包装码垛夹具的制作方法
本技术涉及一种夹具,特别是涉及一种机械式玻璃条料包装码垛夹具。
背景技术:
1、目前,光学玻璃条料包装基本实现自动化,在条料玻璃包装完成后需要通过机器人进行码垛,机器人通过真空吸盘将产品吸附的方式进行码垛,但是由于包装箱不平整及打包带的影响,在机器人搬运码垛过程中产品经常从真空吸盘上掉落,造成产品损坏甚至报废。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种可防止机器人码垛搬运过程中产品突然脱落的包装码垛夹具。
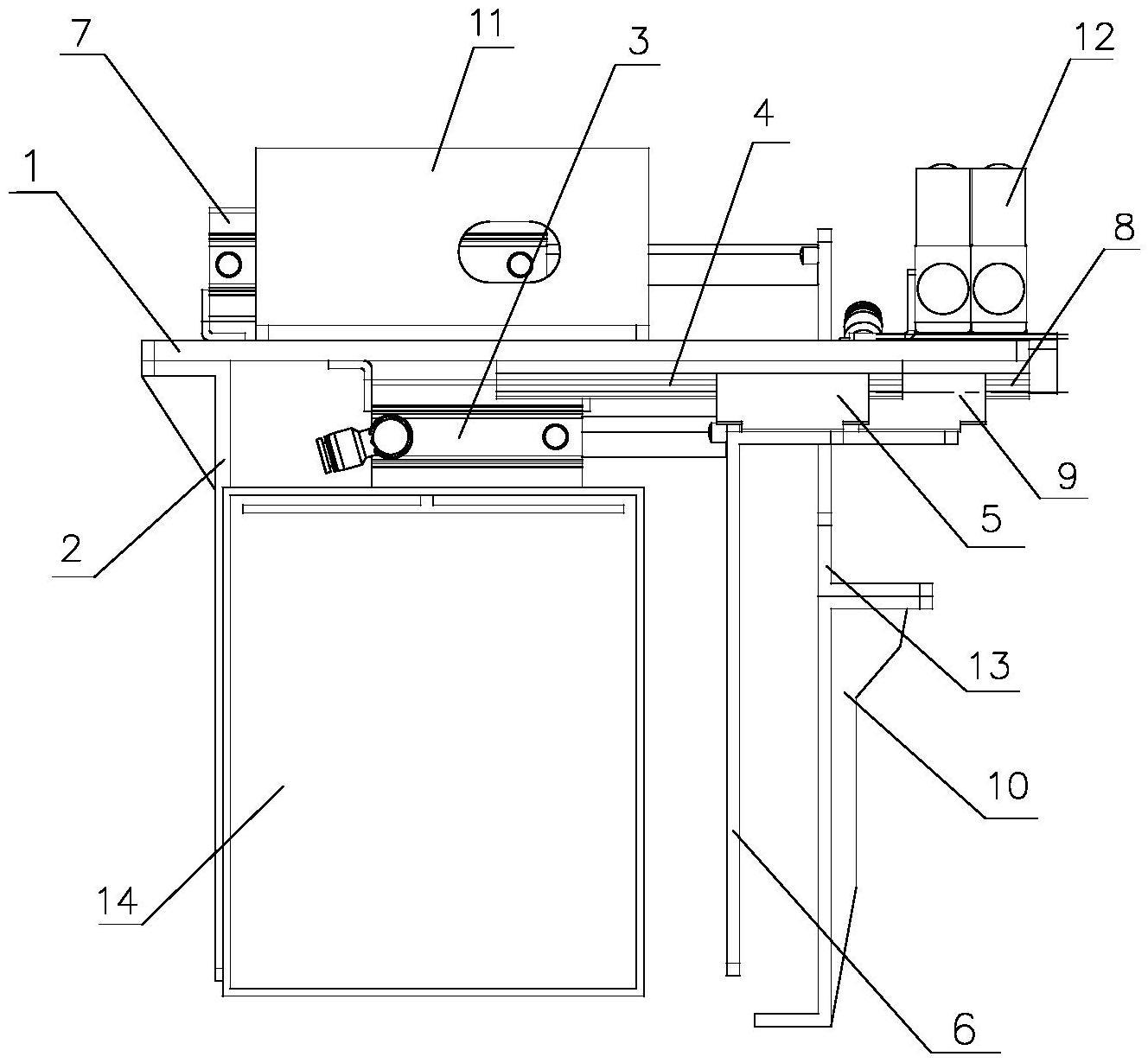
2、本实用新型解决技术问题所采用的技术方案是:包装码垛夹具,包括安装板、固定板、夹板移动气缸、夹板直线导轨、夹板滑块、夹板、锁箱板移动气缸、锁箱板直线导轨、锁箱板滑块、锁箱板、机器人连接板和电磁阀,所述固定板安装在安装板的下表面上;所述夹板直线导轨安装在安装板的下表面,所述夹板滑块设置在夹板直线导轨上,所述夹板与夹板滑块连接,所述夹板移动气缸安装在安装板上,所述夹板滑块与夹板移动气缸连接,所述电磁阀控制夹板移动气缸伸缩运动,带动夹板滑块在夹板直线导轨上左右移动;所述锁箱板直线导轨安装在安装板的下表面,所述锁箱板滑块设置在锁箱板直线导轨上,所述锁箱板与锁箱板滑块连接,所述锁箱板移动气缸安装在安装板上,所述锁箱板滑块与锁箱板移动气缸连接,所述电磁阀控制锁箱板移动气缸伸缩运动,带动锁箱板滑块在锁箱板直线导轨上左右移动;所述机器人连接板安装在安装板上。
3、进一步的,所述固定板为l型工件,l型工件的短边与安装板连接,l型工件的长边为固定板的工作面。所述夹板为l型工件,l型工件的短边与夹板滑块连接,l型工件的长边为夹板的工作面。
4、进一步的,所述夹板直线导轨和夹板滑块各设置一对且相互平行,l型的夹板的短边的两端分别与一对夹板滑块连接。所述夹板直线导轨与锁箱板直线导轨平行。
5、进一步的,所述锁箱板通过锁箱板连接块与锁箱板滑块连接,所述锁箱板连接块与锁箱板滑块连接,所述锁箱板与锁箱板连接块连接。所述锁箱板为z型工件,其上面短边与锁箱板连接块连接,下面短边与长边为工作面。
6、进一步的,所述锁箱板为z型工件,其上面短边与锁箱板滑块连接,下面短边与长边为工作面。
7、进一步的,所述夹板的工作面、固定板的工作面以及锁箱板的长边工作面相互平行,且与锁箱板的短边工作面垂直。
8、进一步的,所述机器人连接板为门型工件,用于连接机器人的法兰。
9、本实用新型的有益效果是:与现有真空吸盘夹具相比,本实用新型的机械式包装码垛夹具在码垛过程中不会出现产品脱落问题,码垛能力也从45s/箱提高到20s/箱,不仅杜绝产品报废还提高了工作效率,操作便捷,可广泛应用于各种包装码垛生产线上,具有较高的使用价值,特别是对玻璃条料包装码垛的能力提高显著。
技术特征:
