一种机器人装夹装置的制作方法
1.本实用新型涉及机器人技术领域,具体的为一种机器人装夹装置。
背景技术:
2.半导体封装拆分了各个工艺,每道工艺之间相互独立,作为半导体制造中重要原材料,物料片在每道工艺之间的过渡需要有设备来实现运输,引线框架作为半导体封装工艺的运输物料的载体,需将其放置在铝料盒和引线框架盒中进行搬运,而现有情况一般由人推物料小车形式对铝料盒和引线框架盒进行搬运,效率较低,容易出错。
技术实现要素:
3.发明目的:针对上述现有技术,提出一种机器人装夹装置。
4.一种机器人装夹装置,包括机械臂,所述机械臂的一侧设有转接件,所述转接件的一侧设有驱动机构,所述驱动机构的输出端连接有夹爪组件:
5.所述夹爪组件连接于把手,所述把手设于铝料盒上;
6.所述夹爪组件连接于引线框架盒的两侧。
7.优选的,所述夹爪组件包括两个夹爪,两个所述夹爪对称设于所述驱动机构的输出端,两个所述夹爪均包括第一基板、第二基板和第三基板,所述第一基板位于空间坐标系的x轴,所述第二基板和第三基板分别位于空间坐标系的y轴和z轴,其中,所述第一基板连接于所述驱动机构的输出端;
8.所述第二基板上开设有第一卡槽,所述第一卡槽内设有弹性件,所述弹性件贴合连接所述引线框架盒的两侧;
9.所述第三基板上开设有第二卡槽,所述第二卡槽贴合连接于所述把手。
10.优选的,所述把手包括水平部和垂直部,所述水平部的两端对称设有卡块,所述卡块包括第一上倾斜部和第一下倾斜部,所述第二卡槽包括第二上倾斜部和第二下倾斜部,所述第一上倾斜部和所述第二上倾斜部贴合连接,所述第一下倾斜部和所述第二下倾斜部贴合连接。
11.优选的,所述第二上倾斜部和水平线的夹角为25
°‑
35
°
,所述第二下倾斜部和水平线的夹角为55
°‑
65
°
。
12.优选的,所述垂直部末端连接有方型凸台,所述铝料盒的上方开设有方型槽,所述方型凸台滑动连接于所述方型槽。
13.优选的,所述驱动机构的驱动方式为电动或者气动。
14.优选的,所述驱动机构内置力矩传感器,所述力矩传感器对两个所述夹爪的夹持作用力进行检测。
15.有益效果:
16.1)本实用新型通过倾斜部的引导,促使第二卡槽进入把手的倾斜部以托举铝料盒;
17.2)本实用新型通过在第一卡槽内设置弹性件,对引线框架盒进行夹取;
18.3)本实用新型能够夹取不同尺寸的铝料盒和引线框架盒,扩大了机械设备的适用范围,提高了机械臂抓取效率。
附图说明
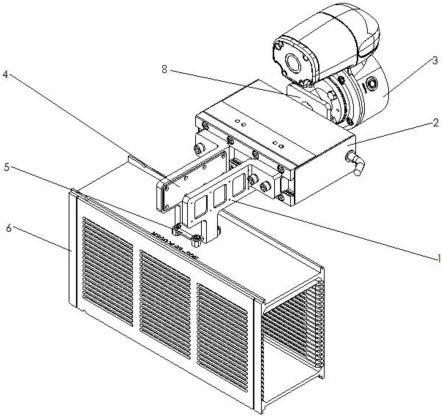
19.图1是本实用新型的整体结构示意图;
20.图2是本实用新型夹取引线框架盒结构示意图;
21.图3是本实用新型的正视结构示意图;
22.图4是本实用新型第二卡槽处局部放大示意图。
23.图中:机械臂3、转接件8、驱动机构2、把手5、铝料盒6、引线框架盒7、夹爪1、第一卡槽11、弹性件4、第二卡槽12、第一上倾斜部500、第一下倾斜部501、第二上倾斜部100、第二下倾斜部101、方型凸台51、方型槽61。
具体实施方式
24.下面结合附图对本发明做更进一步的解释。
25.一种机器人装夹装置,包括机械臂3,所述机械臂3的一侧设有转接件8,所述转接件8的一侧设有驱动机构2,所述驱动机构2的输出端连接有夹爪组件:
26.所述夹爪组件连接于把手5,所述把手5设于铝料盒6上;
27.所述夹爪组件连接于引线框架盒7的两侧。
28.所述夹爪组件包括两个夹爪1,两个所述夹爪1对称设于所述驱动机构2的输出端,两个所述夹爪1均包括第一基板、第二基板和第三基板,所述第一基板位于空间坐标系的x轴,所述第二基板和第三基板分别位于空间坐标系的y轴和z轴,其中,所述第一基板连接于所述驱动机构2的输出端;
29.所述第二基板上开设有第一卡槽11,所述第一卡槽11内设有弹性件4,所述弹性件4贴合连接所述引线框架盒7的两侧;
30.所述第三基板上开设有第二卡槽12,所述第二卡槽12贴合连接于所述把手5。
31.所述把手5包括水平部和垂直部,所述水平部的两端对称设有卡块,所述卡块包括第一上倾斜部500和第一下倾斜部501,所述第二卡槽12包括第二上倾斜部100和第二下倾斜部101,所述第一上倾斜部500和所述第二上倾斜部100贴合连接,所述第一下倾斜部501和所述第二下倾斜部101贴合连接。
