输辊,所述传输辊与传输带之间设置有可以来回抓取放下的抓取机械臂。2.根据权利要求1所述的一种铝模板转运装置,其特征在于:所述传输带的末端设置有物料定位挡板(6)。3.根据权利要求1所述的一种铝模板转运装置,其特征在于:所述抓取机械臂包括气动手指(31)以及与气动手指连接的夹爪(32)、连接臂(33)、转动臂(34);所述气动手指一侧连接有竖直设置的连接臂(33),所述连接臂(33)上端一侧设置有水平连接杆(35),所述转动臂一端可以相对转动的插设在水平连接杆上,所述转动臂的另一端通过动力装置带动其摆动。4.根据权利要求3所述的一种铝模板转运装置,其特征在于:所述动力装置包括齿轮(7)、u形支撑槽(9)、齿条(8)以及推动气缸(10);所述齿轮设只在u形支撑槽内,其转轴两端可以转动的穿过u形支撑槽两侧侧壁,靠所述转动臂一侧的转轴与转动臂固定连接;所述齿轮下侧的u形支撑槽底部设置有可以来回运动的齿条,所述齿条和齿轮啮合,所述齿条一侧与推动气缸连接,通过推动气缸带动齿轮转动,从而带动气动手指来回夹取方向铝模板。5.根据权利要求3所述的一种铝模板转运装置,其特征在于:所述气动手指设置有两组,其中间通过连接板连接,所述连接臂通过螺栓竖直设置在连接板(11)正上方。6.根据权利要求4所述的一种铝模板转运装置,其特征在于:所述连接臂上设置有稳定性辅助装置,所述稳定性辅助装置包括竖槽(12)、滑块(13)以及水平滑轨(14);所述连接臂上竖直设置有竖槽,所述竖槽内设置有可以上下滑动的滑块,所述滑块一侧设置有滑孔,所述水平滑轨穿过滑孔。
技术总结
本实用新型涉及铝模板生产领域,尤其涉及一种铝模板转运装置。包括成品传输带、抓取机械臂以及传输辊;所述成品传输带并排设置有多组,每组传输带两端的传动轮均通过一个转轴串联,所述转轴一侧与传输电机连接;所述传输带的传输末端一侧设置有水平传输方向与其垂直的传输辊,所述传输辊与传输带之间设置有可以来回抓取放下的抓取机械臂。本装置能够通过一个气缸实现抓取机械臂水平方向和竖直方向的运动转运,整个过程连接臂始终保持竖直,使得物料抬起以及放下都能不改变角度平稳运行。物料抬起以及放下都能不改变角度平稳运行。物料抬起以及放下都能不改变角度平稳运行。
技术研发人员:陈雪波 聂家兵
受保护的技术使用者:江西博澳铝模科技有限公司
技术研发日:2022.08.11
技术公布日:2023/1/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1