袋装自流平全自动包装机器人的制作方法
1.本实用新型涉及包装设备技术领域,具体为一种袋装自流平全自动包装机器人。
背景技术:
2.自流平地坪是加工好的特殊材料,加水调和成具有一定流动性的液态物质,依靠重力自由扩散形成水平面,并自然凝结成型的地坪施工做法,根据原材料的不同,自流平主要分为水泥(无机)自流平和环氧(有机)自流平两种。
3.现有技术中通过包装机器人对自流平需要的粉末原料进行自动化灌装以及包装,首先对袋体内部进行灌装,然后输送至下一个工位进行包装封口,整体设备不仅占用较大的空间体积,而且在灌满原料且未封口的袋体在移动时一定程度会从袋口发生泄漏的问题,整体操作起来较为麻烦。
技术实现要素:
4.基于此,本实用新型的目的是提供一种袋装自流平全自动包装机器人,以解决现有技术中整体设备不仅占用较大的空间体积,而且在灌满原料且未封口的袋体在移动时一定程度会从袋口发生泄漏的问题,整体操作起来较为麻烦的技术问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种袋装自流平全自动包装机器人,包括机器人主体,所述机器人主体内部顶端设置有灌装管,其中灌装管和机器人主体之间固定设置有橡胶圈,且灌装管与外界供料设备相连通,所述机器人主体内部顶端两侧皆固定有支撑限位板,两组所述支撑限位板内部皆滑动连接有齿板,两组所述齿板内侧皆固定有侧板,两组所述侧板内部顶端皆固定设置有真空吸板,两组所述侧板内部底端皆固定有热合板,两组所述真空吸板一侧皆固定有贯穿侧板以及支撑限位板的连接管道,两组所述热合板一侧皆固定有贯穿侧板以及支撑限位板的连接导线。
6.通过采用上述技术方案,通过将袋体袋口朝上放置进两组侧板之间,此时两组侧板内部的真空吸板对袋口两侧的袋面进行吸附,然后两组齿轮分别带动两组齿板做相互远离方向的运动,进而使袋口打开,然后通过灌装管对袋体内部进行灌装自流平的粉料,当灌装完成后,两组齿板做相互靠近的方向运动,进而使袋口两侧相互贴合,此时,两组热合板对袋口进行热合封袋包装,有效的避免了灌装完成的袋体还需要移动至下一个工位进行封口包装的操作,不仅降低了整体设备的空间占用,而且还避免了袋体移动时会一定程度导致粉料泄漏的问题。
7.本实用新型进一步设置为,所述机器人主体顶端两侧皆固定有支撑架,两组所述支撑架底部转动连接有与两组齿板相啮合的齿轮,齿轮一端固定安装有电机,两组所述电机和机器人主体之间通过固定架固定连接。
8.通过采用上述技术方案,其中电机以及齿轮的作用起到对齿板的驱动作用,且支撑架起到对齿轮的活动支撑,固定架起到对电机的固定支撑。
9.本实用新型进一步设置为,所述支撑限位板内部开设有与齿板相配合的滑动孔,
且滑动孔的截面呈矩形。
10.通过采用上述技术方案,其中支撑限位板起到对齿板的活动支撑作用,且不会影响齿板的滑动。
11.综上所述,本实用新型主要具有以下有益效果:本实用新型通过将袋体袋口朝上放置进两组侧板之间,此时两组侧板内部的真空吸板对袋口两侧的袋面进行吸附,然后两组齿轮分别带动两组齿板做相互远离方向的运动,进而使袋口打开,然后通过灌装管对袋体内部进行灌装自流平的粉料,当灌装完成后,两组齿板做相互靠近的方向运动,进而使袋口两侧相互贴合,此时,两组热合板对袋口进行热合封袋包装,有效的避免了灌装完成的袋体还需要移动至下一个工位进行封口包装的操作,不仅降低了整体设备的空间占用,而且还避免了袋体移动时会一定程度导致粉料泄漏的问题。
