无货架龙门捡选仓库的升降抓取机构的制作方法
本技术涉及货物运输,具体涉及无货架龙门捡选仓库的升降抓取机构。
背景技术:
1、在工厂中,由于制作工序众多,不同工序也需要不同的货物,因此货物在工厂中常常需要进行运输,而一般在的货物存放时,都是存放在货架上,然后在货架之间设置巷道机,利用巷道机进行货物的移动和搬运,此种方式则空间利用率更低,更是需要多个货架进行存放货物,仓储成本更高;更有较为落后的工厂则是完全采用人工进行搬运,这样所需人工成本更高,货物运输的效率也更低;
2、而由于货物是叠放的,因此在货物搬运时就需要进行升降,以抓取不同高度的货物,升降抓取机构是抓取货物的主要结构,因此升降抓取机构的准确性及稳定性就比较重要,现有的一些升降抓取机构在升降过程中容易发生位置偏离或识别不够准确,结构不够稳定,导致货物抓取时需要消耗更多的时间,因此,稳定、位置识别准确的升降抓取机构能够更加提高货物的运输效率。
3、有鉴于此,本实用新型针对上述过程中未臻完善所导致的诸多缺失及不便,而深入构思,且积极研究改良试做而开发设计出本实用新型。
技术实现思路
1、本实用新型的目的在于针对现有技术的缺陷和不足,提供一种结构更稳定,位置识别更精确,不易发生偏离的无货架龙门捡选仓库的升降抓取机构。
2、为实现上述目的,本实用新型采用以下技术方案是:
3、无货架龙门捡选仓库的升降抓取机构,其包括
4、升降机构,所述升降机构包括驱动装置、主支撑架及副支撑架,所述副支撑架固定在主支撑架上,主支撑架与副支撑架呈阶梯状,所述驱动装置固定在主支撑架上;
5、抓取机构,所述抓取机构包括主支架、滑动件、推动气缸、夹爪件及吊钩,所述主支架底部的两侧皆设置有滑动件,两滑动件上皆设置有夹爪件,夹爪件与推动气缸连接,所述吊钩分散在所述主支架上,所述吊钩与所述驱动装置连接;
6、定位机构,所述定位机构包括定位套、定位轴及深度相机,所述定位套固定在所述副支撑架上,所述定位轴及深度相机皆固定在所述主支架上,所述定位轴可活动的套设在所述定位套内,所述深度相机用于对货物进行高度与位置的识别。
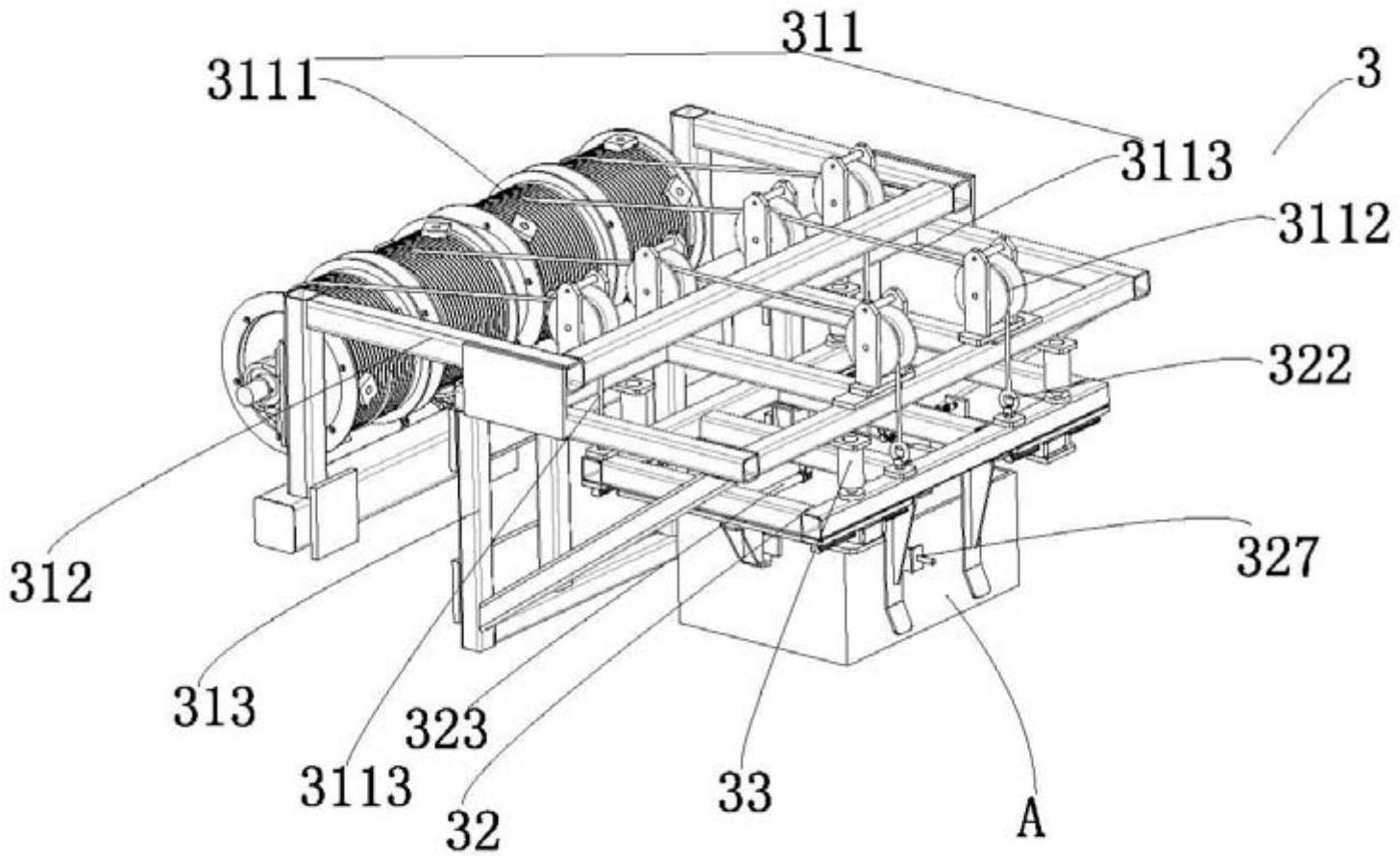
7、进一步,所述驱动装置包括多个卷筒、多个导向轮、多根钢丝绳、第三电机、链条、第一链轮及第二链轮,所述多个卷筒固定在一根传动轴上,传动轴固定在主支撑架上,传动轴上设置有第二链轮,所述第三电机固定在主支撑架上,第三电机驱动连接第一链轮,第一链轮与第二链轮通过链条连接,副支撑架固定在主支撑架上,多个导向轮分散固定在副支撑架上,多根钢丝绳的一端分别缠绕在多个卷筒上,多根钢丝绳的另一端对应缠绕在多个导向轮上。
8、进一步,所述多根钢丝绳的另一端对应连接在所述吊钩上。
9、进一步,所述滑动件包括滑轨及滑块,所述滑轨设置在所述主支架底部的两侧,所述滑块可滑动的设置在滑轨上。
10、进一步,所述夹爪件包括挂钩及固定板,所述挂钩固定在固定板上,所述固定板设置在滑块上,推动气缸的一端固定在两固定板上,推动气缸的另一端固定在主支架上。
11、进一步,所述抓取机构还包括导向板,所述导向板设置在所述主支架底部的两侧。
12、进一步,还包括传感器,所述传感器设置在所述导向板上。