32.所述的垂直部末端连接有方型凸台51,所述铝料盒6的上方开设有方型槽61,所述方型凸台51滑动连接于所述方型槽61。
33.所述驱动机构2的驱动方式为电动或者气动。
34.所述驱动机构2内置力矩传感器,所述力矩传感器对两个所述夹爪1的夹持作用力进行检测。
35.操作原理:
36.1)夹取铝料盒6:如图1所示,首先,启动驱动机构2,所述驱动机构2的输出端连接于第一基板(位于空间坐标系的x轴),带动第一基板左右移动,从而带动第三基板(位于空间坐标系的z轴)左右移动,第三基板上设置的第二卡槽12和把手5水平部两端对称设有的
卡块接触连接,在横向夹持力作用下,第一上倾斜部500和第二上倾斜部100贴合连接,第一下倾斜部501和第二下倾斜部101贴合连接,卡块和第二卡槽12卡和连接,把手5的垂直部末端插入到铝料盒6上方设置的方型槽61内,水平部直接通过螺栓连接在铝料盒6上方;在固定好之后即可对铝料盒6进行移动。
37.2)夹取引线框架盒7:如图2所示,同样的,启动驱动机构2,所述驱动机构2的输出端所述连接于第一基板(位于空间坐标系的x轴),带动第一基板左右移动,从而带动第二基板(位于空间坐标系的y轴)左右移动,第二基板上开设有第一卡槽11,所述第一卡槽11内设有弹性件4,所述弹性件4贴合连接所述引线框架盒7的两侧,这样通过弹性件4对引线框架盒7进行夹持;在固定好之后即可对引线框架盒7进行移动。
38.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种机器人装夹装置,其特征在于,包括机械臂(3),所述机械臂(3)的一侧设有转接件(8),所述转接件(8)的一侧设有驱动机构(2),所述驱动机构(2)的输出端连接有夹爪组件:所述夹爪组件连接于把手(5),所述把手(5)设于铝料盒(6)上;所述夹爪组件连接于引线框架盒(7)的两侧。2.如权利要求1所述的一种机器人装夹装置,其特征在于,所述夹爪组件包括两个夹爪(1),两个所述夹爪(1)对称设于所述驱动机构(2)的输出端,两个所述夹爪(1)均包括第一基板、第二基板和第三基板,所述第一基板、第二基板和第三基板依次串接,所述第一基板、所述第二基板和第三基板分别位于空间坐标系的x轴、y轴和z轴,其中,所述第一基板连接于所述驱动机构(2)的输出端;所述第二基板上开设有第一卡槽(11),所述第一卡槽(11)内设有弹性件(4),所述弹性件(4)贴合连接所述引线框架盒(7)的两侧;所述第三基板上开设有第二卡槽(12),所述第二卡槽(12)贴合连接于所述把手(5)。3.如权利要求2所述的一种机器人装夹装置,其特征在于,所述把手(5)包括水平部和垂直部,所述水平部螺栓连接于所述铝料盒(6)上方,所述水平部的两端对称设有卡块,所述卡块包括第一上倾斜部(500)和第一下倾斜部(501),所述第二卡槽(12)包括第二上倾斜部(100)和第二下倾斜部(101),所述第一上倾斜部(500)和所述第二上倾斜部(100)贴合连接,所述第一下倾斜部(501)和所述第二下倾斜部(101)贴合连接。4.如权利要求3所述的一种机器人装夹装置,其特征在于,所述垂直部末端连接有方型凸台(51),所述铝料盒(6)的上方开设有方型槽(61),所述方型凸台(51)滑动连接于所述方型槽(61)。5.如权利要求1所述的一种机器人装夹装置,其特征在于,所述驱动机构(2)的驱动方式为电动或者气动。6.如权利要求1所述的一种机器人装夹装置,其特征在于,所述驱动机构(2)内置力矩传感器,所述力矩传感器对两个所述夹爪(1)的夹持作用力进行检测。
技术总结
本实用新型公开了一种机器人装夹装置,包括机械臂,所述机械臂的一侧设有转接件,所述转接件的一侧设有驱动机构,所述驱动机构的输出端连接有夹爪组件:所述夹爪组件连接于把手,所述把手设于铝料盒上;所述夹爪组件连接于引线框架盒的两侧。本实用新型能够夹取不同尺寸的铝料盒和引线框架盒,扩大了机械设备的适用范围,提高了机械臂抓取效率。提高了机械臂抓取效率。提高了机械臂抓取效率。
技术研发人员:吴琦
受保护的技术使用者:亿嘉和科技股份有限公司
技术研发日:2022.08.30
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1