附图说明
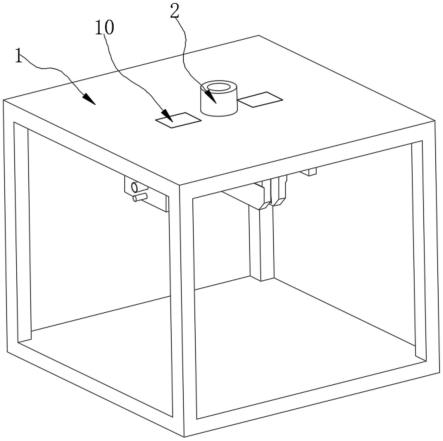
12.图1为本实用新型整体的结构示意图;
13.图2为本实用新型的剖视图;
14.图3为本实用新型图2的a处放大图;
15.图4为本实用新型放大后的局部结构示意图。
16.图中:1、机器人主体;2、灌装管;3、支撑限位板;4、齿板;5、侧板;6、真空吸板;7、连接管道;8、热合板;9、连接导线;10、支撑架;11、齿轮;12、电机;13、固定架。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
18.下面根据本实用新型的整体结构,对其实施例进行说明。
19.一种袋装自流平全自动包装机器人,如图1、图2、图3和图4所示,包括机器人主体1,机器人主体1内部顶端设置有灌装管2,其中灌装管2和机器人主体1之间固定设置有橡胶圈,且灌装管2与外界供料设备相连通,机器人主体1内部顶端两侧皆固定有支撑限位板3,两组支撑限位板3内部皆滑动连接有齿板4,两组齿板4内侧皆固定有侧板5,两组侧板5内部顶端皆固定设置有真空吸板6,两组侧板5内部底端皆固定有热合板8,两组真空吸板6一侧皆固定有贯穿侧板5以及支撑限位板3的连接管道7,两组热合板8一侧皆固定有贯穿侧板5以及支撑限位板3的连接导线9,通过灌装管2对袋体内部进行灌装自流平的粉料,当灌装完成后,两组齿板4做相互靠近的方向运动,进而使袋口两侧相互贴合,此时,两组热合板8对袋口进行热合封袋包装,有效的避免了灌装完成的袋体还需要移动至下一个工位进行封口包装的操作,不仅降低了整体设备的空间占用,而且还避免了袋体移动时会一定程度导致粉料泄漏的问题。
20.请参阅图4,机器人主体1顶端两侧皆固定有支撑架10,两组支撑架10底部转动连接有与两组齿板4相啮合的齿轮11,齿轮11一端固定安装有电机12,两组电机12和机器人主体1之间通过固定架13固定连接,本实用新型通过设置以上结构,其中电机12以及齿轮11的作用起到对齿板4的驱动作用,且支撑架10起到对齿轮11的活动支撑,固定架13起到对电机
12的固定支撑。
21.请参阅图4,支撑限位板3内部开设有与齿板4相配合的滑动孔,且滑动孔的截面呈矩形,本实用新型通过设置以上结构,其中支撑限位板3起到对齿板4的活动支撑作用,且不会影响齿板4的滑动。
22.本实用新型的工作原理为:使用时,接通电源,通过外界送袋机构将袋体放置进两组侧板5中间,此时两组侧板5内部的真空吸板6对袋口两侧的袋面进行吸附,然后两组齿轮11分别带动两组齿板4做相互远离方向的运动,进而使袋口打开;
23.然后通过灌装管2对袋体内部进行灌装自流平的粉料,当灌装完成后,两组齿板4做相互靠近的方向运动,进而使袋口两侧相互贴合,此时,两组热合板8对袋口进行热合封袋包装,有效的避免了灌装完成的袋体还需要移动至下一个工位进行封口包装的操作,不仅降低了整体设备的空间占用,而且还避免了袋体移动时会一定程度导致粉料泄漏的问题。
24.尽管已经示出和描述了本实用新型的实施例,但本具体实施例仅仅是对本实用新型的解释,其并不是对实用新型的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本实用新型的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1