1.包装码垛夹具,其特征在于:包括安装板(1)、固定板(2)、夹板移动气缸(3)、夹板直线导轨(4)、夹板滑块(5)、夹板(6)、锁箱板移动气缸(7)、锁箱板直线导轨(8)、锁箱板滑块(9)、锁箱板(10)、机器人连接板(11)和电磁阀(12),所述固定板(2)安装在安装板(1)的下表面上;所述夹板直线导轨(4)安装在安装板(1)的下表面,所述夹板滑块(5)设置在夹板直线导轨(4)上,所述夹板(6)与夹板滑块(5)连接,所述夹板移动气缸(3)安装在安装板(1)上,所述夹板滑块(5)与夹板移动气缸(3)连接,所述电磁阀(12)控制夹板移动气缸(3)伸缩运动,带动夹板滑块(5)在夹板直线导轨(4)上左右移动;所述锁箱板直线导轨(8)安装在安装板(1)的下表面,所述锁箱板滑块(9)设置在锁箱板直线导轨(8)上,所述锁箱板(10)与锁箱板滑块(9)连接,所述锁箱板移动气缸(7)安装在安装板(1)上,所述锁箱板滑块(9)与锁箱板移动气缸(7)连接,所述电磁阀(12)控制锁箱板移动气缸(7)伸缩运动,带动锁箱板滑块(9)在锁箱板直线导轨(8)上左右移动;所述机器人连接板(11)安装在安装板(1)上。
2.如权利要求1所述的包装码垛夹具,其特征在于:所述固定板(2)为l型工件,l型工件的短边与安装板(1)连接,l型工件的长边为固定板(2)的工作面。
3.如权利要求1所述的包装码垛夹具,其特征在于:所述夹板(6)为l型工件,l型工件的短边与夹板滑块(5)连接,l型工件的长边为夹板(6)的工作面。
4.如权利要求3所述的包装码垛夹具,其特征在于:所述夹板直线导轨(4)和夹板滑块(5)各设置一对且相互平行,l型的夹板(6)的短边的两端分别与一对夹板滑块(5)连接。
5.如权利要求1所述的包装码垛夹具,其特征在于:所述夹板直线导轨(4)与锁箱板直线导轨(8)平行。
6.如权利要求1所述的包装码垛夹具,其特征在于:所述锁箱板(10)通过锁箱板连接块(13)与锁箱板滑块(9)连接,所述锁箱板连接块(13)与锁箱板滑块(9)连接,所述锁箱板(10)与锁箱板连接块(13)连接。
7.如权利要求6所述的包装码垛夹具,其特征在于:所述锁箱板(10)为z型工件,其上面短边与锁箱板连接块(13)连接,下面短边与长边为工作面。
8.如权利要求1所述的包装码垛夹具,其特征在于:所述锁箱板(10)为z型工件,其上面短边与锁箱板滑块(9)连接,下面短边与长边为工作面。
9.如权利要求1所述的包装码垛夹具,其特征在于:所述夹板(6)的工作面、固定板(2)的工作面以及锁箱板(10)的长边工作面相互平行,且与锁箱板(10)的短边工作面垂直。
10.如权利要求1所述的包装码垛夹具,其特征在于:所述机器人连接板(11)为门型工件,用于连接机器人的法兰。
技术总结
本技术提供一种可防止机器人码垛搬运过程中产品突然脱落的包装码垛夹具。包装码垛夹具,固定板安装在安装板的下表面上;夹板直线导轨安装在安装板的下表面,夹板滑块设置在夹板直线导轨上,夹板与夹板滑块连接,夹板移动气缸安装在安装板上,夹板滑块与夹板移动气缸连接,电磁阀控制夹板移动气缸伸缩运动;锁箱板直线导轨安装在安装板的下表面,锁箱板滑块设置在锁箱板直线导轨上,锁箱板与锁箱板滑块连接,锁箱板移动气缸安装在安装板上,锁箱板滑块与锁箱板移动气缸连接,电磁阀控制锁箱板移动气缸伸缩运动;机器人连接板安装在安装板上。本技术的包装码垛夹具在码垛过程中不会出现产品脱落问题,可广泛应用于各种包装码垛生产线上。
技术研发人员:胡功彬,先正良,魏浚,牟未胜,陈方雄,宿德富
受保护的技术使用者:成都光明光电股份有限公司
技术研发日:20220927
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!