一种物流集散中心用大型货物自动叉卸装置的制作方法
1.本实用新型涉及年糕加工技术领域,尤其涉及一种物流集散中心用大型货物自动叉卸装置。
背景技术:
2.目前在物流领域中,将货物从车上卸下是十分繁重的工作,特别是大型货物从车辆上卸下,一般会使用叉车进行卸料,如专利cn109879212b,就公开了一种叉车,但是上述技术在卸料时需要反复工作,才能将车厢内的产品卸下,但是其实在装车过程中,货物都会使用底板作为支撑,方便叉车进行装卸,而目前的叉车由于货叉的长度不足,一次只能完成一组产品的装卸,效率较低。并且目前的叉车都需要人工进行控制,而且需要具备操作叉车技能的工人进行工作,无形中增加了人力成本和知识成本,进而增加了物流工作的总成本。因此,解决物流行业货物卸车工作效率低且需要叉车专业操作人员进行卸料的问题就显得尤为重要了。
技术实现要素:
3.本实用新型的目的是提供一种物流集散中心用大型货物自动叉卸装置,车辆停在停车底板上,并且通过取货平台上的取货叉向车厢内移动,将货物叉起,并通过取货叉的反向移动完成货物卸车工作,并且通过加长的取货叉,对于大型产品或多组同类产品进行一次性卸车,提高工作效率,解决了物流行业货物卸车工作效率低且需要叉车专业操作人员进行卸料的问题。
4.本实用新型提供一种物流集散中心用大型货物自动叉卸装置,包括停车底板,所述停车底板一侧设置有取货平台,所述取货平台上设置有取货叉,所述取货平台上端设置有轨道,取货叉通过移动平台在轨道上移动,所述轨道一旁设置有动力机构,通过动力机构为移动平台提供横向移动的动力,所述移动平台上设置有液压缸,液压缸设置在取货叉和移动平台之间,所述取货平台下端及侧面设置有调位气缸。
5.进一步改进在于:所述动力机构包括链条电机、链条和支撑轮,支撑轮的数量为两个且分别设置在轨道两端,所述链条电机的转轴连接在支撑轮的圆心位置,链条绕过支撑轮形成一个闭环且移动平台连接在链条上层中部。
6.进一步改进在于:所述停车底板一端设置有斜板,车辆通过斜板倒入停车底板上方,所述停车底板上端面设置有压力传感器,通过压力传感器对停车底板上是否停车进行判断。
7.进一步改进在于:所述停车底板一侧设置有操作台,操作台与调位气缸连接,所述取货平台上设置有摄像头,操作台上设置有操作面板和显示器,操作面板与调位气缸的气源通过信号线连接,所述显示器与摄像头通过信号线连接。
8.进一步改进在于:所述取货叉与液压缸之间设置有受力传感器,通过受力传感器对取货叉承受的重量进行检测,并反馈到远程云端服务器。
9.工作原理:货车司机将车辆倒入停在停车底板上,然后将货车车厢打开,根据车厢内的货物位置,按动操作台上的操控按钮,控制几个调位气缸伸出或缩回,对取货叉的位置进行调整,由于是静态调整,因此其难度较低,当取货叉的位置准确后,动力机构中的链条电机开始正转,带动取货平台向车厢方向移动,取货叉插入货物下方的底座插槽中,然后液压缸开始工作,将取货叉连带货物抬起,动力机构中的链条电机开始反转,将货物从车厢内取出,并且结合带有传送带的下料轨道将货物运走,完成自动卸车工作。
10.在货车司机操作操作台上的操控按钮调节取货叉的位置时,通过摄像头对取货叉的位置进行拍摄,辅助操作者对调位气缸的控制,提高准确程度,受力传感器对取货叉承受的重量进行检测,并反馈到远程云端服务器,对于统计数据有着重要的意义。
11.本实用新型有益效果:通过取货平台上的取货叉向车厢内移动,将货物叉起,并通过取货叉的反向移动完成货物卸车工作,并且通过加长的取货叉,对于大型产品或多组同类产品进行一次性卸车,提高工作效率,通过摄像头和调位气缸的配合,提高取货叉进入车厢内的位置准确度。
附图说明
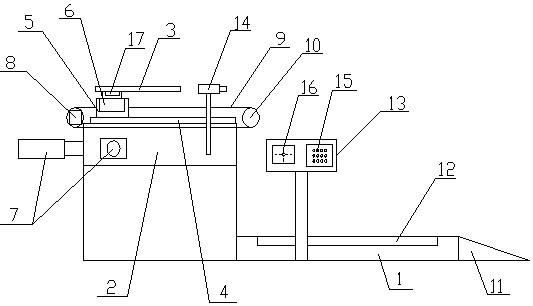
12.图1是本实用新型的结构示意图。
13.图2是本实用新型的取货叉结构正视图。
14.其中:1-停车底板,2-取货平台,3-取货叉,4-轨道,5-移动平台,6-液压缸,7-调位气缸,8-链条电机,9-链条,10-支撑轮,11-斜板,12-压力传感器,13-操作台,14-摄像头,15-操作面板,16-显示器,17-受力传感器。
具体实施方式
15.为了加深对本实用新型的理解,下面将结合实施例对本实用新型作进一步详述,该实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
