一种自动化拆垛装车一体系统的制作方法
本技术属于自动化装置领域,具体涉及一种自动化拆垛装车一体系统。
背景技术:
1、目前在生产作业中,大分别工序都已经实现了自动化,但是在装车环节中,还是采用人工搬运的方式进行拆垛装车,而物料往往都过重,在搬运过程中容易发生意外,而且对工人劳损很大。
技术实现思路
1、针对现有技术存在的不足,本实用新型提供了自动化拆垛装车一体系统,实现物料拆垛装车的自动化。
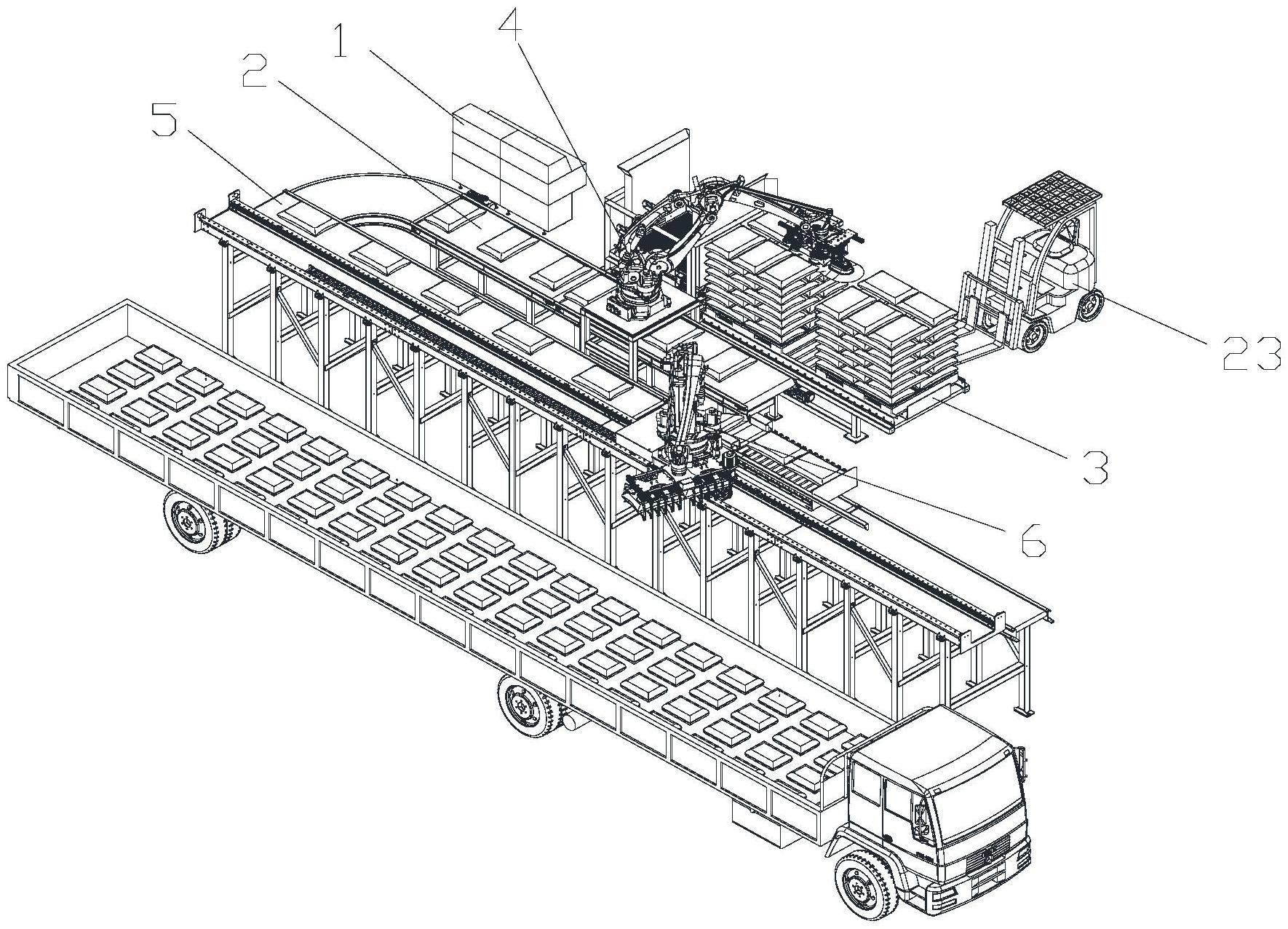
2、为达到上述目的,本实用新型采用以下技术方案:一种自动化拆垛装车一体系统,用于控制整个系统各部件的plc系统,还包括拆垛单元和装车单元;
3、所述拆垛单元包括第一输送带,所述第一输送带的侧面设有托盘支架,所述第一输送带还安装有拆垛机器人;
4、所述装车单元包括第二输送带,所述第二输送带的一端连接第一输送带的末端,所述第二输送带的侧面设有装车机器人。
5、进一步,所述拆垛机器人包括机器人主体,所述机器人主体的机械臂的臂端安装有吸盘组,所述吸盘组的侧面还固定有3d相机。
6、进一步,所述第一输送带包括第一支架、安装在第一支架上的第一电机和输送带带体。
7、进一步,所述第一支架的上方设有第一安装平台,所述第一安装平台与第一输送带保持预设间距,所述第一安装平台的底部两侧固定连接有一个支撑架以固定于地面,所述第一输送带位于两个支撑架之间。
8、进一步,所述装车单元还包括第二支架,所述第二支架上安装所述第二输送带,所述第二支架上还安装有导轨,所述导轨与第二输送带平行排布,所述导轨滑动连接有第二安装平台,所述第二安装平台还安装驱动组件以控制第二安装平台在导轨上的移动,所述装车机器人安装在第二安装平台上。
9、进一步,所述装车机器人包括机器人主体,所述机器人主体的机械臂的臂端安装有夹爪组件。
10、进一步,所述第二安装平台的底部的四角均安装有滚轮以配合导轨,所述导轨的侧面固定连接有齿条,所述齿条配合有齿轮,所述齿轮连接有第二电机,所述第二电机固定连接在第二安装平台的侧面。
11、进一步,所述第二支架为梯形阶梯状,具体分为高层和低层,所述第二输送带安装在第二支架的低层,所述导轨安装在高层,所述第二支架靠近第二输送带的一侧安装有暂存台,所述暂存台的靠近第二输送带的一侧安装有第三输送带,所述第三输送带为下坡,用于将下方的第二输送带的物料转运到上方的暂存台。
12、进一步,所述暂存台安装有第一辊筒输送轨道,所述第一辊筒输送轨道水平设置,其一端与第二输送带的输出端相接,其另一端安装有限位挡板。
13、进一步,所述托盘支架安装有第二辊筒输送轨道,所述第二辊筒输送轨道的末端设有自动托盘库。
14、与现有技术相比,本实用新型的有益效果为:拆垛单元将托盘上的物料拆垛并逐个运送到装车单元,装车单元将运送的单个物料重新码垛在车厢内,在plc控制系统的控制下实现自动化拆垛装车。
技术特征:
1.一种自动化拆垛装车一体系统,其特征在于,包括用于控制整个系统各部件的plc系统(1),还包括拆垛单元和装车单元;