13、采用上述技术方案后,本实用新型设置有定位机构,通过定位机构的定位轴和定位套的配合,使得抓取机构在下降后又再次上升时,通过将定位轴套入定位套内,能够实现对抓取机构与升降机构之间的定位,能够避免抓取机构在升降过程中以及后续的在其他方向上移动时,发生位置的偏离;通过设置深度相机,可以对料框进行位置和高度的识别,位置识别更加精确;能够更快速、更准确的抓取并移动货物,能够节约更多的时间,结构更稳定,更加提高了货物的运输效率。
技术特征:
1.无货架龙门捡选仓库的升降抓取机构,其特征在于:其包括
2.根据权利要求1所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:所述驱动装置包括多个卷筒、多个导向轮、多根钢丝绳、第三电机、链条、第一链轮及第二链轮,所述多个卷筒固定在一根传动轴上,传动轴固定在主支撑架上,传动轴上设置有第二链轮,所述第三电机固定在主支撑架上,第三电机驱动连接第一链轮,第一链轮与第二链轮通过链条连接,副支撑架固定在主支撑架上,多个导向轮分散固定在副支撑架上,多根钢丝绳的一端分别缠绕在多个卷筒上,多根钢丝绳的另一端对应缠绕在多个导向轮上。
3.根据权利要求2所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:所述多根钢丝绳的另一端对应连接在所述吊钩上。
4.根据权利要求2所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:所述滑动件包括滑轨及滑块,所述滑轨设置在所述主支架底部的两侧,所述滑块可滑动的设置在滑轨上。
5.根据权利要求4所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:所述夹爪件包括挂钩及固定板,所述挂钩固定在固定板上,所述固定板设置在滑块上,推动气缸的一端固定在两固定板上,推动气缸的另一端固定在主支架上。
6.根据权利要求1所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:所述抓取机构还包括导向板,所述导向板设置在所述主支架底部的两侧。
7.根据权利要求6所述的无货架龙门捡选仓库的升降抓取机构,其特征在于:还包括传感器,所述传感器设置在所述导向板上。
技术总结
本技术公开了无货架龙门捡选仓库的升降抓取机构,它涉及货物运输技术领域,其包括升降机构,所述升降机构包括驱动装置、主支撑架及副支撑架,所述副支撑架固定在主支撑架上,主支撑架与副支撑架呈阶梯状,所述驱动装置固定在主支撑架上;抓取机构,所述抓取机构包括主支架、滑动件、推动气缸、夹爪件及吊钩,所述主支架底部的两侧皆设置有滑动件,两滑动件上皆设置有夹爪件,夹爪件与推动气缸连接,所述吊钩分散在所述主支架上,所述吊钩与所述驱动装置连接;定位机构采用上述技术方案后,本技术结构更稳定,位置识别更精确,不易发生偏离。
技术研发人员:朱扬华,蔡跃祥,谢洪喜,王永忠,陈文鹏,高炳程,李振果
受保护的技术使用者:厦门宏泰智能制造有限公司
技术研发日:20220923
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!