16.如图1、2所示,本实施例提供一种物流集散中心用大型货物自动叉卸装置,包括停车底板1,所述停车底板1一侧设置有取货平台2,所述取货平台2上设置有取货叉3,所述取货平台2上端设置有轨道4,取货叉3通过移动平台5在轨道4上移动,所述轨道4一旁设置有动力机构,通过动力机构为移动平台5提供横向移动的动力,所述移动平台5上设置有液压缸6,液压缸6设置在取货叉3和移动平台5之间,所述取货平台2下端及侧面设置有调位气缸7。所述动力机构包括链条电机8、链条9和支撑轮10,支撑轮10的数量为两个且分别设置在轨道4两端,所述链条电机8的转轴连接在支撑轮10的圆心位置,链条9绕过支撑轮10形成一个闭环且移动平台5连接在链条9上层中部。所述停车底板1一端设置有斜板11,车辆通过斜板11倒入停车底板1上方,所述停车底板1上端面设置有压力传感器12,通过压力传感器12对停车底板1上是否停车进行判断。所述停车底板1一侧设置有操作台13,操作台13与调位气缸7连接,所述取货平台2上设置有摄像头14,操作台13上设置有操作面板15和显示器16,操作面板15与调位气缸7的气源通过信号线连接,所述显示器16与摄像头14通过信号线连接。所述取货叉3与液压缸6之间设置有受力传感器17,通过受力传感器17对取货叉3承受的重量进行检测,并反馈到远程云端服务器。
17.货车司机将车辆倒入停在停车底板1上,然后将货车车厢打开,根据车厢内的货物
位置,按动操作台13上的操控按钮,控制几个调位气缸7伸出或缩回,对取货叉3的位置进行调整,由于是静态调整,因此其难度较低,当取货叉3的位置准确后,动力机构中的链条电机8开始正转,带动取货平台2向车厢方向移动,取货叉3插入货物下方的底座插槽中,然后液压缸6开始工作,将取货叉3连带货物抬起,动力机构中的链条电机8开始反转,将货物从车厢内取出,并且结合带有传送带的下料轨道将货物运走,完成自动卸车工作。在货车司机操作操作台13上的操控按钮调节取货叉3的位置时,通过摄像头14对取货叉3的位置进行拍摄,辅助操作者对调位气缸7的控制,提高准确程度,受力传感器17对取货叉3承受的重量进行检测,并反馈到远程云端服务器,对于统计数据有着重要的意义。通过取货平台2上的取货叉3向车厢内移动,将货物叉起,并通过取货叉3的反向移动完成货物卸车工作,并且通过加长的取货叉3,对于大型产品或多组同类产品进行一次性卸车,提高工作效率,通过摄像头14和调位气缸7的配合,提高取货叉3进入车厢内的位置准确度。
技术特征:
1.一种物流集散中心用大型货物自动叉卸装置,其特征在于:包括停车底板(1),所述停车底板(1)一侧设置有取货平台(2),所述取货平台(2)上设置有取货叉(3),所述取货平台(2)上端设置有轨道(4),取货叉(3)通过移动平台(5)在轨道(4)上移动,所述轨道(4)一旁设置有动力机构,通过动力机构为移动平台(5)提供横向移动的动力,所述移动平台(5)上设置有液压缸(6),液压缸(6)设置在取货叉(3)和移动平台(5)之间,所述取货平台(2)下端及侧面设置有调位气缸(7)。2.如权利要求1所述的一种物流集散中心用大型货物自动叉卸装置,其特征在于:所述动力机构包括链条电机(8)、链条(9)和支撑轮(10),支撑轮(10)的数量为两个且分别设置在轨道(4)两端,所述链条电机(8)的转轴连接在支撑轮(10)的圆心位置,链条(9)绕过支撑轮(10)形成一个闭环且移动平台(5)连接在链条(9)上层中部。3.如权利要求1所述的一种物流集散中心用大型货物自动叉卸装置,其特征在于:所述停车底板(1)一端设置有斜板(11),车辆通过斜板(11)倒入停车底板(1)上方,所述停车底板(1)上端面设置有压力传感器(12),通过压力传感器(12)对停车底板(1)上是否停车进行判断。4.如权利要求1所述的一种物流集散中心用大型货物自动叉卸装置,其特征在于:所述停车底板(1)一侧设置有操作台(13),操作台(13)与调位气缸(7)连接,所述取货平台(2)上设置有摄像头(14),操作台(13)上设置有操作面板(15)和显示器(16),操作面板(15)与调位气缸(7)的气源通过信号线连接,所述显示器(16)与摄像头(14)通过信号线连接。5.如权利要求1所述的一种物流集散中心用大型货物自动叉卸装置,其特征在于:所述取货叉(3)与液压缸(6)之间设置有受力传感器(17),通过受力传感器(17)对取货叉(3)承受的重量进行检测,并反馈到远程云端服务器。
技术总结
本实用新型提供一种物流集散中心用大型货物自动叉卸装置,包括停车底板,所述停车底板一侧设置有取货平台,所述取货平台上设置有取货叉,所述取货平台上端设置有轨道,取货叉通过移动平台在轨道上移动,所述轨道一旁设置有动力机构,通过动力机构为移动平台提供横向移动的动力,所述移动平台上设置有液压缸,液压缸设置在取货叉和移动平台之间,所述取货平台下端及侧面设置有调位气缸。通过取货平台上的取货叉向车厢内移动,将货物叉起,并通过取货叉的反向移动完成货物卸车工作,并且通过加长的取货叉,对于大型产品或多组同类产品进行一次性卸车,提高工作效率,通过摄像头和调位气缸的配合,提高取货叉进入车厢内的位置准确度。度。度。
技术研发人员:任啟鹏
受保护的技术使用者:芜湖华平物流有限公司
技术研发日:2022.09.30
技术公布日:2023/3/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1