2.根据权利要求1所述的自动化拆垛装车一体系统,其特征在于,所述第一输送带(2)包括第一支架(9)、安装在第一支架(9)上的第一电机和输送带带体。
3.根据权利要求2所述的自动化拆垛装车一体系统,其特征在于,所述第一支架(9)的上方设有第一安装平台(10),所述第一安装平台(10)与第一输送带(2)保持预设间距,所述第一安装平台(10)的底部两侧固定连接有一个支撑架以固定于地面,所述第一输送带(2)位于两个支撑架之间。
4.根据权利要求1所述的自动化拆垛装车一体系统,其特征在于,所述装车单元还包括第二支架(11),所述第二支架(11)上安装所述第二输送带(5),所述第二支架(11)上还安装有导轨,所述导轨与第二输送带(5)平行排布,所述导轨滑动连接有第二安装平台(13),所述第二安装平台(13)还安装驱动组件以控制第二安装平台(13)在导轨上的移动,所述装车机器人(6)安装在第二安装平台(13)上。
5.根据权利要求4所述的自动化拆垛装车一体系统,其特征在于,所述装车机器人(6)包括机器人主体,所述机器人主体的机械臂的臂端安装有夹爪组件。
6.根据权利要求4所述的自动化拆垛装车一体系统,其特征在于,所述第二安装平台(13)的底部的四角均安装有滚轮(14)以配合导轨,所述导轨的侧面固定连接有齿条(15),所述齿条(15)配合有齿轮(16),所述齿轮(16)连接有第二电机(22),所述第二电机(22)固定连接在第二安装平台(13)的侧面。
7.根据权利要求4所述的自动化拆垛装车一体系统,其特征在于,所述第二支架(11)为梯形阶梯状,具体分为高层和低层,所述第二输送带(5)安装在第二支架(11)的低层,所述导轨安装在高层,所述第二支架(11)靠近第二输送带(5)的一侧安装有暂存台(17),所述暂存台(17)的靠近第二输送带(5)的一侧安装有第三输送带(18),所述第三输送带(18)为下坡,用于将下方的第二输送带(5)的物料转运到上方的暂存台(17)。
8.根据权利要求7所述的自动化拆垛装车一体系统,其特征在于,所述暂存台(17)安装有第一辊筒输送轨道(19),所述第一辊筒输送轨道(19)水平设置,其一端与第二输送带(5)的输出端相接,其另一端安装有限位挡板。
9.根据权利要求1所述的自动化拆垛装车一体系统,其特征在于,所述托盘支架(3)安装有第二辊筒输送轨道(20),所述第二辊筒输送轨道(20)的末端设有自动托盘库(21)。
技术总结
本技术提供了一种自动化拆垛装车一体系统,包括PLC系统、拆垛单元和装车单元,所述拆垛单元包括第一输送带,所述第一输送带的侧面设有托盘支架,所述第一输送带还安装有拆垛机器人,所述装车单元包括第二输送带,所述第二输送带的一端位于第一输送带的末端,所述第二输送带的侧面设有装车机器人。本技术通过拆垛单元将托盘上的物料拆垛并逐个运送到装车单元,装车单元将运送的单个物料重新码垛在车厢内,在PLC控制系统的控制下实现自动化拆垛装车。
技术研发人员:邱克林,张长城,皮航顺
受保护的技术使用者:智喜机器人制造(湖北)有限公司
技术研发日:20221025
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!